Linux下簡單幾步安裝AI開發環境-ROS(超有意思)
一口君機緣巧合,接觸到了一個開源的項目ROS,只需要根據本文操作,就可以很容易搭建一個具有3d效果的開發環境,非常有意思,和大家分享下。
0、什么是ROS
ROS(Robot Operating System,下文簡稱“ROS”)是用于編寫機器人軟件程序的一種具有高度靈活性的軟件架構,是一個開源的元操作系統。ROS的原型源自斯坦福大學的STanford Artificial Intelligence Robot (STAIR) 和 Personal Robotics (PR)項目。
它提供了操作系統應有的服務,包括硬件抽象,底層設備控制,常用函數的實現,進程間消息傳遞,以及包管理。它也提供用于獲取、編譯、編寫、和跨計算機運行代碼所需的工具和庫函數。
ROS設計者將ROS表述為“ROS = Plumbing + Tools + Capabilities + Ecosystem”,即ROS是通訊機制、工具軟件包、機器人高層技能以及機器人生態系統的集合體 。
1. ROS安裝
ROS Kinetic 只 支持Wily (Ubuntu 15.10), Xenial (Ubuntu 16.04) 和Jessie (Debian 8) 的debian包。ubuntu 16.04安裝,請參考文章《linux環境搭建-ubuntu16.04安裝》
1.1 配置Ubuntu軟件倉庫
配置你的Ubuntu軟件倉庫(repositories)以允許使用“restricted”“universe”和“multiverse”存儲庫。你可以根據Ubuntu軟件倉庫指南來完成這項工作。
1.2 設置sources.list
設置電腦以安裝來自packages.ros.org的軟件。
打開終端,輸入以下命令:
- sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
若下載速度緩慢,推薦就近選擇一個鏡像源替換上面的命令。例如,Tsinghua University為:
- sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
如果依舊遇到連接問題,請嘗試為Ubuntu apt換源(非ROS網站)。
1.3 設置密鑰
- sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
