宜信研發總監張真:運維機器人之任務決策系統演進
原創【51CTO.com原創稿件】2018年5月18-19日,由51CTO主辦的全球軟件與運維技術峰會在北京召開。此次峰會圍繞人工智能、大數據、物聯網、區塊鏈等12大核心熱點,匯聚海內外60位一線專家,是一場高端的技術盛宴,也是頂級IT技術人才學習和人脈拓展不容錯過的平臺。
在“容器下的AIOps”分會場,宜信研發總監張真做了主題為《運維機器人之任務決策系統演進》的精彩演講。演講過程中,分析了AIOps系統的目標與挑戰,對運維機器人和任務決策系統進行了闡述、對任務決策系統演進做了深入的剖析。
AIOps自身的目標與挑戰
宜信是一家金融企業,業務關聯復雜性非常高,如圖1是由宜信UAVStack(全維監控軟件)產出的狀態監控圖。
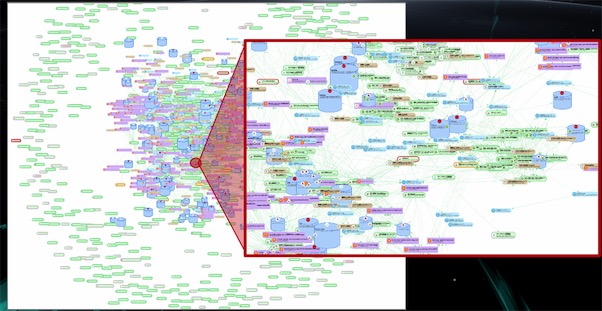
圖1 UAVStack產出的狀態監控圖
這張錯綜復雜的狀態圖,描繪了宜信所處的生產環境中,應用、數據庫、服務和緩存等多個關聯件之間的調用與關系。面對這樣復雜的業務規模,尤其是微服務架構上,即便是一個非常簡單的微服務,排除故障都不是易事。這樣的狀態下,自動化運維不再是最佳選擇,AIOps系統勢必成為必然。AIOps系統可以通過深度洞察能力為運維提供持續、高質量的效率運轉,相比自動化運維來說,不會再受限于人的生理極限和認知局限。
在做AIOps系統之前,需要設立明確的目標,更重要的是需要應對種種挑戰分析透徹。
三大目標
目標一:時效類。自動化運維雖大幅度提高了我們的時效,但核心決策者仍然是人。當超越了人的生理極限,效率也將很難保證,但是AIOps系統則不存在上述問題。
目標二:深度洞察。人的認知有局限性,AIOps系統則可以利用大數據,洞察更多現存問題與未知的運維模式。
目標三:自主調優。AIOps系統可以自主保持系統最優狀態,自主生成達成目標需要的執行計劃。
六大挑戰
理想與現實究竟有多遠? 構建AIOps系統的過程中需要面對的挑戰如下:
一、如何獲取高質量,高時效的監控數據。傳統監控體系中,想要獲得更多的數據就必然要建立各種系統。這些系統本身在時效和品控層面如何達成一致是個難題。
二、多維度數據如何實現高效關聯。僅有數據不能解決任何問題,需要把所有數據有機有效進行關聯才可以。
三、如何實現運維場景的實時感知。工程師之所以比傳統監控和運維系統靠譜,主要是因為運維工程師了解非常多的現實認知能力,如機房、網絡、虛機等相關詳情。如果希望AIOps系統做的更好,就需要增強其運維場景的感知能力。
四、AI“工程化”的復雜性。實際過程中,把機器學習算法落地到實際場景的這個過程還有很多的路要走,相比實驗室中的機器學習要難很多。
五、機器學習模型的訓練困境。生產運維中SLA(Service-Level Agreement,服務等級協議)的矛盾和故障樣本太少,致使仿真模擬有局限。
六、遺留技術棧,混合架構的復雜性。初創公司會有大量歷史的遺留技術棧與混合技術架構,遺留系統“業務需求”變更頻繁。那么,要如何使它們很好的融合到AIOps系統呢?
