機器人學會對自己下手了,螺絲松了自己擰
本文經AI新媒體量子位(公眾號ID:QbitAI)授權轉載,轉載請聯系出處。
機器人能夠對自己下手了:自己修自己!日本科學家教會機器人擰自己的螺絲。
人類用手一指,你這松了,機器人就操起家伙,眼一閉心一橫,對準自己

此外,機器人還可以操著自己的鋼鐵之手,日日對準自己,檢查一下螺絲有沒有松。

人類造出了機器人,機器人自己修理自己,聽起來像是科幻電影里的設定,接下來就會有能自我完善、自我維護的機器人大軍了……
如何讓機器人自己對自己精準下手
人疼了給自己貼個創口貼,或者抹個防曬霜很容易,但是機器人只能互相擼,因為它們不能「胳膊肘往里拐」,而且它們也不知道自己的螺絲是不是壞了。
因為它們只能判斷自己的”物理模型“和“數字模型”是否一致。
這么看起來機器人還是挺笨的?
所以如何讓機器人自己修自己呢?
首先,要讓TA能夠讓TA知道自己身上的螺絲松了
目前有兩個方法,
1.自檢:機器人通過關節動作異常發現螺絲松了。
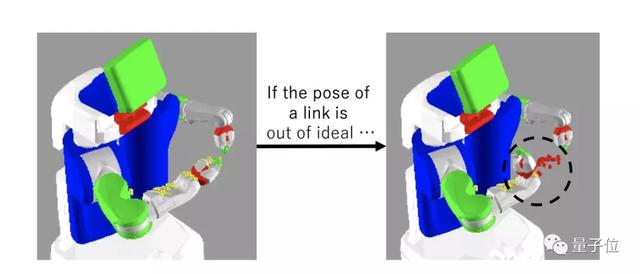
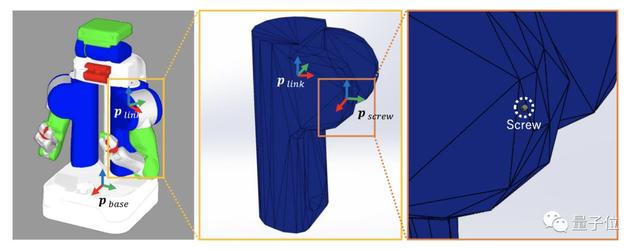
運用RGBD相機和關節處的編碼器,機器人發現圖中右邊的手腕角度出現了異常。紅色的虛線表示手本來應該在的地方。
2.人檢:這個方法就很簡單粗暴,人手指或者說一聲“這里有個松螺絲了”,機器人就能反應出來。

然后,機器人要計算一下松螺絲的準確位置
科學家用一個算法來進行地毯式掃描,掃描出外殼上哪些部位屬于螺絲
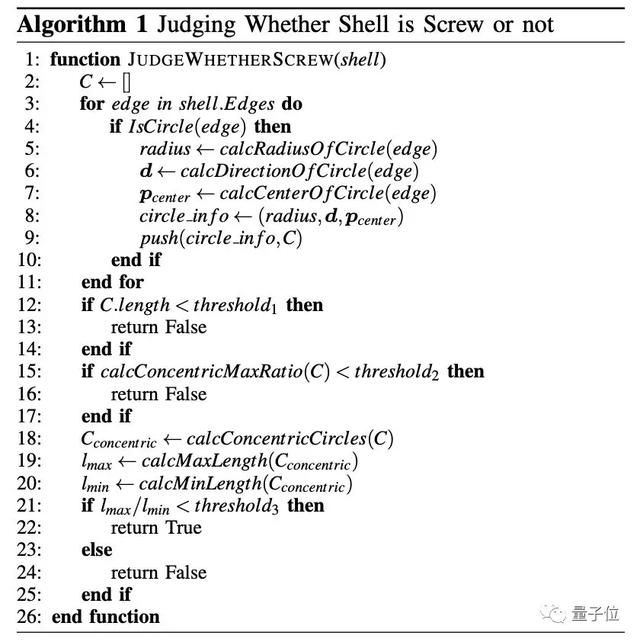
掃描的結果:紅色的部分就是螺絲了。
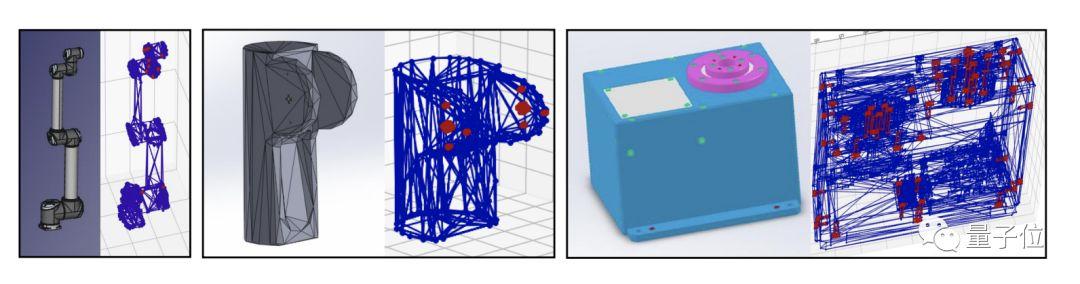
再通過CADdata,運用坐標系,精準定位到需要操作的地方。
最后,機器人要突破關節運動極限,握著螺絲刀對著自己動手
有些螺絲會在細小關節處,機器人按照原來的運動方向,就會關節受限。這時候它需要能夠“反向運動”。
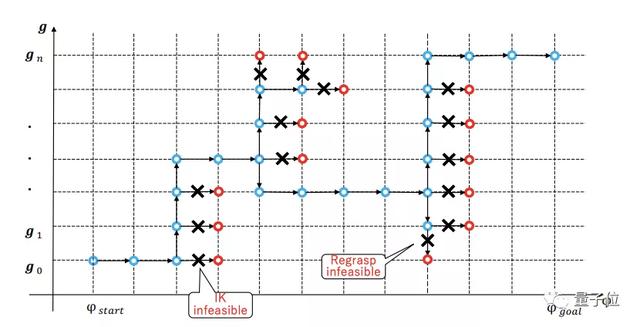
機器人會先檢查一個動作,如果需要轉動的角度超過了極限,它再嘗試下一個動作。
演示一下,機器人看起來往自己的“脖子”處上了個螺絲,成功釘了個掛鉤。然后科學家就立刻利用起來,把布袋掛了上去。
科學家表示,這個功能就是,當機器人兩只手不夠用的時候,它就可以自己給自己加一個硬件了。現在它就模仿人類,給自己肩膀上背了個包。
PR2機器人
這次用到的PR2機器人來自Willow Garage的第二代機器人。所有軟件代碼依托于ROS開源。
它有兩個7個關節的手臂,有效載荷為1.8千克。傳感器包括5百萬像素的攝像頭,一個傾斜的激光測距儀和一個慣性測量、以及觸覺傳感器。
它之前可以疊毛巾
還可以跑到插座前,拔出插頭,給自己充電續航

現在它可以自己修自己了,有的網友覺得,離科幻電影里危險的機器人越來越近了。
但是我們覺得,目前只是給自己擰個螺絲,還不用擔心,倒是它能成為人類更好的助手了,你覺得呢?
參考鏈接:
https://spectrum.ieee.org/tech-talk/semiconductors/materials/artificial-skin-can-feel-and-heal
https://takayuki5168.github.io/projects/papers/2019/humanoids2019_screw.pdf