













特斯拉人形機器人明年就能上線?專家:馬斯克想的太簡單了
「它會被用于處理無聊、重復和危險的工作,那些人類最不愿意做的事情。」特斯拉 CEO 伊隆 · 馬斯克說道。
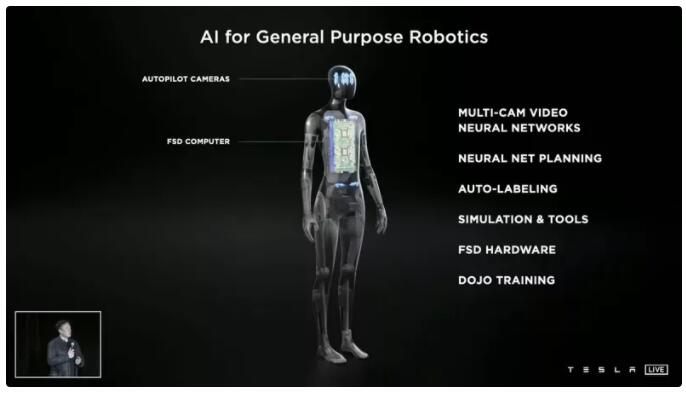
人形外觀,FSD 芯片加持,馬斯克的特斯拉機器人在 AI Day 上出盡了風頭,也刷新了人們對于未來機器人助手的認知。
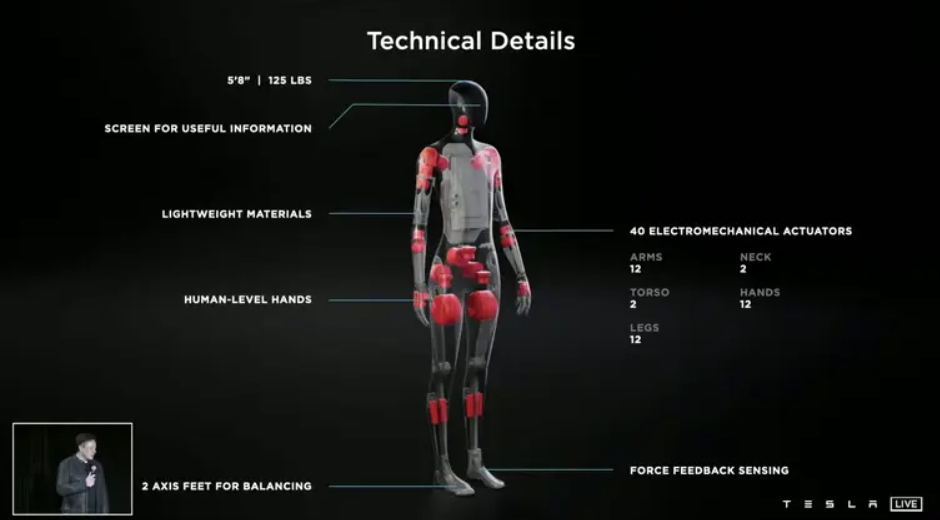
馬斯克在活動中并沒有提及機器人的售價是多少,只是說最遲明年會有原型機問世,到時它的臉上會裝備一塊屏幕,以顯示「有用信息」。
如果人類社會真正進入高度自動化時代,體力勞動將是一種選擇而非必須,全民無條件基本收入(Unconditional Basic Income)將成為常態,也就是說,機器人將對經濟產生「深遠」的影響。「但現在還不行,現在這臺機器人還無法工作,」馬斯克說道。
這個上臺跳舞的顯然是真人。
最近幾年,我們似乎很少看到科技的大跨步前進,電動車和手機都受限于電池技術的發展,連屏下攝像頭也是反復首發,最近剛剛「實用化」。馬斯克的一通發布讓人們高呼看到了希望,不過在驚艷的開場過后,也是時候冷靜下來思考了。
這件事真的有可能成功嗎?