確定目標,明晰挑戰之后,宜信制定了適合自己的AIOps技術路線,如圖2所示。
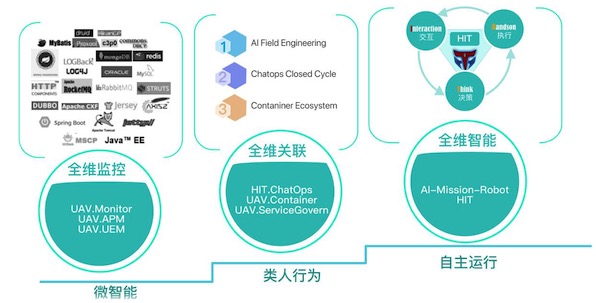
圖2 AIOps的技術路線
AIOps的技術路線分為三個步驟:全維監控、全維關聯和全維智能。全維監控階段,需要將監控體系進行統一,盡量去獲取高質量高時效的監控數據,利用監控軟件去提取不同運維場景中的源數據,同時去適應和適配遺留技術棧和各種混合架構。全維關聯階段,需要將多維數據進行高效關聯,同時解決機器學習模型的訓練困境問題。全維智能階段,需要花費時間攻破AI工程化的復雜性。
運維機器人是AIOps系統的核心
確定AIOps的技術路線后,宜信首先落地的是權威監控平臺——“運維機器人”。運維機器人,也叫AI-Mission-Robot(任務機器人),如圖3所示。
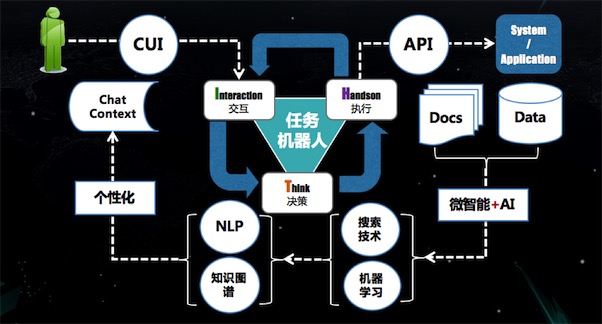
圖3運維機器人
任務機器人的設計理念是基于CUI形式交互,基于API形式執行,結合微智能、人工智能等前沿技術,使運維機器人實現真正意義上的決策,并且最終很好的向運維人員進行反饋。
任務機器人之所以是AIOps系統的核心,在全維關聯和全維智能的作用很關鍵,如圖4所示。
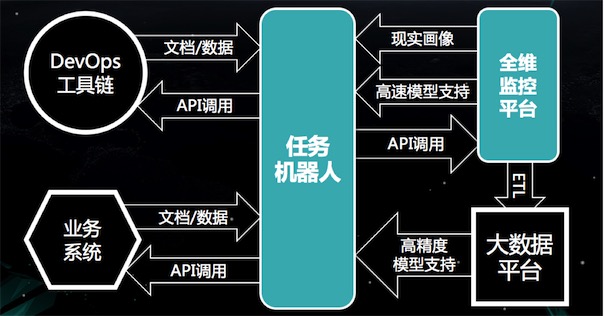
圖4任務機器人是核心
任務機器人的作用是對接全維監控平臺和大數據平臺,同時也要面向DevOps工具鏈和業務系統。
淺析任務決策系統的六大職責
在介紹了任務機器人的基本概況后,張真對任務機器人的任務決策系統及其職責進行了淺析。
什么是任務決策系統
張真表示,了解認知和決策之間的關系,是理解任務決策系統的前提,如圖5所示。
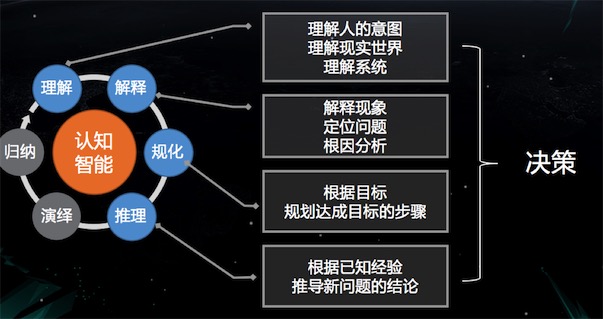
圖5 認知和決策的關系
認知智能的理解、解釋、規劃和推理四部分和決策息息相關,映射到智能運維場景中,對應的便是如圖5所示的四點,從中可以看出,任務決策的前提是增強現實感知。
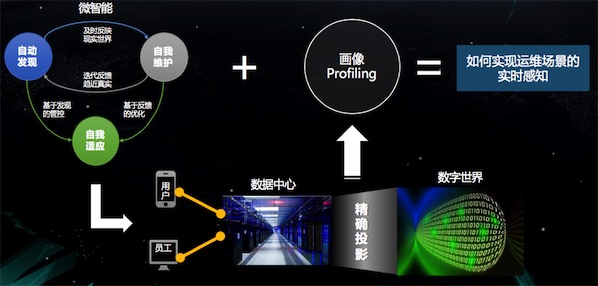
圖6 增強現實感知的過程
圖6是增強現實感知的過程。通過這種方式,實現對用戶場景的感知。在這個過程中, AI提供了很多決策能力,如利用機器學習技術進行分類判斷和回歸檢測、知識圖譜的構建和系統加深對事物的認知、以及搜索技術實現模糊和精確的匹配等。
