PyTorch可視化工具:TensorBoard、Visdom
一、TensorBoard
TensorBoard 一般都是作為 TensorFlow 的可視化工具,與 TensorFlow 深度集成,它能夠展現(xiàn) TensorFlow 的網(wǎng)絡(luò)計(jì)算圖,繪制圖像生成的定量指標(biāo)圖以及附加數(shù)據(jù)等。
此外,TensorBoard 也是一個(gè)獨(dú)立工具,在 PyTorch 中也可使用它進(jìn)行可視化。
1、安裝:pip install tensorboard
2、啟動(dòng):tensorboard --logdir="日志目錄"
啟動(dòng) tensorboard 時(shí),可指定 logdir、port(默認(rèn)6006)、host(默認(rèn)localhost)等參數(shù):
- usage: tensorboard [-h] [--helpfull] [--logdir PATH] [--logdir_spec PATH_SPEC]
- [--host ADDR] [--bind_all] [--port PORT]
- [--purge_orphaned_data BOOL] [--db URI] [--db_import]
- [--inspect] [--version_tb] [--tag TAG] [--event_file PATH]
- [--path_prefix PATH] [--window_title TEXT]
- [--max_reload_threads COUNT] [--reload_interval SECONDS]
- [--reload_task TYPE] [--reload_multifile BOOL]
- [--reload_multifile_inactive_secs SECONDS]
- [--generic_data TYPE]
- [--samples_per_plugin SAMPLES_PER_PLUGIN]
- [--debugger_data_server_grpc_port PORT]
- [--debugger_port PORT] [--master_tpu_unsecure_channel ADDR]
3、Tensorboard 可視化演示(PyTorch 框架):
訓(xùn)練模型,導(dǎo)入 tensorboard. SummaryWriter 保存 loss、accuracy 等日志信息。
- # 導(dǎo)入SummaryWriter
- from torch.utils.tensorboard import SummaryWriter
- ...
- # 創(chuàng)建SummaryWriter實(shí)例,指定log_dir的位置
- summaryWriter = SummaryWriter(log_dir="/Users/liyunfei/PycharmProjects/python3practice/06DL/fcnn/logs")
- ...
- # 模型訓(xùn)練時(shí),寫入train_loss、test_loss、score等信息
- summaryWriter.add_scalars("loss", {"train_loss_avg": train_loss_avg, "test_loss_avg": test_loss_avg}, epoch)
- summaryWriter.add_scalar("score", score, epoch)
啟動(dòng) TensorBoar ,訓(xùn)練過程可視化。
1)啟動(dòng)命令:
- tensorboard --logdir=/Users/liyunfei/PycharmProjects/python3practice/06DL/fcnn/logs
2)啟動(dòng)成功如圖示:

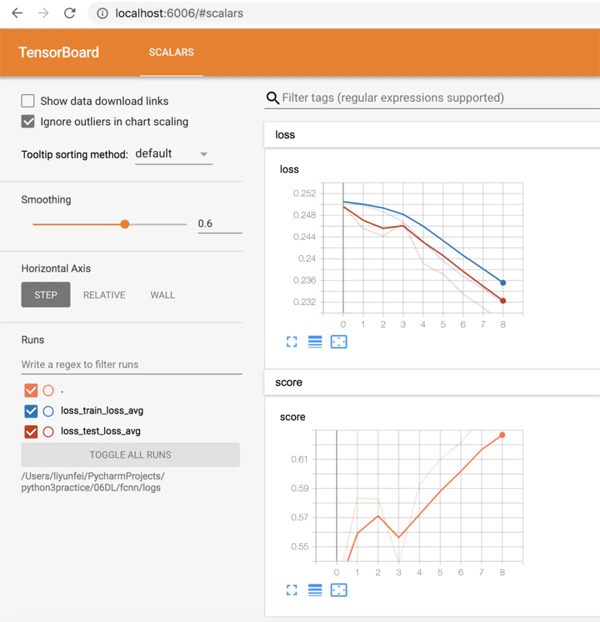
3)可視化結(jié)果如下:
二、Visdom
Visdom 是 Facebook 專門為 PyTorch 開發(fā)的一款可視化工具,能夠支持“遠(yuǎn)程數(shù)據(jù)”的可視化,支持 Torch 和 Numpy。GitHub 地址:https://github.com/fossasia/visdom
1、安裝:pip install visdom
2、啟動(dòng):
- python -m visdom.server
-m 是以模塊服務(wù)啟動(dòng)
- 如果是 linux/mac-os 環(huán)境,可以使用以下命令啟動(dòng)運(yùn)行在后臺(tái)
nohup python -m visdom.server &
啟動(dòng) Visdom 時(shí),可以指定 port(默認(rèn)8097)、hostname(默認(rèn)localhost)等其它參數(shù):
- usage: server.py [-h] [-port port] [--hostname hostname] [-base_url base_url]
- [-env_path env_path] [-logging_level logger_level]
- [-readonly] [-enable_login] [-force_new_cookie]
- [-use_frontend_client_polling]
3、Visdom 可視化演示
1)啟動(dòng) Visdom:
python -m visdom.server -port 8097
2)啟動(dòng)成功如下:

3)訓(xùn)練過程可視化代碼:
- # 導(dǎo)入visdom包
- import visdom
- # 創(chuàng)建Visdom對(duì)象,連接服務(wù)端,指定env環(huán)境(不指定默認(rèn)env="main")
- viz = visdom.Visdom(server='http://localhost', port=8097, env='liyunfei')
- ...