昨天,來自知名學術期刊 IEEE Spectrum 的 Evan Ackerman 就對此進行了一番批判。作為一名資深編輯,Evan 自 2007 年加入之后已經發表過超過六千篇有關機器人和科技領域的文章。讓我們看看他是怎么說的。
Evan Ackerman:做人形機器人?馬斯克似乎想得太簡單了

在 Tesla AI Day 行將結束的時候,伊隆 · 馬斯克突然放出了「特斯拉機器人」(Tesla Bot)概念,這是一個重 57 公斤,高 152.4 厘米的電驅動「通用」人形機器人。
「概念」是指除了模型以外,馬斯克只展示了 PPT 并談了談他對機器人的看法。這讓我覺得,坦白地說,有些天真。根據六分鐘時長的演示內容,馬斯克似乎突然認為特斯拉已經準備好去制造自動人形機器人了——就像是在說,技術已經出現了,為什么不去做呢?
公平地說,馬斯克在可回收火箭和電動汽車等領域的成功確實值得贊賞,但人形機器人大不相同,而且要復雜得多。在航天領域,SpaceX 成立之時我們已經有了火箭技術,以及前沿領域的探索。而對于電動汽車,我們已經有了汽車、電池、傳感器和 DARPA 自動駕駛競賽。我這樣說并不是想要貶低馬斯克對于 SpaceX 和特斯拉所做的事情,而是在強調人形機器是一個非常不同的挑戰。
與火箭和汽車不同,人形機器人不是一項已有技術,需要遠大的理想、高水平的團隊和持續的資金投入。有了人形機器人,還有更多、更難的問題需要解決,我們距離實際解決方案還很遠。
幾十年來,許多非常聰明的人一直在積極探索這些方向,而且在軟硬件,尤其是軟件方面,仍然有很多非常基本的技術挑戰,這些突破可能是實現馬斯克愿景所必需的。
這些基礎突破對于特斯拉來說是不可能的嗎?當然不是不可能,但看看馬斯克所說的話,我不認為他對于「讓機器人做有用的事」有著深刻了解。為什么這么說呢?首先讓我們看看馬斯克說了些什么。
「我們的汽車是帶輪子的半智能機器人。」
我不知道這話是什么意思。半智能?我猜按照這種理解蟑螂也可以被劃分為半智能的,但暗示機器人在某種程度上實現了人類直覺的一部分是荒謬的。此外,自動駕駛汽車運行在高度受限的環境空間內,而且特斯拉的自動駕駛目前還面臨著很多眾所周知的問題。
「有了完全自動駕駛的計算機(即部署在汽車端側的推理引擎,之后還將繼續進化)和 Dojo 超算,以及所有識別世界的神經網絡,機器就能理解如何在真實環境中導航,把這些遷移到人形機器人身上自然也是順理成章的。」
這確實是特斯拉目前研究的方向。但是,特斯拉汽車的神經網絡是以汽車的角度審視世界的,它們尋找汽車需要理解的東西,對其他任何事情都一無所知,這會給 AI 帶來各種各樣的問題。與導航 APP 相同的是,自動駕駛汽車在一個由道路和相關事物組成的世界中運行。你不能只是把它「放在」一個人形機器人上,就期待它能管用,除非你想要它做的就是走在街上并遵守交通規則。
這里馬斯克的意思好像是通過足夠強大的算力來通向「通用的機器人 AI」,據我所知這和機器人領域的思路大相徑庭,尤其是對于物理機器人來說。
「特斯拉在傳感器、電池和執行器方面具備優勢,所以我認為明年的某個時候原型機就會出爐。」
通過足夠多的資金投入,特斯拉可以構建一臺馬斯克所說的人形機器人,這是合理的。那么明年能做到嗎?當然可以,但問題不在于構建一個機器人,而是讓機器人做有用的事情,我認為馬斯克在這里進入了自己的知識盲區。
沒有足夠機器人技術經驗的人似乎常常認為,一旦你構建了機器人,你就解決了大部分問題,所以他們專注于機械方面的東西,比如執行器,它會是什么樣子以及它的反應速度,力量跟能耗。但這只是一小部分,更難的問題出現在你擁有一個機械功能強大的機器人之后。
「這個機器人是打算在為人類打造的環境中導航的。」
這句話道出了開發人形機器人為數不多的理由之一,我甚至不確定這個理由是否真的足夠充分。人類的世界充滿了各種不同的環境類型,到處都是對機器人不友好的東西。而且一個 125 磅的人形機器人天生就是不穩定的,面臨各種安全問題。
