













訓練大模型也不怕,輕量級TorchShard庫減少GPU內存消耗,API與PyTorch相同
模型并行性能夠促進視覺任務的性能。但是目前,還沒有一個標準庫可以讓我們像采用混合精度等其他 SOTA 技術那樣輕松地采用模型并行性。
最近,馬里蘭大學帕克分校計算機科學系的研究者 Kaiyu Yue 開源了一個工具TorchShard,這是一個輕量級的引擎,用于將 PyTorch 張量切片成并行的 shard。當模型擁有大量的線性層(例如 BERT、GPT)或者很多類(數百萬)時,TorchShard 可以減少 GPU 內存并擴展訓練規模,它具有與 PyTorch 相同的 API 設計。

項目地址:https://github.com/KaiyuYue/torchshard
BERT 和 GPT 等超大模型正在成為 NLP 領域應用中的趨勢。然而訓練這種大模型面臨內存限制的問題,為了解決這個難題,研究者使用 Megatron-LM 和 PyTorch-Lightning 模型并行性擴大訓練。其中,Megatron-LM 只專注于大規模訓練語言模型,而 PyTorch-Lightning 僅基于 sharded 優化器狀態和梯度,如 DeepSpeed。
在計算機視覺任務中,我們會在訓練基于 Transformer、MLP 模型或在數百萬個類中訓練模型時遇到同樣的問題。TorchShard 的目標是:
- 建立一個標準的 PyTorch 擴展庫,用于使用模型并行性進行擴展訓練;
- 以一種簡單、自然的方式使用 PyTorch。
TorchShard 是對模型并行單元(mpu)的徹底重寫,是 Megatron-LM 核心。最重要的是,TorchShard 具有與 PyTorch 相同的 API 設計,這意味著所有的子類和子函數都保持與 PyTorch 相同。例如,如果你想讓原來的線性層 torch.nn. linear 是并行的,只需將 torch 變成 ts,并調用帶有 dim 參數的子類 nn.ParallelLinear,如下所示:
- import torchshard as ts
- ts.init_process_group(group_size=2) # init parallel groups
- m = torch.nn.Sequential(
- torch.nn.Linear(20, 30, bias=True),
- ts.nn.ParallelLinear(30, 30, bias=True, dim=None), # equal to nn.Linear()
- ts.nn.ParallelLinear(30, 30, bias=True, dim=0), # parallel in row dimension
- ts.nn.ParallelLinear(30, 30, bias=True, dim=1), # parallel in column dimension
- ).cuda()
- x = m(x) # forward
- loss = ts.nn.functional.parallel_cross_entropy(x, y) # parallel loss function
- loss.backward() # backward
- torch.save(
- ts.collect_state_dict(m, m.state_dict()), 'm.pt') # save model state
除此之外,TorchShard 還支持與 DDP 一起使用時的各種特性,保存和加載 shard checkpoints,初始化 shard 參數,以及跨多臺機器和 GPU 處理張量。具體如下:
- torchshard 包含必要的功能和操作,如 torch 包;
- torchshard.nn 包含圖形的基本構建塊,如 torch.nn 包;
- torchshard.nn.functional 包含 torchshard.nn 的相應功能操作,如 torch.nn.functional 包;
- torchshard.distributed 包含處理分布式張量和組的基本功能,如 torch.distributed 包更容易使用。
如何開始 TorchShard?
安裝要求:Python 版本 3.6 以上(含)以及 PyTorch 版本 1.9.0 以上(含)。通過 pip 安裝 TorchShard 庫:
- pip install torchshard
這里以 ImageNet 上訓練 ResNet-50 為例,展示僅需幾行代碼就能在項目中使用 TorchShard。通常 ResNet-50 設計范式包含兩部分:卷積塊和全連接層,如下圖 1 所示。一般來說,由于大量的類依賴于數據集,最后的線性層比卷積塊有更多的參數。所以我們切片最后一個線性層來檢查其最大尺寸。
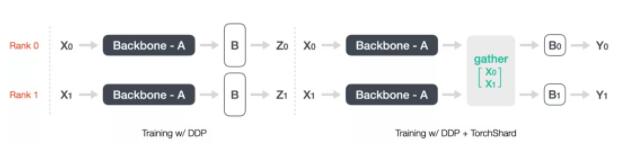
圖 1:DDP 以及 DDP + TorchShard 前向訓練流。
在上圖 1 中,左邊展示了傳統的 DDP 訓練范式。假設我們有兩個等級,DDP 將強制每個等級有重復的模型參數。然而,TorchShard 會將層級參數切片到不同的等級,從而減少整個 GPU 內存。現在向 ImageNet 官方訓練腳本添加一些代碼,修改后的版本已經成為 TorchShard 項目的一部分。
首先將 torchshard import 進來:
- import torchshard as ts
然后需要初始化模型并行的進程組,就像初始化 DDP 進程組的方法一樣。只需要設置一個功能參數來告訴 torchshard 應該從目標層中切片出多少個 shard。
- ts.distributed.init_process_group(group_size=args.world_size)
接下來將模型轉換為并行版本,其中可以直接將整個模型輸入到轉換輔助函數中,無需特殊處理。
- import resnet
- model = resnet.__dict__[args.arch](pretrained=args.pretrained)
- ts.nn.ParallelLinear.convert_parallel_linear(
- model, dim=args.model_parallel_dim
- )
- print("=> paralleling model'{}'".format(args.arch))
此外,不要忘記損失函數 torchshard.nn.ParallelCrossEntropy ,該損失函數可以根據輸入張量在原始 PyTorch 版本和并行版本之間切換運行模式。例如,如果輸入張量是由 torchshard 并行層產生的,torchshard.nn.ParallelCrossEntropy 將以并行方式計算損失值。
- criterion = ts.nn.ParallelCrossEntropyLoss().cuda(args.gpu)
當模型并行模式(TorchShard)和數據并行模式(DDP)一起工作時,我們需要處理并行層的輸入。每個等級中的參數和訓練數據都不同。因此,我們在 ResNet forward 中的并行線性層之前收集輸入張量。
- x = ts.distributed.gather(x, dim=0) # gather input along the dim of batch size
- x = self.fc(x)
同樣地,我們在計算損失值之前收集目標張量。
- output = model(images)
- if args.enable_model_parallel:
- target = ts.distributed.gather(target, dim=0)
- loss = criterion(output, target)
最后,使用 TorchShard 函數保存和加載 checkpoints 非常簡單。TorchShard 提供了名為 torchshard.collect_state_dict 基本函數用于保存 checkpoints,torchshard.relocate_state_dict 用于加載 checkpoints。
保存檢查點:
- state_dict = model.state_dict()
- # collect states across all ranks
- state_dict = ts.collect_state_dict(model, state_dict)
- if ts.distributed.get_rank() == 0:
- torch.save(state_dict, 'resnet50.pt') # save as before
加載檢查點:
- if ts.distributed.get_rank() == 0:
- state_dict = torch.load('resnet50.pt')
- # relocate state_dict() for all ranks
- state_dict = ts.relocate_state_dict(model, state_dict)
- model.load_state_dict(state_dict) # load as before
現在我們已經完成了在 ImageNet 上為 shard 訓練添加代碼, 然后可以通過增加類的數量來擴展它,即最后一個線性層的輸出特征維度。訓練腳本可以在 torchshard/project/imagenet 中找到。下圖展示了在 8 個 NVIDIA TITAN-XP (12196 MiB) GPU 、類數 ≤ 1000000 上和 16 個 GPU 、類數為 2000000 上訓練 ResNet-50 擴展能力。
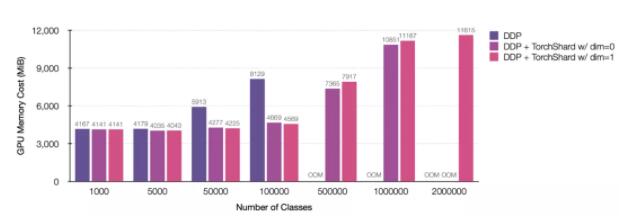
圖 2:在不同并行策略下使用標準 ResNet 訓練設置(即輸入大小 224 和批量大小 256)的 GPU 內存成本。
使用 AMP 與 ZeRO
TorchShard 以簡單自然的 PyTorch 方式與其他技術(例如自動混合精度 AMP 以及 ZeRO)一起混合使用。
- # gradscaler
- scaler = torch.cuda.amp.GradScaler(enabled=args.enable_amp_mode)
- with torch.cuda.amp.autocast(enabled=args.enable_amp_mode): # compute output
- output = model(images)
- if args.enable_model_parallel:
- target = ts.distributed.gather(target, dim=0)
- loss = criterion(output, target)
- # compute gradient and do SGD step
- scaler.scale(loss).backward()
- scaler.step(optimizer)
- scaler.update()
- optimizer.zero_grad()
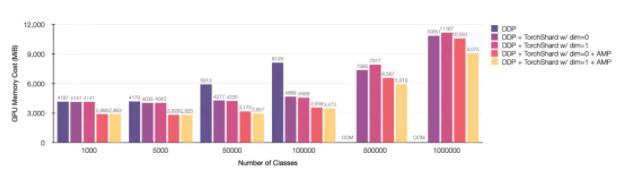
圖 3:在不同并行策略以及 AMP 下,使用標準的 ResNet 訓練設置時(輸入尺寸 224,batch 大小 256),使用 GPU 內存的成本。
ZeRO 是 DeepSpeed 的核心,與 PyTorch >= 1.9.0 一起使用。如果你想測試一個函數,請安裝最新版本的腳本來運行,代碼如下:
- from torch.distributed.optim import ZeroRedundancyOptimizer
- if args.enable_zero_optim:
- print('=> using ZeroRedundancyOptimizer')
- optimizer = torch.distributed.optim.ZeroRedundancyOptimizer(
- model.parameters(),
- optimizer_class=torch.optim.SGD,
- lr=args.lr,
- momentum=args.momentum,
- weight_decay=args.weight_decay)
- else:
- optimizer = torch.optim.SGD(model.parameters(), args.lr,
- momentum=args.momentum,
- weight_decay=args.weight_decay)
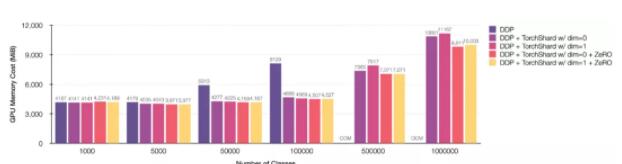
圖 4:在不同的并行策略和 ZeRO 優化器下,在標準 ResNet 訓練設置(輸入大小 224 和批大小 256)的 GPU 內存成本。
此外,TorchShard 還提供了基本的 Python API 以及和相應的模板文件,以簡化自定義并行層的實現。
研究者將持續開發 TorchShard,如 TorchShard 下一個特性是新的數據采樣器 torchshard.utils.data.DistributedGroupSampler,它的命名遵循 torch.utils.data.DistributedSampler。該采樣器旨在幫助用戶構建 M-way 數據并行、N-way 模型并行,使得其就像 DDP 中的 DistributedSampler 一樣簡單。用戶唯一要做的就是設置模型并行組號,然后 DistributedGroupSampler 來確保同一模型并行組中的模塊具有相同的訓練數據。






