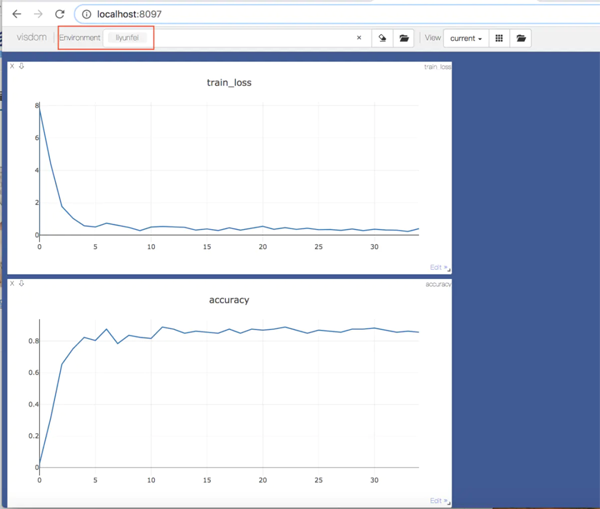
- viz.line([0.], [0], win='train_loss', opts=dict(title='train_loss'))
- viz.line([0.], [0], win='accuracy', opts=dict(title='accuracy'))
- ...
- # 模型訓(xùn)練時(shí),實(shí)時(shí)可視化loss、accuracy等信息。
- viz.line([train_loss_avg], [epoch], win='train_loss', update='append')
- viz.line([accuracy], [epoch], win='accuracy', update='append')
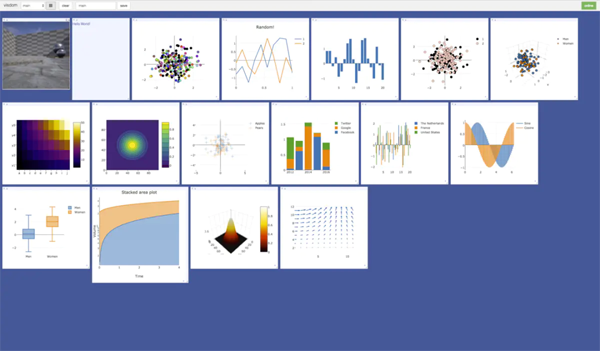
4)可視化結(jié)果:
5)其它操作——可視化一張/多張圖片:
示例:
- import visdom
- import numpy as np
- viz = visdom.Visdom(server='http://localhost', port=8097, env='liyunfei')
- # 一張圖片
- viz.image(
- np.random.rand(3, 512, 256),
- opts=dict(title='Random!', caption='How random.'),
- )
- # 多張圖片
- viz.images(
- np.random.randn(20, 3, 64, 64),
- nrow=5,
- opts=dict(title='Random images', caption='How random.')
- )
效果:
6)Visdom 的更多可視化 API(常用的是 line、image、text):
- vis.scatter : 2D 或 3D 散點(diǎn)圖
- vis.line : 線圖
- vis.stem : 莖葉圖
- vis.heatmap : 熱力圖
- vis.bar : 條形圖
- vis.histogram: 直方圖
- vis.boxplot : 箱型圖
- vis.surf : 表面圖
- vis.contour : 輪廓圖
- vis.quiver : 繪出二維矢量場(chǎng)
- vis.image : 圖片
- vis.text : 文本
- vis.mesh : 網(wǎng)格圖
- vis.save : 序列化狀態(tài)