為了讓機器人在人類的環境中自由行動,波士頓動力和敏捷機器人公司已經努力了幾十年。這是一個超級難的問題,我不知道馬斯克為什么覺得自己可以在這么短的時間之內做到更好。

波士頓動力前段時間放出的失誤 demo。
馬斯克在演講中提到的「人類水平的手(human-level hands)」就是一個很好的例子,解釋了為什么我覺得馬斯克沒有意識到這個機器人背后的工作量。「人類水平的手」是什么意思?如果這里指的是有五根手指,能像人類一樣感知環境并具有一定的靈活性,那么這種手其實已經有了,只是比較脆弱、昂貴。從硬件的角度來看,要想把這種手做得實用,背后涉及巨大的工程量,這也是大家不愿意這么去做的原因。多數機器人用的是更簡單、更穩健的方案,即只安裝兩三根手指夾持器。
特斯拉能解決這個問題嗎?只要有足夠的時間和金錢,我相信他們完全能做到。但這個做到了,機器人的其他部分呢?硬件足夠強大了,軟件呢?這里想說的是,我們現在討論的是一個大問題中的大問題。至于整個問題有多大,馬斯克似乎并沒有考慮。
「…… 去完成那些危險、重復、無聊的任務。」
這句話說得好,這也正是機器人該做的事情。但馬斯克自己也知道,讓機器人去做這些事情很難。這并不是因為機器人不夠有能力,而是人類的能力太強大了。我們為各種能力和能力的多樣性設置了很高的標準,但這些標準并不總是顯而易見的。即使這些標準很明顯,機器人也可能無法有效地復制它們。
「我認為打造一個真正有用的人形機器人的難點在于,它能在不經過明確訓練、沒有逐行指示的前提下在人類的世界中導航嗎?你能否對它說,『請拿起那個螺栓,用扳手把它固定在車上』,或者『去商店幫我買一下這個清單上的食品』?」
其實,當機器人清楚地知道環境中都有什么的時候,它們已經能夠脫離逐行指示在環境中導航了。如果這里的環境指的是「道路」、「我的公寓」或「購物中心」,這就是一個解決程度高達 95% 的問題。但真正令人頭疼的是剩下的 5%。如果你說的是「我的公寓加上附近的任意一家食雜店再加上公寓和食雜店之間的一切」,那整個環境就變成了一個很難結構化或預測的空間。
如何在這些空間中移動本身就是一個問題。里面有樓梯嗎?有很重的門嗎?有斑馬線嗎?有很多人嗎?對于那些背后有人監控的輪式送貨小機器人來說,這個環境已經夠復雜了,更別說一個拿著東西的人形自主機器人了。走進食雜店,從架子上取下東西放進小推車,然后還要安全地推著小推車,這些都是尚未解決的前沿機器人問題。即使是在有機械臂的輪式工業機器人身上,我們也很少看到這種成果,甚至在研究中都很少。當前的情況是,如果沒有針對任務進行專門設計,讓機器人「拿起那個螺栓」都不是件容易的事。
正如馬斯克所說,特斯拉明年有可能造出某種 Tesla Bot,但我認為不會是概念圖上展示的這種。或許它可以站起來走兩步,承受一兩次撞擊,還能識別并抓取一些簡單的物體。但在完成這些之后,他們的進程會慢下來。我不認為特斯拉能趕上波士頓動力或敏捷機器人公司。或許他們最終會開發出一個類似 ASIMO 的東西,只能貢獻令人印象深刻的 demo,但實際上什么都做不了。
馬斯克此舉還有一個讓我比較不安的地方:他所描繪的關于 Tesla Bot 的愿景似乎在暗示,他輕而易舉就能超越在人形機器人領域努力了幾十年的機器人專家。馬斯克似乎覺得,他能完成前人都沒有做到的事情:構建一個有用的通用人形機器人。他似乎在暗示,通用人形機器人其實沒那么難做,只要有更聰明、更勤奮的人,投入更多資金,我們可能早就把它攻克了。
我覺得他錯了。但如果特斯拉真的投入時間和金錢去解決一些機器人領域的難題,或許他們真能取得一些成果,進而推動整個領域的發展。我覺得能做到這一點就已經算得上成功了。




























