讓AI像嬰兒一樣思考!DeepMind“柏拉圖”模型登Nature子刊
論文地址:https://www.nature.com/articles/s41562-022-01394-8
不過,在聊這個項目之前,我們需要先舉一個例子便于大家理解。
假如我拿著一根筆站在你面前,然后我把筆藏在身后,你是不是就看不見這支筆了?
但筆肯定還存在,對吧。

這么簡單的道理,不光你懂,就連兩個月大小的嬰兒都明白。
但背后的原因就很耐人尋味了。科學家很好奇,為什么人會天生就懂這個道理?
DeepMind的故事就從這點簡單的好奇講起。
你以為嬰兒什么都不懂?
我們把「筆放身后看不見但筆還在」叫做萬千物理學常識中的一個,而DeepMind的科學家就是要讓AI和小嬰兒比一比物理學常識。
普林斯頓大學的Luis Piloto和他的同事開發(fā)了一個深度學習AI系統(tǒng),這個系統(tǒng)可以理解一些物理學世界的常識性規(guī)律。
通過這種方式,未來的計算機模型就可以更好的模仿人類思維,用一個有著和嬰兒相同認知的模型來解決問題。
通常意義上,任何AI模型一開始都是白紙一張,然后用各種各樣的例子來訓練這個模型。通過輸入的數(shù)據(jù)和例子,模型產(chǎn)生了知識。
然而科學家指出,嬰兒卻不是這么個模式。
嬰兒學東西并不是從零開始,而是一降生就帶著一些對客觀事物的預判。
還是拿上面那個藏筆舉例子。嬰兒天生就知道,筆就算藏起來了也還在。
這是接下來實驗的底層邏輯。即:嬰兒在出生時就有一些核心的假設,而這些假設會讓他們在之后成長的過程中朝著正確的方向發(fā)展,而他們的知識也會隨著時間的推移、經(jīng)驗的增多變得越來越精煉。
這給了Piloto團隊以啟示。
Piloto想,一個模仿嬰兒行為模式的深度學習人工智能,是不是要比一個一開始白紙一張,單純靠經(jīng)驗學習的人工智能模型表現(xiàn)要好?
研究人員進一步比較了這兩種不同的模式。
他們首先進行的是傳統(tǒng)的辦法(簡稱白紙一張)。他們給了AI模型一些物體的視覺動畫,讓AI進行學習,比方說一個方塊從斜坡上滑下來,或者是一個球彈向墻壁。
AI模型檢測了這些動畫中的運動模式,然后研究人員就開始著手測試,模型能不能預測一些其它物體的運動結果。
而另一邊,模仿嬰兒的人工智能模型在一開始就有了一些「原則」,而這些「原則」的來源就是嬰兒對物體之間運動、交互的一些先天的假設。
舉個簡單的例子,嬰兒知道兩個物體不可能穿過彼此,一個物體不可能憑空升起來等等。
模仿嬰兒認知的AI——「柏拉圖」
而實際上,嬰兒先天就知道的物理學常識不止上面提到的這兩點。完整版是以下五點:
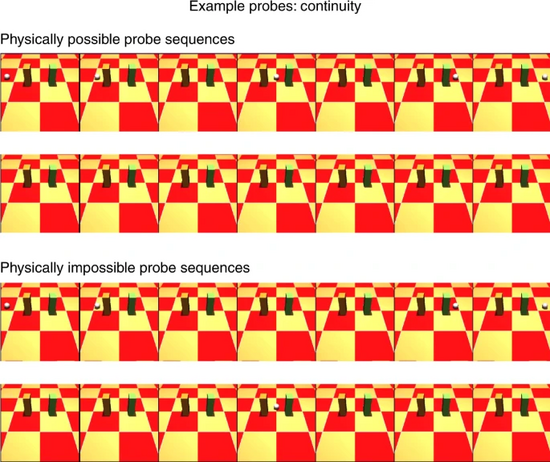
1. 連續(xù)性:物體不會從一個地方傳送到另一個地方,而是在時間和空間中有一定的連續(xù)路徑。
2. 對象持久性:物體在看不見時不會消失。
3. 固體性:物體不會相互滲透。
4. 不變性:對象的屬性(如形狀)不會更改。
5. 定向慣性:物體運動的路徑與慣性原理一致。
基于這五點認知,如果你給嬰兒表演個魔術啥的,然后發(fā)生了違背他們預設認知的現(xiàn)象,他們是能知道你在整花活的,他們也知道反常識的現(xiàn)象并不是事物本來的樣子。
雖然但是,嬰兒還是沒大一點的孩子見識廣,嬰兒會長時間觀察出現(xiàn)的反常識現(xiàn)象,然后和自己預設的認知進行比對,最終才能得出有人在變戲法的結論。
說到這里不禁想起了一個之前熱度很高的視頻,爸媽躲在床單后面,上下晃動床單幾次之后,藏在床單后面的同時,快速躲到身后的房間里。嬰兒在床單消失后沒看到爸媽的身影,就會站在那里思索一會兒,琢磨爸媽去哪兒了。
這里還有一個有意思的點。那就是嬰兒在看到反常識的現(xiàn)象之后,還會表示出「驚訝」,聽起來這是很顯然的事,但研究人員把這種獨特的表現(xiàn)也復刻到AI那里去了。
有了這些基礎,我們再來看實驗結果。
Piloto設計的AI模型名叫PLATO(Physics Learning through Auto-encoding and Tracking Objects),也就是「柏拉圖」。
PLATO接受了差不多30個小時的視頻訓練,這些視頻展示了物體是如何進行一些簡單運動的,然后訓練模型來預測這些物體在不同情況下的運動。
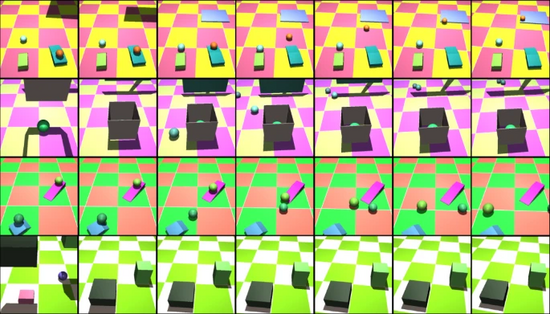
有意思的是,模型最終習得了上述提到的五點物理學常識。
而當觀看的視頻中出現(xiàn)了反常識的現(xiàn)象時,PLATO也能像嬰兒一樣,表現(xiàn)出一定程度的驚訝。
Piloto和他的同事們發(fā)現(xiàn),傳統(tǒng)訓練方法(白紙一張)的AI模型表現(xiàn)不錯,但是不比不知道,一比嚇一跳。模仿嬰兒的AI模型PLATO的表現(xiàn)要好的多得多。
因為有了預設認知的加持,后一種模型可以更精確地預測一個物體的運動,可以把預設的認知應用到新的物體運動動畫中去,并且訓練模型所用的數(shù)據(jù)集規(guī)模也會小一點。
Piloto團隊總結到,雖然通過后天學習和經(jīng)驗積累很重要,但這并不是全部。
他們的研究直指一個經(jīng)典的問題——什么是人類與生俱來的,什么又是后天學習的。
而下一步,就是把這種關于人類的認知應用在AI的研究中。
Piloto已經(jīng)向我們展示了,新方法的卓越成績。
但是,Piloto強調(diào),PLATO并不是要設計成嬰兒行為模型的,我們只是借用嬰兒認知的一些方式來反哺人工智能。
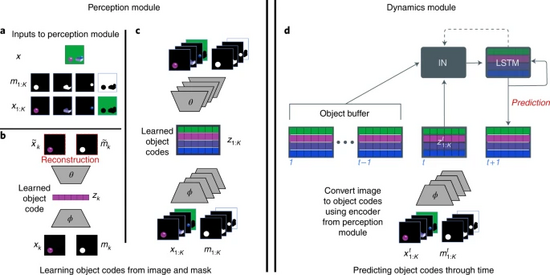
PLATO的仿真系統(tǒng):前饋感知模塊(左)和循環(huán)動態(tài)預測器模塊(右)
溫哥華不列顛哥倫比亞大學的計算機科學家Jeff Clune也表示,把AI和人類嬰兒的學習方式相結合是一個比較重要的方向。
而此時此刻,Clune正和其他研究人員一道,開發(fā)獨屬于他們的理解物理世界的算法的方法。
作者介紹
Luis Piloto是論文的一作,也是通訊作者。

他于2012年獲得羅格斯大學計算機科學學士學位,隨后又去普林斯頓大學攻讀,并分別于2017年和2021年獲得神經(jīng)科學的碩士和博士學位。
2016年,他正式加入DeepMind,成為一名研究科學家。