若無法連接到密鑰服務器,可以嘗試替換上面命令中的 hkp://keyserver.ubuntu.com:80 為 hkp://pgp.mit.edu:80 。
你也可以使用curl命令替換apt-key命令,這在使用代理服務器的情況下比較有用:
- curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -
1.4 安裝
首先,確保你的Debian軟件包索引是最新的:
- sudo apt-get update
在ROS中,有很多不同的庫和工具。我們提供了默認的配置來開始。你也可以單獨安裝ROS包。
如果以下步驟出現問題,可以使用以下存儲庫,而不是上面提到的那些ros-shadow-fixed
桌面完整版: (推薦) : 包含ROS、rqt、rviz、機器人通用庫、2D/3D 模擬器、導航以及2D/3D感知
- sudo apt-get install ros-kinetic-desktop-full

實際操作可能會出錯,多試幾次即可。
1.5 初始化 rosdep
在開始使用ROS之前你還需要初始化rosdep。rosdep可以方便在你需要編譯某些源碼的時候為其安裝一些系統依賴,同時也是某些ROS核心功能組件所必需用到的工具。
- sudo rosdep init

但是初始化經常會失敗, 解決方法:
- sudo su
- sudo gedit /etc/hosts
在hosts中添加以下內容并保存,在執行完后繼續rosdep update
- 199.232.28.133 raw.githubusercontent.com
- 151.101.228.133 raw.github.com
在此執行 sudo rosdep init

1.6 更新 rosdep
該步驟可以不執行,如果需要更新rosdep ,可以執行以下命令:
- rosdep update
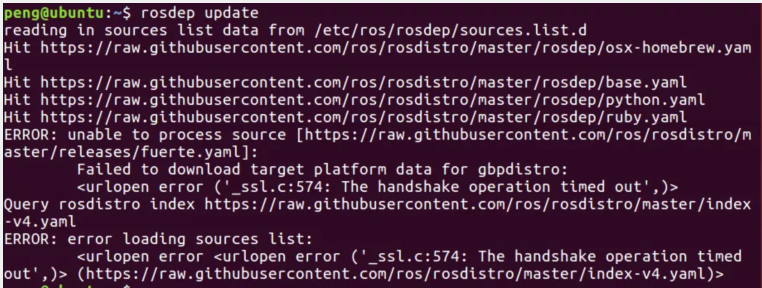
但是由于服務器不穩定,通常需要多試幾次,
或者直接直接下載對應的更新文件UAV_ROS.tar,拷貝到ubuntu中,
然后拷貝到/etc/ros/rosdep/下
- cd ~/ros
- sudo cp * /etc/ros/rosdep/
2. 編譯
1. 下載demo的解壓包hw_1,并解壓
- tar zxvf hw_1.tar
2. 創建工作空間
Ctrl+alt+t,打開終端,復制并逐條運行以下命令
