可遷移和可適應的駕駛行為預測
arXiv上傳于2022年2月10日的論文“Transferable and Adaptable Driving Behavior Prediction”,伯克利分校工作。
雖然自動駕駛汽車仍難以解決道路行駛中的挑戰性問題,但人類早已掌握高效、可遷移和可適應的駕駛本質。通過模仿人類在駕駛過程中的認知模型和語義理解,HATN,一個分層框架,為多智體密集交通環境的駕駛行為生成高質量、可遷移和可適應的預測。這個分層方法由高級別意圖識別策略和低級軌跡生成策略組成。其中定義一種新的語義子任務,并給出每個子任務的通用狀態表示。有了這些技術,分層結構可以在不同的駕駛場景中遷移。
此外,該模型通過在線適應模塊捕捉個人和場景之間駕駛行為的變化。在開源INTERACTION數據集,通過十字路口和環島的軌跡預測任務展示該算法的性能。
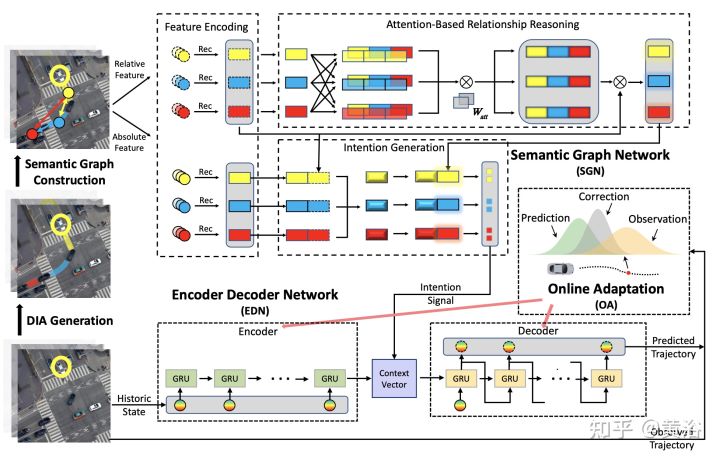
提出的HATN(Hierarchical Adaptable and Transferable Network)框架由四部分組成:
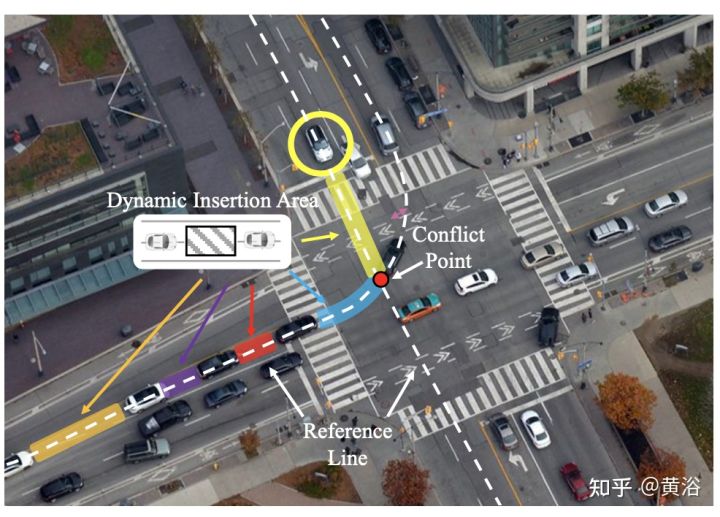
1)左側,提取自車的交互車輛,并構造語義圖(Semantic Graph,SG)。在SG中,定義動態插入區域(Dynamic Insertion Areas,DIA)為圖形的節點,自車可以選擇插入其中。
