













物聯(lián)網(wǎng)之堆垛機預測性維護
堆垛機是一種自動化倉儲設備,它能夠在立體倉庫的巷道間來回穿梭,將位于巷道口的貨物存入貨格,或者將貨格中的貨物取出并運送到巷道口。堆垛機是實現(xiàn)自動化倉儲和物流系統(tǒng)中的重要組成部分,廣泛應用于各種行業(yè)和領域。
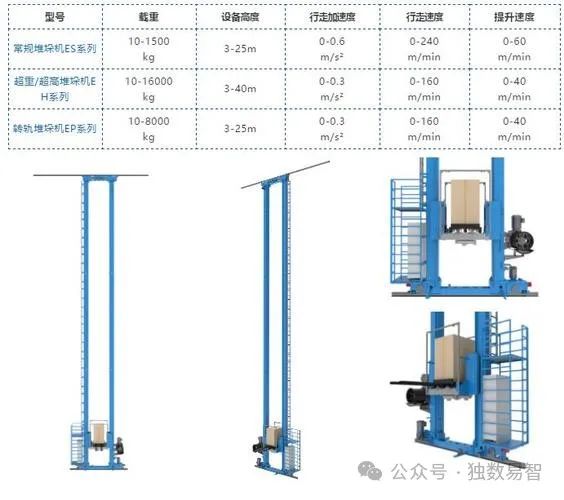
一、技術參數(shù)
堆垛機的技術參數(shù)包括以下幾個方面:
- 額定起重量:指堆垛機能夠正常工作的最大負載能力。
- 起升高度:指堆垛機能夠將貨物提升到的最大高度,通常以米為單位表示。
- 運行速度:包括水平運行速度和垂直提升速度,通常以米/秒或米/分鐘為單位表示。
- 貨叉伸縮距離:指堆垛機貨叉能夠伸縮的最大距離,通常以毫米或米為單位表示。
- 定位精度:指堆垛機在水平和垂直方向上的定位準確度,通常以毫米為單位表示。高精度的定位系統(tǒng)可以確保堆垛機準確地將貨物存放到指定位置或從指定位置取出
- 貨叉最大回轉角度:堆垛機能夠使用的最大貨叉回轉角度。
- 貨叉最大水平傾角:堆垛機能夠使用的最大貨叉水平傾角。
- 貨叉起升電機功率:堆垛機使用的貨叉起升電機的功率。
- 變頻器功率:堆垛機使用的變頻器的功率。
二、工作原理
堆垛機的工作原理可以簡單概括為:先將貨物放到貨叉上,然后通過控制貨叉的伸縮和旋轉來實現(xiàn)貨物的堆放。堆垛機的貨叉和托盤之間存在一定的夾角,這個夾角的大小可以通過調(diào)節(jié)貨叉的角度來實現(xiàn)。
三、結構組成
堆垛機的結構組成包括以下幾個方面:
- 主機:堆垛機的核心部件,包括電機、傳動系統(tǒng)和控制系統(tǒng)等。
- 貨叉和托盤:堆垛機的基本構件,用于堆放貨物。
- 貨叉起升電機和變頻器:堆垛機使用的貨叉起升電機和變頻器是控制貨叉起升和旋轉的關鍵部件。
- 托盤輸送機:用于輸送托盤。
- 控制系統(tǒng):堆垛機的控制系統(tǒng)用于控制貨物的堆放過程。
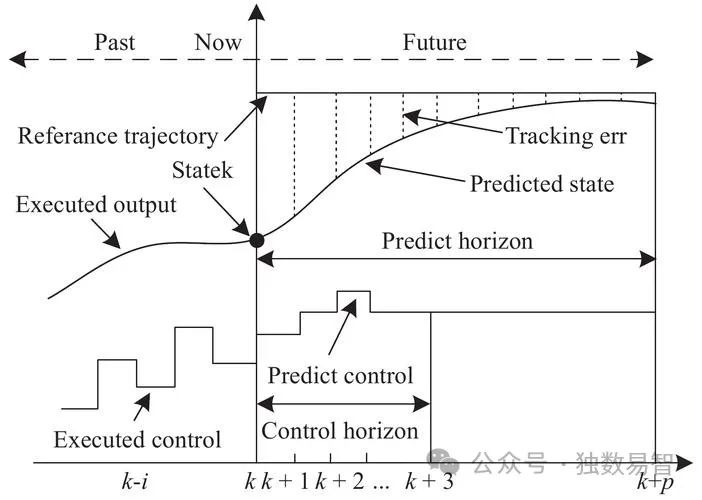
四、預測性模型開發(fā)
基于深度學習的堆垛機預測性維護,方法包括:收集堆垛機的歷史故障數(shù)據(jù),歷史故障數(shù)據(jù)包括發(fā)生故障之前的一段時間內(nèi)的故障狀態(tài)參數(shù)數(shù)據(jù)組;依據(jù)歷史故障數(shù)據(jù)建立分析堆垛機發(fā)生故障率的基礎模型;實時采集堆垛機工作時的狀態(tài)參數(shù),并輸入至基礎模型中,然后基于基礎模型分析實時采集的堆垛機的狀態(tài)參數(shù),并輸出堆垛機故障率值。
- 數(shù)據(jù)收集:收集堆垛機的運行數(shù)據(jù),如運行狀態(tài)、振動、溫度、聲音等,以及相關的環(huán)境數(shù)據(jù),如溫度、濕度、氣壓等。通過傳感器和監(jiān)控系統(tǒng)提取。
- 數(shù)據(jù)預處理:對收集到的原始數(shù)據(jù)進行清洗、去噪、歸一化等處理,以便更好地進行后續(xù)的數(shù)據(jù)分析和機器學習。
- 特征提取:從預處理后的數(shù)據(jù)中提取出與堆垛機性能和故障相關的特征,如頻率、振幅、波形等。這些特征可以反映設備的運行狀態(tài)和潛在的故障模式。
- 模型訓練:使用提取的特征和相應的標簽(即設備的故障狀態(tài))訓練預測性維護模型。常見的算法包括支持向量機、神經(jīng)網(wǎng)絡、決策樹等。
- 模型評估:使用測試數(shù)據(jù)集對訓練好的模型進行評估,以確定模型的準確性和可靠性。評估指標包括準確率、召回率、F1值等。
五、預測性模型精度提升
堆垛機預測性維護模型所需的數(shù)據(jù)量取決于多個因素,包括模型的復雜度、數(shù)據(jù)的質(zhì)量和可用性、訓練集和測試集的劃分方法等。一般來說,模型所需的數(shù)據(jù)量越大,訓練出的模型可能具有更好的性能。但同時,過量的數(shù)據(jù)可能會導致過擬合問題,即模型在訓練數(shù)據(jù)上表現(xiàn)良好,但在測試數(shù)據(jù)上表現(xiàn)較差。因此,在選擇數(shù)據(jù)量時需要權衡模型的性能和泛化能力。
此外,對于一些復雜的模型,如深度神經(jīng)網(wǎng)絡,可能需要更多的數(shù)據(jù)才能獲得較好的性能。而對于一些簡單的模型,如線性回歸或邏輯回歸,相對較少的數(shù)據(jù)量可能就足夠了。
可以通過交叉驗證、留出驗證等方法來評估模型性能,并選擇合適的數(shù)據(jù)量進行訓練。同時,為了提高模型的泛化能力,可以采用正則化、集成學習等技術來處理過擬合問題。




