- mkdir -p ~/catkin_ws/src
- cd ~/catkin_ws/src
之后將 hw_1/src 中的三個文件夾復制到/catkin_ws/src 路徑下:
- cp ~/hw_1/src/* ~/catkin_ws/src -r
- cd ~/catkin_ws/src
繼續在終端執行命令:
- catkin_init_workspace
- cd ~/catkin_ws/
- catkin_make
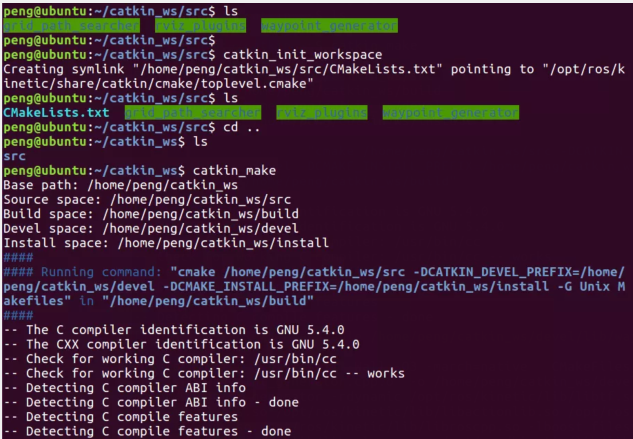
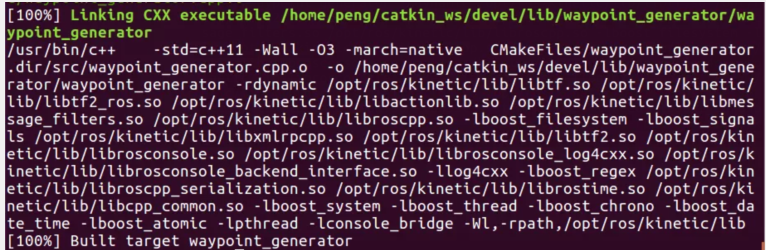
成功!
聲明環境變量:
- source devel/setup.bash
3. 打開 rviz
在終端執行命令
- roscore
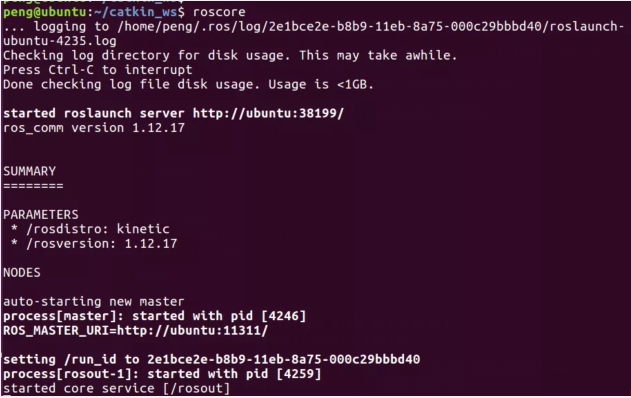
ctrl+shift+t,打開新一頁終端,執行以下命令
- rviz
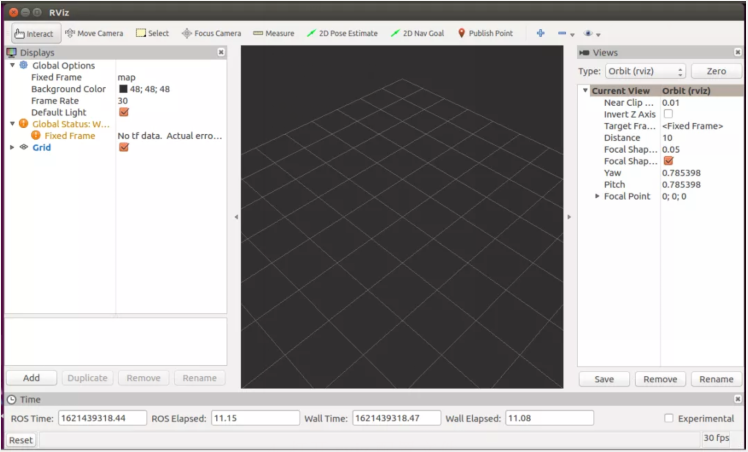
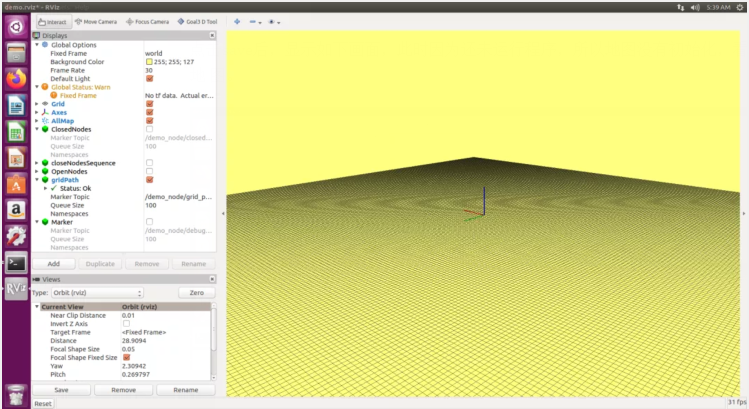
顯示出 rviz 初始頁面
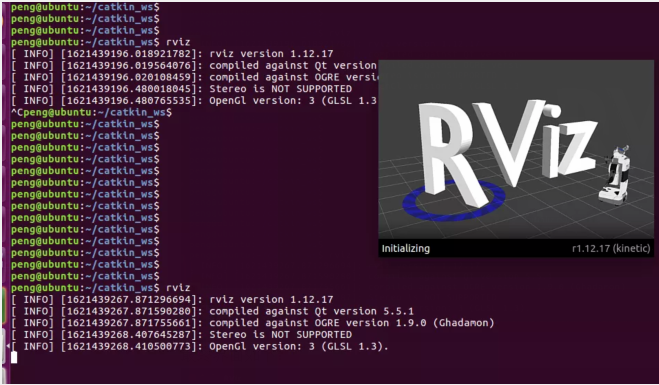
最終界面如下:
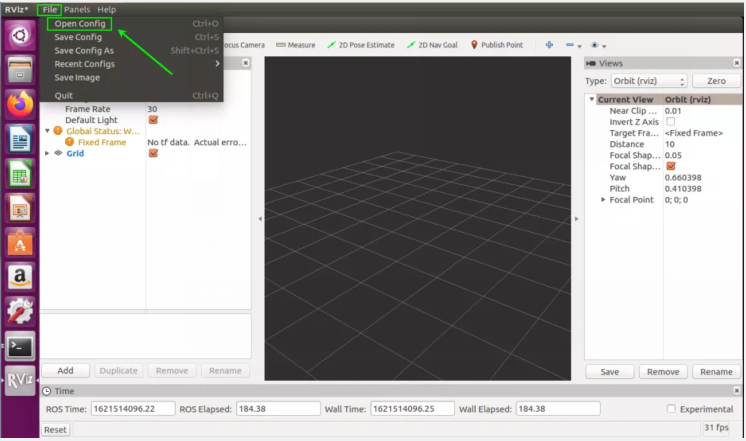
4. 打開 rviz 配置文件
鼠標放在左上方,點擊添加配置文件(open Config),
配置文件路徑為:
- ~/catkin_ws/src/grid_path_searcher/launch/rviz_config/demo.rviz
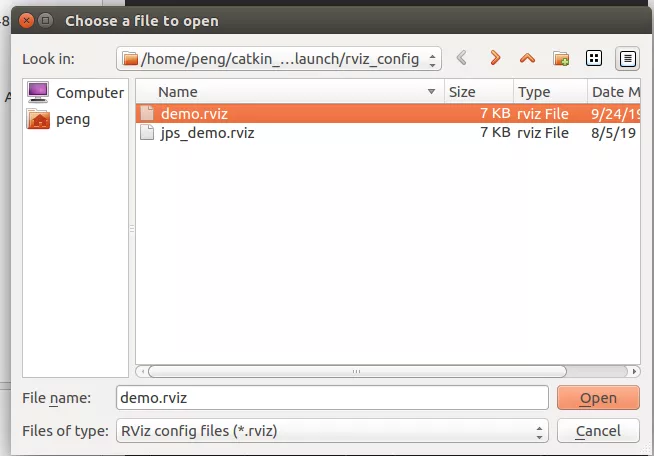
點擊open,進入下面對話框:
點擊save后,顯示如下畫面,此時因為還未運行程序,所以地圖沒有初始化,看不到點云三維地 圖。
5. 運行程序,載入地圖
ctrl+shift+t,打開新一頁終端,執行以下命令
- cd ~/catkin_ws
- source devel/setup.bash
- roslaunch grid_path_searcher demo.launch
畫面切到 rivz,可以看到,程序自動載入了點云地圖
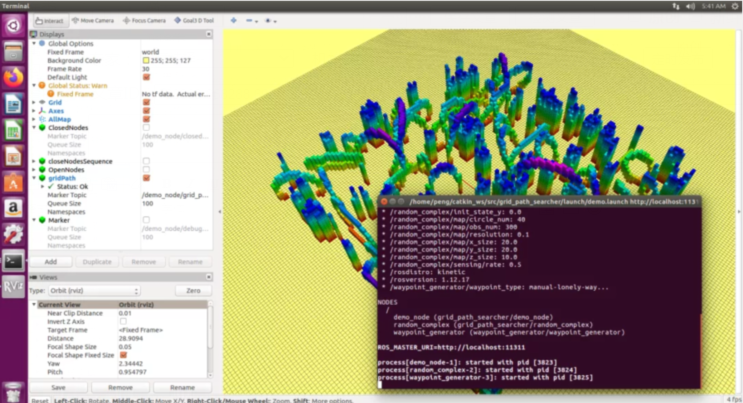
成功!