2) 高級別的語義圖網絡(Semantic Graph Network,SGN)以SG為輸入,負責對車輛之間的關系進行推理,并預測單個車輛的意圖,例如插入哪個區域和相應的目標狀態。
3) 低級別編解碼網絡(Encoder Decoder Network,EDN)接收每輛車的歷史動態和意圖信號,并預測其未來軌跡。
4) 在線適應(OA)模塊根據歷史預測誤差在線適應EDN的參數,該誤差捕捉個體和場景特定的行為。
如圖是HATN的方框圖:
下表正式闡明HATN每個模塊的輸入和輸出:
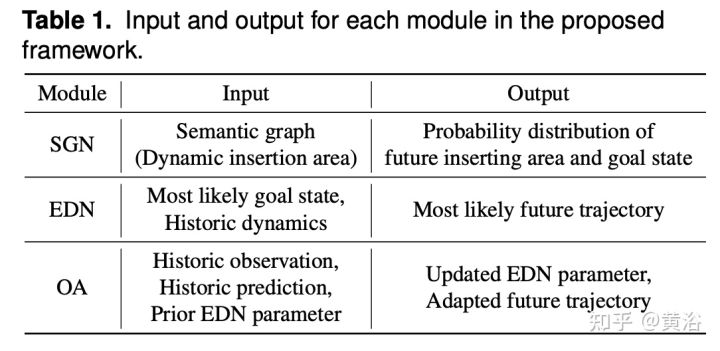
關于各個模型的描述如下:
 HATN
HATN SG (scene graph representation)
SG (scene graph representation) SGN
SGN EDN
EDN MEKF(modified Extended Kalman Filter)
MEKF(modified Extended Kalman Filter)
提取的DIA是一個動態區域,可以由自智體在路上插入或進入。每個DIA由前智體形成的前邊界、后智體形成的后邊界和參考線形成的兩個側邊界組成。如圖是DIA提取和SG構建過程:當其他車輛的車道參考線(通過Dynamic Time Warping 算法確認)與自車的車道參考線交叉時,基于沖突點,提取DIA并將其視為節點來構建SG。