任務驅動模式和自主驅動模式是任務機器人的兩種驅動模式:任務驅動模式是被動任務,當收到發出的指令,理解指令的意圖后,任務決策的同時決策任務執行方式,最后執行任務并反饋結果。自主驅動模式是主動接受來自施令者的期望,對意圖進行理解之后,規劃任務實施方案去主動執行任務,應需反饋結果。
任務決策系統的六大職責
為了支撐任務驅動模式和自主驅動模式這兩種驅動模式,任務決策系統需要具備六大職責,如圖7所示。

圖7 任務決策系統的六大職責
接下來,張真對每個職責的基本工作原理進行了詳盡的解讀。
職責一:意圖理解
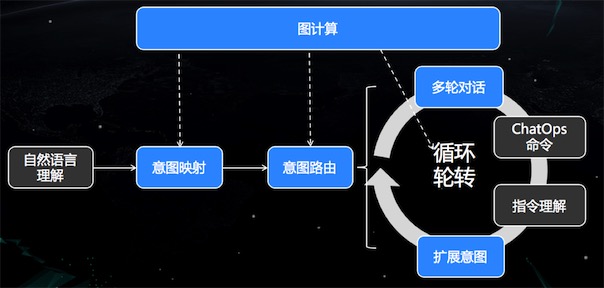
圖8 意圖理解的工作原理
如圖8所示,意圖理解首先進行自然語言理解,再把自然語言映射成機器人能夠理解的語素,再進入意圖路由。意圖路由的作用是理解人的指令,基本上可以分為四種:
- 人和機器人之間進行多輪對話。
- 人給出直接性的指令(ChatOps指令)。
- 判斷是否需要進入指令理解的過程。指令理解就是把偏向于自然語言的語素翻譯成偏向于機器人理解的語素。
- 擴展意圖,在這個過程中,需要使用圖計算技術。圖計算包含算法、整個圖的構造和查詢過程三部分。
職責二:系統理解
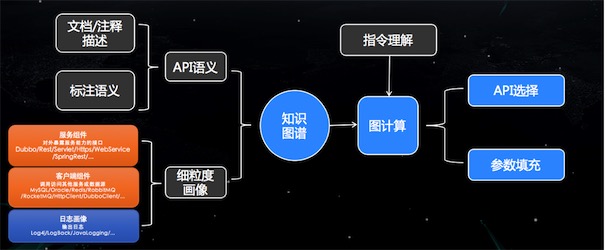
圖9 系統理解的工作原理
如圖9 所示,系統理解首先是構造知識圖譜,分為API語義和細粒度畫像兩部分。之后再結合指令理解的結果,進行一個圖計算的過程,帶來兩個效果:一個是可以幫助選擇要用的API,另一個是做參數填充。
職責三:現實理解
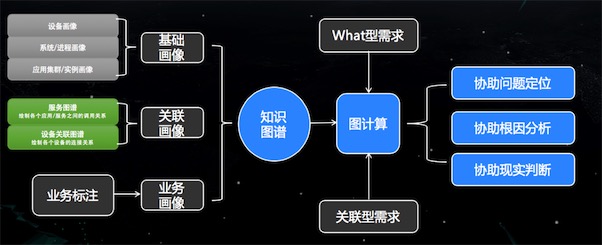
圖10 現實理解的工作原理
如圖10所示,現實理解也要先做知識圖譜,這就需要收集多維數據,如基礎、關聯和業務畫像等。之后通過圖計算的方式,解決What型和關聯型兩個需求。最后,在之前工作的基礎上,協助問題定位、根因分析和現實判斷。
職責四:異常檢測
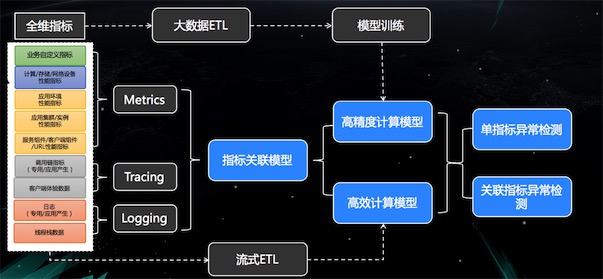
圖11 異常檢測的工作原理
異常檢測的工作原理如圖11所示,把全維指標(也就是全維監控階段拿到的數據)轉換成指標關聯模型,涉及高效計算和高精度計算這兩種模型。先由高效計算模型進行計算,粗略得出來一個結論,再交給高精度模型實現。
職責五:問題分析
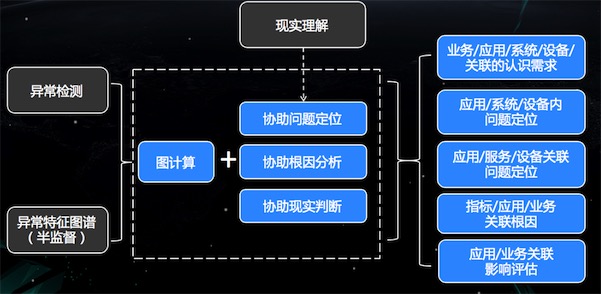
圖12 問題分析的工作原理
如圖12所示是問題分析的工作原理,當有異常檢測的結果或者異常特征圖譜(數學空間中的一套模型)輸入后,加上現實理解,通過計算和圖12中所示的三大協助分析能力,最終得出一系列的關聯認知需求、問題定位、關聯根因和影響評估。
職責六:執行計劃
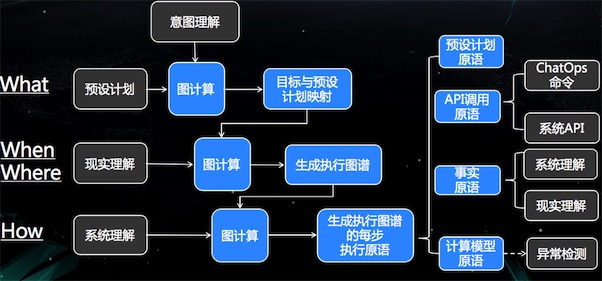
圖13 執行計劃的工作原理
如圖13所示,是執行計劃的工作原理,主要分為預設計劃,現實理解和系統理解這三個層次。執行計劃職能是對之前五個職能的理解與整合,是自主驅動模式中最重要的點。當有了這樣的執行計劃后,很多執行計劃就可以相互嵌套,當嵌套到一定復雜度時,便可以形成一個非常復雜的工作過程,這個工作過程就是任務機器人慢慢趨近于人,逐步智能化的過程。
任務決策系統的具體的演進
緊接著,張真通過一些案例,剖析了任務決策系統的具體演進。任務決策系統是AIOps平臺架構中的一個版塊,如圖14所示。

圖14 AIOps平臺框架
AIOps平臺框架底層是微服務計算平臺,基于這個平臺之上,構建全維監控服務和任務機器人系統。任務機器人系統包含Interaction、Think和Handson三大部分,任務決策服務是Think其中之一的版塊。
任務驅動架構的四次迭代
第一代任務驅動架構,指令理解、參數填充是在代碼層進行實現,包括任務確定,全維監控之間的關系,也是靠服務注冊發現來完成的。第二代任務驅動架構,不僅加入了自然語言和指令理解,初步引入知識圖譜,還實現了基于語意模板的方式進行回復。第三代任務驅動架構,構建了微智能知識圖譜的同時,加入多輪對話的管理,已經基本可以判斷清楚人的意圖,并且可以對整個報警的簡單統計。
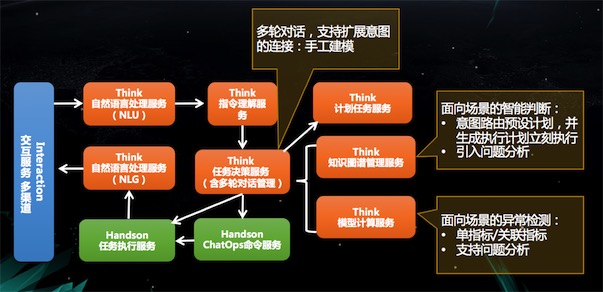
圖15 第四代任務驅動架構
如圖15所示,第四代架構豐富了很多功能,如多輪對話支持擴展意圖的連接、知識圖譜本身管理服務、引入問題分析等。
自主驅動架構的兩次迭代
對比報警之后再進行處理的任務驅動模式,自主驅動方式使得運維從被動變為主動。自主驅動就是宜信正在做的智能巡檢場景,這等同于運維工程師對系統進行常規巡檢的效果。
智能巡檢異常檢測、問題定位、根因分析、影響評估和自愈計劃是智能巡檢場景的五個步驟。實現智能巡檢,有兩個基本過程:記憶期望和主動實施。
自主驅動(第一代)過程一:記憶期望
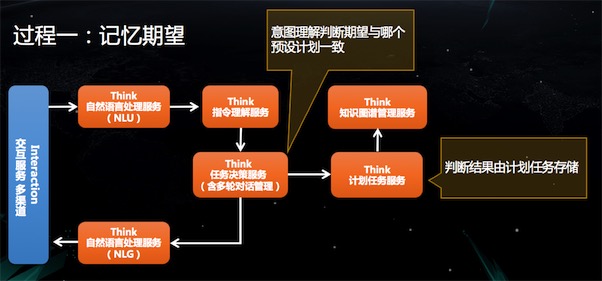
圖16 自主驅動過程一:記憶期望
如圖16所示,首先任務機器人要記住我們的某個期望,在理解業務的前提下,高頻執行。判斷我們給的期望和其中的某個計劃相一致,并且把結果進行存儲,這個過程中存儲的是預設計劃結果,并不是真正的執行計劃。當真正執行時,就可以根據上下文生成一個具體的工作列表。
自主驅動(第一代)過程二:主動實施
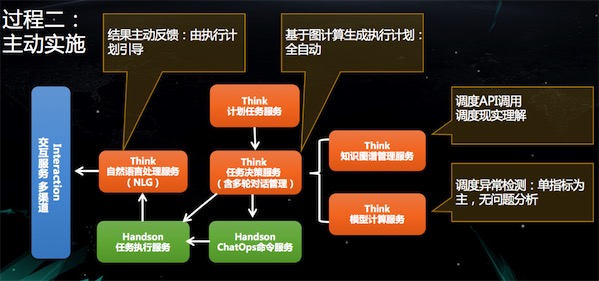
圖17 自主驅動過程二:主動實施
如圖17所示,當機器人真正去執行時,遵循執行計劃的工作原理,基于圖計算全自動生成執行計劃。同時執行計劃針對知識圖譜進行調度API調用,進而對現實進行理解。通過模型計算對調度進行異常檢測,這一代以單指標為主,不涉及問題分析。
自主驅動(第二代)
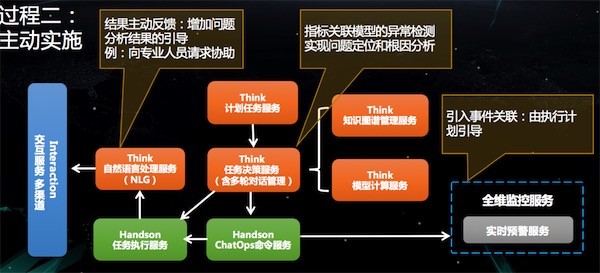
圖18 自主驅動(第二代)架構圖
如圖18所示,自主驅動(第二代)增加問題分析結果的引導,實現結果主動反饋,實時向專業人員請求借助。指標關聯模型的異常檢測方面,加入了問題定位和根因分析的過程,同時在預警服務部分引入了事件關聯。
任務決策系統的未來
任務決策系統的未來將針對以下方面進一步攻克:
- 準確率需要不斷的提高。
- 針對問題診斷結果進行影響面的評估(系統/應用/業務層面),從而決定自愈執行的手段。
- 人機互助增強,在系統尋求人的協助基礎上,實現雙向的協作支持。
- ChatOps命令意圖理解全自動化,也就是實現部署即理解。
- 引入一些半自動化協助手段,幫助預設計劃建模,降低預設計劃建模復雜性。
- 目前還是針對特定場景的建模方式,通用性不足,高指標關聯模型的通用性還有待提高。
演講最后,張真對本次演講行總結:應對AIOps自身挑戰的技術路線是從全維監控到全維關聯,最后到全維智能。任務機器人是AIOps系統的核心,基于它才能實現全維關聯和全維智能。任務決策是認知智能與AI技術結合的體現,包括六個基本職能:系統理解、現實理解、意圖理解、異常檢測、問題分析和執行計劃。任務機器人有任務和自主兩種驅動模式,任務驅動關鍵是根據人的意圖映射成系統可執行的操作,自主驅動關鍵是執行計劃的生成,并且影響到執行的效果。
【51CTO原創稿件,合作站點轉載請注明原文作者和出處為51CTO.com】