













HarmonyOS開發板試用之一組裝Wi-Fi_IoT_Hi3861開發板小車
簡述
很幸運被51cto抽中試用HiSpark_Wi-Fi_IoT_Hi3861_CH340G的機會。關注鴻蒙也有一段時間了但是一直沒有時間去系統的學習研究下,借這次機會正好學習下鴻蒙硬件方面的開發。本篇主要介紹下開發套件的硬件組裝。

注:相關設備來源于51CTO鴻蒙技術社區【開發板漂流計劃】提供
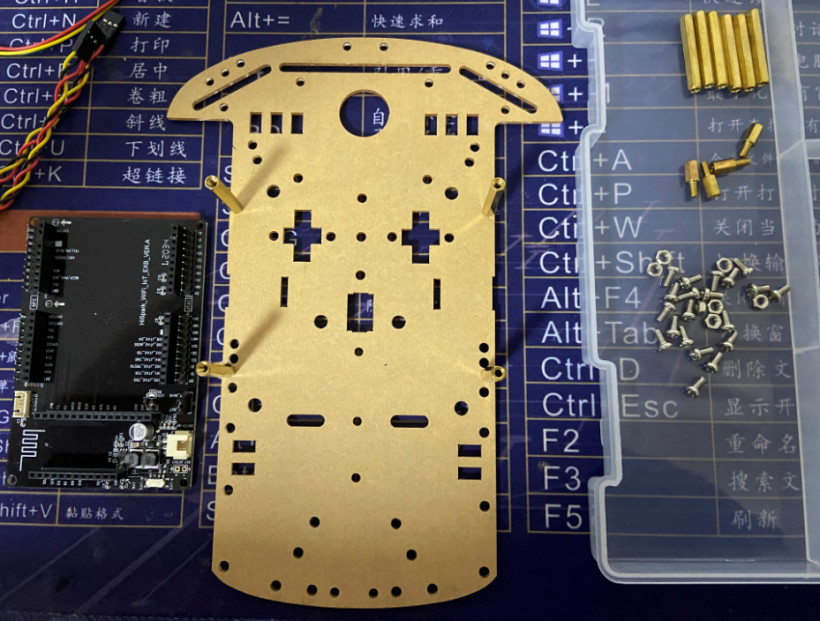
套件全家桶
打開HarmonyOS開發板套件包裝可以看到配套齊全而且螺絲和螺絲也是按類別分包包裝避免用錯螺絲的問題。
套件產品

注:相關設備來源于51CTO鴻蒙技術社區【開發板漂流計劃】提供
套件優點
- 套件配套齊全完整
- 電路板做工還可以
- 主板內嵌USB轉串口省去外接轉換頭
套件缺點
- 螺絲和螺母的用材上有待提升安裝的過程部分不容易安裝緊實,自攻絲容易滑絲
- 螺母的做工有點尷尬沒有開螺紋

套件組裝
剛接觸這個其實組裝還是滿費勁的,主要不知道如何下手,對照文檔(B站有官方的安裝視頻)裝個兩三個小時最終成功運行還去蠻激動的。所有的安裝都是基于小車底板進行組裝的。

1.安裝通用底板螺柱
首先在配件中找到小車底座(因為貼紙不好摳就沒有摳感覺這樣更容易看清底座上的孔),在底座左右兩側最邊邊有四個孔用來固定長螺柱(共10個長螺柱4個用來固定通用底板2個用來固定尋跡2個用來固定舵機2個用來固定NFC板),后期用來固定通用底板的。
2.安裝電機馬達
找到馬達固定支架和螺絲,將支架卡在小車底座上固定住馬達,再用螺絲傳過支架和碼進行固定。

固定時候需要注意\color{#f00}{馬達的紅線靠近底座}馬達的紅線靠近底座,因為這樣和小車的出廠程序運行方向對應,不然小車運行方向會相反,當然后期自己燒自己的程序,方向就有自己定了。
3.安裝輪胎和萬向輪
固定好馬達后就可以安裝兩個輪胎,插在馬達上即可,不知道是我安裝的問題還是,感覺輪胎看著有點歪……
然后在底座尾部用萬向輪(橫向方)找下四個孔的位置,給這四個孔裝上四個短的螺柱,并用螺絲將萬向輪固定在上面。
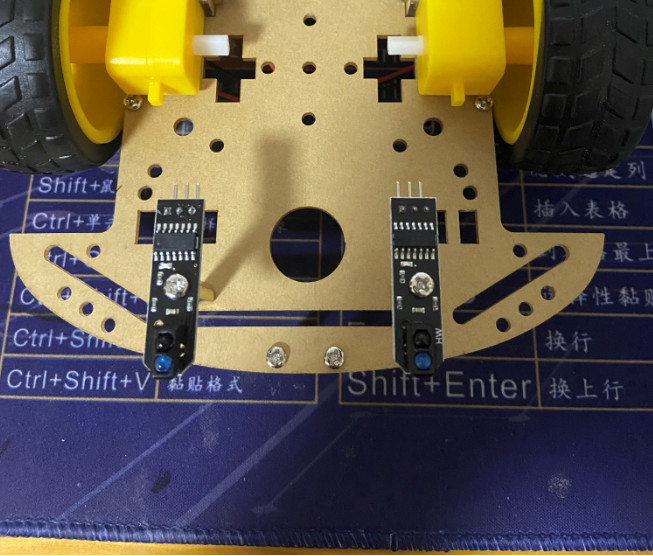
4.安裝尋跡和舵機
尋跡和舵機都在車頭位置,尋跡在車底用2個長螺柱固定。
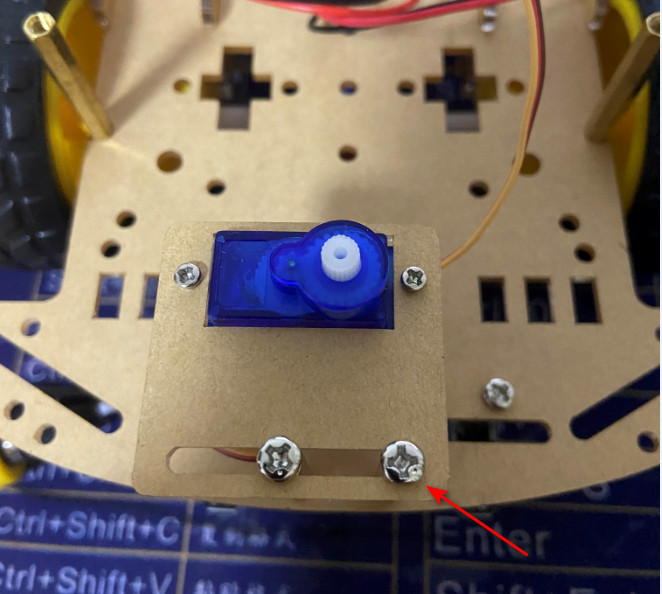
舵機在車頂也用2個長螺柱固定。
然后將尋跡固定在車底的螺柱上
接著找到舵機包,組裝舵機到舵機支架上,螺絲不是很好上(我扭滑絲了一個螺絲,螺絲的十字口被扭成圓孔了……)
將舵機固定在車頂的螺柱上,注意固定的時候以右側口為基準線,這樣舵機正好在車底座的正中央
5.安裝電池盒
我沒有鋰電池所有我選擇了干電池盒,將干電池盒固定好后可以直接把電池裝好,后面上了通用版和NFC版后電池就有點難裝,我后來裝的時候還把NFC板拆了才把電池裝進去了……
6.安裝NFC板
在車底座左右兩側都可以安裝,不過左側是豎著安裝,右側是橫著安裝。安裝NFC板前一定要裝上電池不然電池會被擋住裝不進去還得拆掉
先安裝螺柱
再將NFC固定在螺柱上
7.安裝EXB通用底板
通用底板簡單直接固定在之前的四個螺柱上即可。
8.安裝Hi3861板
直接插在通用底板上即可
9.安裝OLED顯示板
直接插在通用底板上即可
10.安裝Robot機器人板
直接插在通用底板上即可
11.連線
連線需要注意兩頭要對應,例如尋跡黃線接的GND那么在機器人板上的傳感器GND針腳就插黃色線。
電源和NFC接線
12.安裝超聲波傳感器
比較難安裝,自攻螺絲我只反向裝了一個正裝卡進舵機(不知道是我哪里不對那是)不然就裝不緊
13.安裝電池開機
主要通用主板上跳帽在左側,然后波動總開關上電。
總結
從安裝到運行整體取決于動手能力,必定我的動手能力一般所以用了兩三個小時。在安裝的過程中基本都還是順利,雖然有部分螺絲不是很理想,但是至少夠組裝起來。如果能在螺絲材料用料上和舵機支架尺寸精準度上在提升一點兒就更完美。

