為了推斷任意兩個節點之間的關系,受Graph Attention Network(GAN)的啟發,設計一個基于注意的關系推理層。
一旦高級別策略決定了要去哪里,低級別策略就負責通過更精細粒度處理信息來實現這一目標,其從分層設計中得到好處:
1)學習被簡化,因為車輛只需要關心自己的動力學,而交互、避撞、道路幾何的考慮則留給高層策略來處理(信息隱藏);
2) 該策略僅為達到目標(獎勵隱藏)而優化,這是可控和可解釋的,因為不同措施的效果可以更好地驗證;
3) 學習的策略可以在不同的場景中轉換和重用。
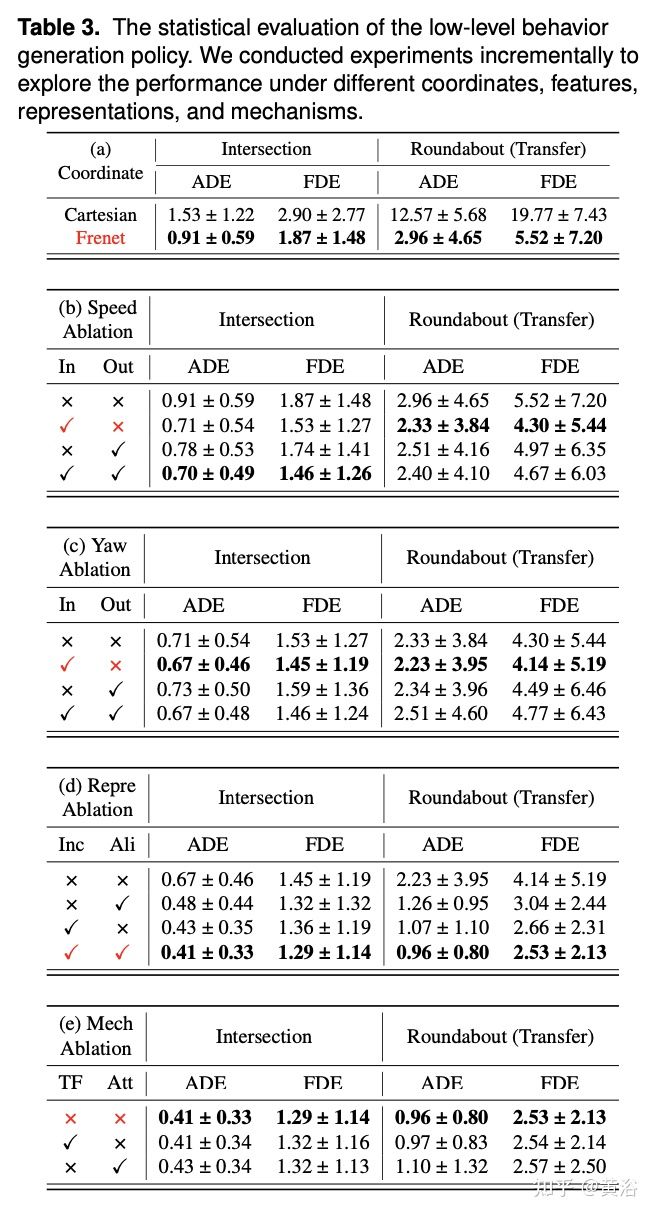
在實踐中,來自高級別策略的預測意圖信號本身可能攜帶來自高層策略或數據分布的誤差方差。實證發現,最佳性能表現在:
1)在Frenet坐標下;
2)包括速度和偏航等輸入特征;
3)應用增量預測和位置對齊等表示技巧;
4)在輸入特征中添加目標狀態和解碼步驟等意圖信號。
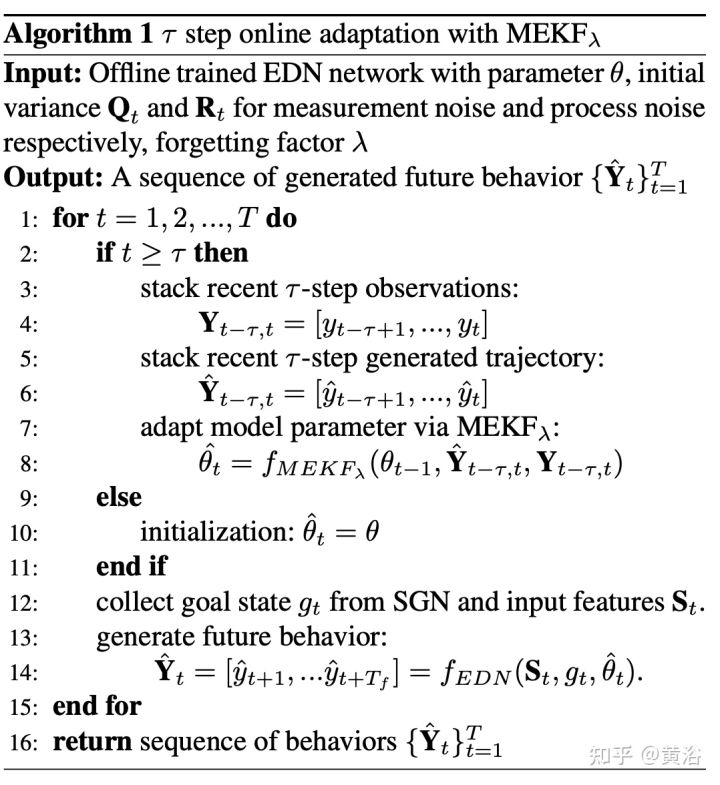
不同的駕駛場景也不可避免地會產生額外的行為變化。因此,利用在線適應(基于卡爾曼濾波器)將定制的個人和場景模式注入到模型中。在線適應的關鍵點是,由于駕駛員無法直接溝通,歷史行為可能是駕駛員駕駛模式的重要線索,基于此,調整模型參數以更好地適應個人或場景。
在線適應背后的直覺是,盡管給定了相同的目標狀態,但駕駛員仍有不同的方式來實現它。捕獲這種定制模式可以改善生成的行為人類相似性。其整個算法的偽代碼如下圖:
