足式機器人何必非得四條腿!機器人該長啥樣,MIT讓計算機「立規矩」
本文轉自雷鋒網,如需轉載請至雷鋒網官網申請授權。
談起學英語,很多人最為頭疼的便是兩個字——語法(grammar)。
其實,不僅英文有語法,任何語言都需要語法,作為語言學(Linguistics)的一個分支,它是語言的行文法則。
給詞、短語、句子立規矩,一門語言則有了基礎;同理,設計機器人也需要規則,就比如機器人在穿越某種地形時,其形態如何極為關鍵。
想象一下,要設計一個會爬樓的機器人,它應該像人一樣有兩條腿,還是像螞蟻一樣有六條腿呢?
要想知道何種形態爬樓效果最佳,最直接的方式是把每一種可能的方案都嘗試一遍,但這種方法自然耗時耗力。
基于此,美國麻省理工學院(MIT)有了給機器人制定「語法」的想法——開發一種名為 RoboGrammar 的計算機系統。
機器人長什么樣,就讓計算機來決定吧!
計算機如何設計機器人?
1967 年,SIGGRAPH(Special Interest Group for Computer GRAPHICS,計算機圖形圖像特別興趣小組)成立,其關注點主要在于計算機繪圖和動畫制作軟硬件技術。
1974 年起,SIGGRAPH 開始舉辦年會,為眾多計算機圖像技術軟硬件廠商的最新研究成果提供一個展示的機會,SIGGRAPH 年會上的展品常被媒體稱為是圖像的未來。
比如在 SIGGRAPH 2017 上,NVIDIA 展示了 VR 相關技術、Intel 展示了在電影《敦刻爾克》的拍攝中提供的技術支持。
SIGGRAPH 2020(Asia)上,有關 MIT RoboGrammar 系統的研究成果公布。

其論文題為 RoboGrammar: Graph Grammar for Terrain-Optimized Robot Design(機器人語法:基于地形優化機器人設計的圖形語法),這也直接點明了 RoboGrammar 的主要側重點:地形。
實際上,MIT 研究團隊的初心在于創新機器人的形態,以達到最佳性能。
論文第一作者、MIT 計算機科學與人工智能實驗室(CSAIL)博士生 Allan Zhao 認為,設計機器人的目的可以說是幾乎無窮無盡的,但它們在總體形態設計上都比較相似:
當你想制造一個需要穿越復雜各種地形的機器人時,你腦海中可能會立刻跳出一只四足機器狗,但我們想知道這是否真的是最佳設計。

研究團隊設計的 RoboGrammar 系統作為一種自動化的方法,主要用于生成優化的機器人結構。
要打造機器人,首先計算機需要知道兩方面信息:一是車間里有哪些零件(輪子、關節等)可用,即下圖中的 components;二是機器人未來要存在于哪種環境下(樓梯、平坦區域或光滑表面,或是幾種地形的組合等),即 terrains。
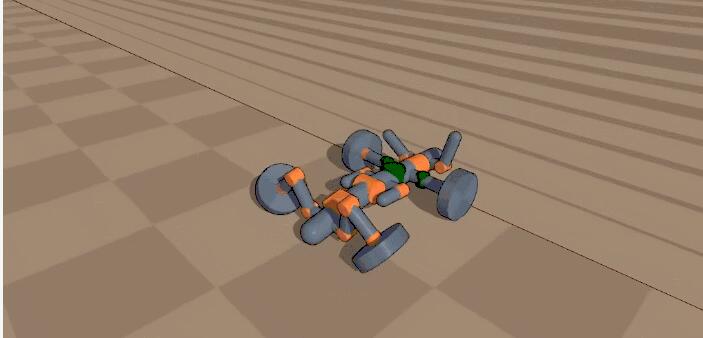
例如在摩擦系數僅為 0.05 的結冰湖面上,機器人的形態可以是這樣的。
再例如類似這樣的組合地形。
基于兩方面信息,接下來的工作就可以完全交給 RoboGrammar 系統了。
系統中,機器人組件的所有排列方式通過圖形語法(graph grammar)來表示,隨后可能會形成數十萬個機器人的形態設計(grammar generated structures),都用一幅圖表示。
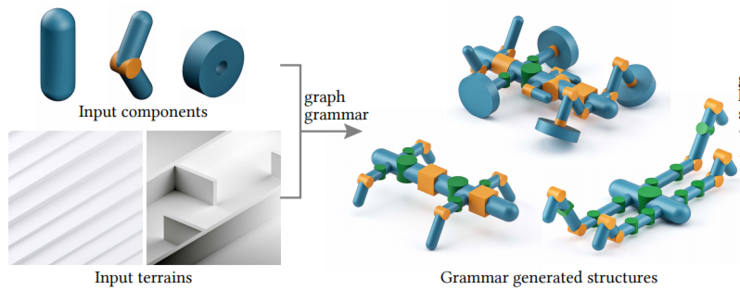
也就是說,每種設計都對應著一個語法規則序列,而這種語法規則主要受到自然界中節肢動物的啟發。
機器人的哪種形態最佳?
有了語法規則,針對特定地形,系統已經生成了多樣的排列組合。但正如 Allan Zhao 所言:
語法創造的只是數量,并非機器人的最佳形態。
那么,哪種形態最佳呢?
帶著這個問題,RoboGrammar 系統開始了關鍵一步——自動檢索適用于地形的性能最佳機器人及其相應的控制器。
所謂控制器,是指一組能為機械結構真正賦予生命的指令,它將控制機器人各個馬達的運動順序,在論文中,控制器的算法被稱為是「模型預測控制」(Model Predictive Control),在這一算法中,快速向前移動的優先級最高。
當每個機械結構被賦予生命后,計算機就會通過被稱為「圖形啟發式搜索」(Graph Heuristic Search) 的神經網絡算法來檢索高性能機器人。
作為一種新型的組合設計空間的高效搜索方式,Graph Heuristic Search 使得計算機在探索設計空間的同時學習函數,該函數能將不完整的設計(如組合搜索樹中的節點)映射到通過擴展這些不完整的設計實現的最佳性能值。
值得一提的是,Graph Heuristic Search 優先探索的是設計空間中那些最有希望的分支。
為進一步測試 Graph Heuristic Search, 研究人員特意設定了多種對于機器人來說具有挑戰性的地形。結果證明,不論是單一地形還是地形組合,RoboGrammar 都能生成性能最佳的機器人。
而上述所有步驟都發生在工程師拿起螺絲釘之前。
Allan Zhao 表示:
目前為止,機器人設計仍然是一個非常“手工”的過程,而我們的 RoboGrammar 則是一種更新穎的、更有創意的機器人設計方法,它可能會更高效。
機器人研究權威專家、美國哥倫比亞大學教授 Hod Lipson 對這項研究成果的評價則是:
這項工作是 25 年來在自動設計機器人形態和控制方面的最高成就。使用圖形語法的想法已經出現一段時間了,但是還沒有哪個團隊能像這樣完美地實現了這一想法。
正如很多科學領域一樣,機器人的未來還有很大的想象空間,期待 MIT 這一創新想法的后續進展。