基于RFID技術的室內定位方法簡述
由于建筑物遮擋等因素,定位精度達到10米以下的民用GPS室外定位無法為室內定位服務提供高精度服務。同時,伴隨著5G技術的發展,新的編碼方式、波束賦形、大規模天線陣列、毫米波頻譜等為高精度距離測量提供技術支持。因此,室內定位的研究成為無線傳感器網絡服務的一個重要分支。
通常用于室內定位研究的傳感器包括:Wi-Fi、藍牙、RFID、紅外、ZigBee等。本文我們將以RFID技術為藍本,向大家介紹室內定位原理。
1.RFID定位原理
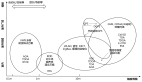
如圖1所示,目前傳統的RFID室內定位跟蹤系統是一種以計算機為基礎,集合了RFID數據采集,RFID數據處理與傳輸、GIS空間分析和查詢等技術形成的智能技術系統。

圖1 基于RFID的室內定位系統結構圖
其定位依據是結合RFID信號的接收信號強度、相位等參數,利用定位算法完成距離和方位的計算。例如,Saad等人通過捕獲標簽的相位信息,利用卡爾曼濾波來計算標簽的位置[1]。Alippi等人則是利用安裝在固定位置的讀寫器天線,通過旋轉對環境中的標簽進行掃描,獲得標簽所在的角度范圍及其接收信號強度,并利用貝葉斯網絡計算標簽的位置[2]。而Choi等人提出一種利用目標標簽對參考標簽的信號強度的干擾對標簽進行定位的方法[3]。清華大學劉云浩教授的團隊提出了一種基于無源RFID標簽信號強度高階變換的高精度室內定位方法,其定位精度可以到厘米級別[4-5]。
2.常見的定位算法
2.1 三邊測距法
如圖2所示,Hightower等提出的SpotON系統[6]是該類型算法的典型代表。系統使用3個或3個以上的讀寫器作為基站,記錄每個讀寫器讀到的標簽接收信號強度,通過三角測距的方法,計算出標簽的位置[7]。
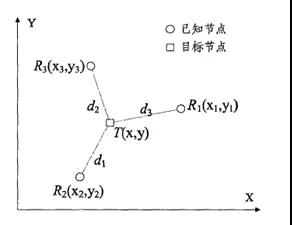
圖2 SpotON系統原理示意圖
2.2 LANDMARC定位算法
Landmarc[8]是近年來比較熱門的RFID定位系統。其主要思想是引入了參考標簽。在室內若干個固定位置分別部署讀寫器和參考標簽,通過比對參考標簽和目標標簽的接收信號強度,從而推算出目標標簽的位置。隨后,不少學者對Landmarc系統進行改進以提高其定位精度。其中,Jin等人在Landmarc系統中引入了鄰居節點的概念,以此提高定位的效率[9]。Chattopadhyay等人則是通過對參考標簽的排列方式和密度進行定量分析,指出Landmarc系統的定位效果依賴于標簽的擺放方向,需要標簽都按照同樣的方向擺放,或者標簽天線自身有著良好的全向性[10]。
同時,該團隊利用神經網絡對Landmarc系統進行改進,通過預先布置的目標標簽和參考標簽的信號強度,對神經網絡進行訓練,利用訓練好的神經網絡,來計算未知的目標標簽的位置[11]。Choi等人在系統中引入了一個信號強度修正方法,利用修正后的目標標簽和參考標簽的信號強度來進行位置計算[12]。香港科技大學的趙戈洋等人提出了基于虛擬參考標簽的VIRE(Virtualreferenceelimination)算法,通過線性插值方式結合實際參考標簽的位置信息和信號強度,估計虛擬參考標簽的位置信息及信號強度,實現室內傳輸環境的細粒度化[13]。
2.3 到達時間定位算法(TOA)
如圖3所示,Xu等人利用到達時間法對人員的運動軌跡進行跟蹤[14];Wang等人則是將L-MUSIC方法與到達時間法整合,實現對標簽定位[15]。然而,到達時間法存在一定缺陷:
(1)由于室內定位的應用場景通常較小,標簽到讀寫器的距離較近,以電磁波在空氣中的傳播速度,進行短距離測距需要很高的時間精度;
(2)讀寫器和標簽之間需要精確的同步;
(3)RFID自身較低的通信速率,使得精確的時間戳(Timestamp)的加入較為困難。
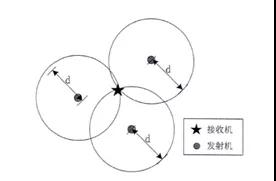
圖3 TOA算法原理示意圖
除了以上提到的方法之外,波達角(AOA)、波達方向(DOA)等室內定位算法也是研究熱點,能夠提供較好的定位精度。目前,室內定位應用正處于從研究室走向實際應用階段,如香港中文大學的室內定位技術在菜鳥驛站中開始進行應用,如何從理論算法的研究到工業生產應用是研究學者仍需解決的問題。
參考文獻:
[1] De Jesus N S, Marciano J S. Enhancing theaccuracy of direction-of-arrival (DoA) estimates of passive UHF RFID tagsignals using adaptive filtering[C]. 10th International Conference onInformation Sciences Signal Processing and their Applications, 169-172, 2010.
[2] Saad S S, Nakad Z S. A standalone RFID indoorpositioning system using passive tags [J]. IEEE Transactions on IndustrialElectronics, vol.58, no.5, 1961-1970, 2011.
[3] Choi J S, Lee H, Engels D W, et al. Passive UHFRFID-based localization using detection of tag interference on smart shelf [J].IEEE Transactions on Systems, Man, and Cybernetics, vol. 42, no.2, 268-275,2012.
[4] L. Yang, Y. Chen, X.-Y. Li, C. Xiao, M. Li, andY. Liu. Tagoram: Realtime Tracking of Mobile RFID Tags to High Precision UsingCOTS Devices. In Proceedings of ACM MobiCom, 2014.
[5] L. Shangguan, Z. Li, Z. Yang, M. Li, Y. Liu,and J. Han. OTrack: Order Tracking for Luggage in Mobile RFID Systems.Transactions on Parallel and Distributed Systems, vol. 25, 2114–2125, 2014.
[6] Higlitower J, Want R, Borriello G. SpotON: Anindoor 3D location sensing technology based on RF signal strength [J]. UW-CSE 00-02-02,University of Washington, Department of Computer Science and Engineering,Seattle, WA, February 2000.
[7] Hightower J, Vakili C, Borriello G, et al.Design and calibration of the spoton ad-hoc location sensing system[J]. UW CSE00-02-02,University of Washington, Department of Computer Science andEngineering, Seattle, WA, 2001.
[8] Ni L M, Li Y, Lau Y C, et al. LANDMARC: indoorlocation sensing using active RFID [J]. In Proceedings of the First IEEEInternational Conference on Pervasive Computing and Communications, 407-415,2003.
[9] Jin G, Lu X, Park MS. An indoor localizationmechanism using active RFID tag[C]. IEEE International Conference on SensorNetworks, Ubiquitous, and Trustworthy Computing, 1-4, 2006.
[10] Chattopadhyay A, Harish A R. Analysis of UHFpassive RFID tag behavior and study of their applications in low range indoorlocation tracking[C]. IEEE Antennas and Propagation Society InternationalSymposium, 1217-1220, June 2007.
[11] Chattopadhyay A, Harish A R. Analysis of lowrange Indoor Location Tracking techniques using Passive UHF RFID tags[C]. IEEERadio and Wireless Symposium, 351-354, 2008.
[12] Choi J S, Lee H, Elmasri R, et al.Localization systems using passive UHF RFID[C]. Fifth International JointConference on INC, IMS and IDC, 1727-1732, 2009.
[13] Zhao Y, Liu Y, Ni L M. VIRE: Active RFID-basedlocalization using virtual reference elimination[C].International Conference onParallel Processing, 10-14, 2007.
[14] Xu B, Gang W. Random sampling algorithm inRFID indoor location system[C]. In Third IEEE International Workshop onElectronic Design, Test and Aplications (DELTA), 168-176, 2006.
[15] Wang J S, Shen Z X. An improved MUSIC TOAestimator for RFID positioning[C]. IEEE Radar Conference, 478-482, 2002.

【本文為51CTO專欄作者“中國保密協會科學技術分會”原創稿件,轉載請聯系原作者】