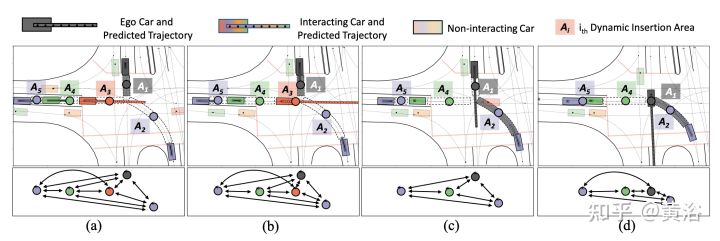
如下是3個實驗場景:
1) 自車如何與其他車輛交互以通過一個共同沖突點(一次交互);
2) 自車如何與其他車輛互動,以通過一系列沖突點(一系列互動);
3) 無需再訓練就將自車遷移到環島場景時,自車與其他車輛的交互方式(場景可遷移交互)。
 場景:一次交互
場景:一次交互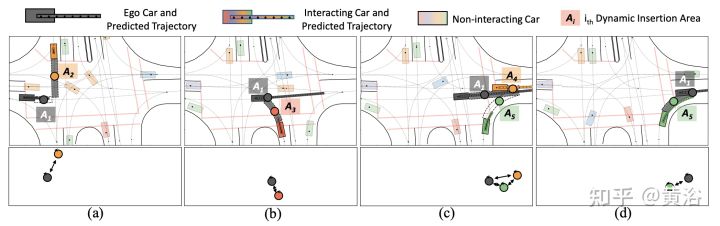 場景:一系列交互
場景:一系列交互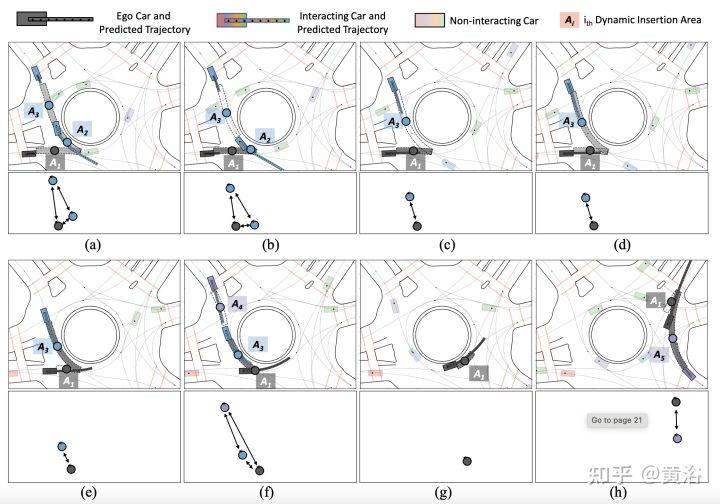 場景:可遷移交互
場景:可遷移交互
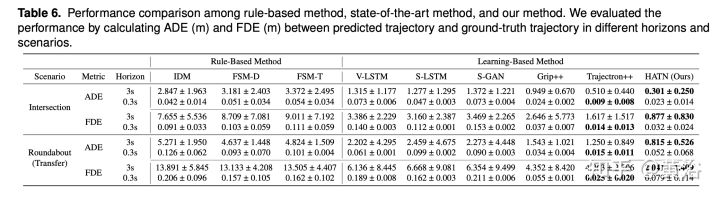
下兩個表是在十字路口和環島場景中HATN和其他6種方法的比較:
1.無時域:該方法不考慮歷史信息,即只考慮當前時間步長t的信息。
2.GAT:這種方法使用絕對特征來計算節點之間的關系,而不是使用相對特征。這種方法對應于原始的圖形注意網絡(GAN)。
3、單智體:該方法只考慮自車意圖預測的損失,不考慮其他車輛的意圖預測。
4.兩層圖:這方法有一個兩層圖來進行信息嵌入,即兩次利用圖進行聚合。
5.多頭:這方法利用多頭注意機制來穩定學習。該方法在Sec中操作關系推理。4.2.2獨立并行多次,并連接所有聚合特征作為最終聚合特征。
6.Seq Graph:該方法首先在每個時間步對圖進行關系推理,然后將聚合圖序列饋送到RNN中進行時間處理。作為比較,我們的方法首先將每個節點的歷史特征序列嵌入到RNN中,然后使用每個節點在當前時間步的隱藏狀態從RNN中進行關系推理。
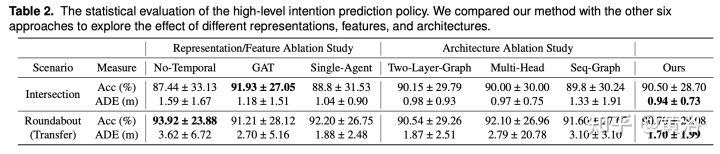
一些觀察:
1)HATN在交叉口和環島實現了最低誤差;
2) 由于缺乏時域信息,無時域方法在交叉口和環島場景中都是最差的;
3) GAT方法產生的錯誤比HATN高得多,尤其是在環島場景(58%),這表明在關系推理中使用相關特征的必要性;
4) HATN優于單智體方法,這意味著將所有車輛生成的目標狀態納入損失函數,可以增加數據并鼓勵交互推理;
5) 兩層圖法是最接近HATN的方法,盡管根據訓練記錄,它有嚴重的過擬合;
6) 多頭方法在交叉口場景中獲得了第二高精度,但在環島場景中的性能要差得多,仔細調整或搜索合適的頭數可以來改善;
7) 在交叉口和環島的情況下,Seq Graph方法是第二差的,這可能意味著對、過去的交互進行復雜編碼很難幫助預測,但確實會使學習更加困難。
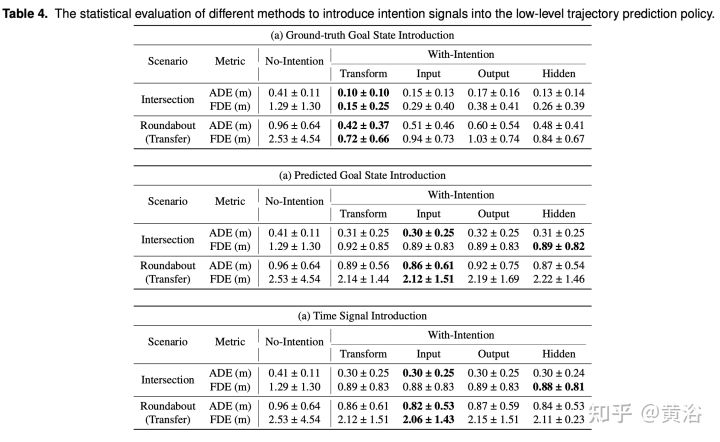
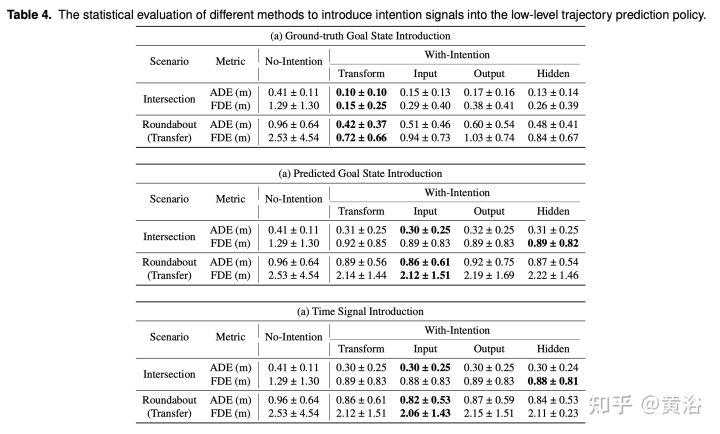
下表是意圖信號的影響:
如下表是基于規則和基于學習的方法和HATN的比較: