一文讀懂自動駕駛地圖建設模式
1 高精地圖
高精地圖HDMap在自動駕駛中屬于令人又愛又恨的角色,近年來業內各方勢力也圍繞“是否使用HDMap“也展開了激烈的討論。目前來看,包括Apollo、蔚來、理想、小鵬、Momenta在內的眾多公司,都使用了語義地圖(Semantic HDMap)。
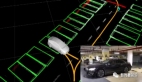
HDMap與普通的導航地圖SDMap相比,精度更高,包含的信息更全。SDMap一般只能達到道路級精度,而且不會提供車道線、路面標志等具體坐標;而HDMap一般能達到分米級別精度,包含有準確的車道線、紅綠燈、標志牌、路面箭頭,甚至有些高精地圖標出了車道線虛實屬性變化點、車道線分叉點、合流點等。
 HDMap
HDMap
在自動駕駛中使用HDMap的優點顯而易見:
- 開天眼:獲得超視距感知能力,相當于開了上帝視角;
- 高精度:分米級別、甚至特定場景厘米級別的精度,能夠給定位和規控模塊
提供非常靠譜的先驗信息,大大降低了算法難度,也降低了出事故的概率; - 高豐富度:HDMap具有相當豐富的信息量,一般包括道路、車道、車道線、路面箭頭、停止線、柵欄、交通標志牌、交通燈等要素,地圖中包含以上地圖要素的幾何、屬性、顏色、拓撲關系等,另外可能還會有車道變化點、道路曲率、道路坡度等。
其局限性同樣很明顯:
- 成本:高精地圖圖商通常采用價格昂貴的采集車建圖,一個傳感器可能就上百萬,另外還有人工成本;除了建圖過程,地圖的傳輸和維護也需要一定成本;
- 覆蓋度:中國很大,地球更大,HDMap不能像SDMap那樣做到那么高的覆蓋度。雖然高德等圖商宣稱已覆蓋中國所有高速,但城區的覆蓋依然是個大難題。隨著自動駕駛的落地,應用場景逐漸從高速走進城區,在沒有高精地圖覆蓋的路段只能抓瞎。這也是為什么很多公司在城區開放的自動駕駛都僅局限于一小段,例如上海的嘉定安亭、北京亦莊,因為只有這些路段有HDMap;
- 鮮度:道路上情況多變,尤其在中國,修路、擺錐桶是家常便飯,指望高精地圖及時反饋這些變化是不太容易的。第一次建好了地圖,后面怎么持續維護地圖才是大難題。很多自動駕駛公司需要面臨的一個實際問題是,當高精地圖信息和感知信息不一致時,相信誰?怎么判斷是高精地圖沒及時更新,還是感知出錯了;
- 法規:地圖是敏感信息,尤其是高精地圖。在中國甚至SDMap都是要經過加偏的(國測局加偏,火星坐標系)。地圖甲級資質國內目前就幾家,而近年來國家也收緊了資質評審,能提供高精地圖服務的圖商不會太多。另外,中國是不允許售賣帶有高度信息的地圖的,這對六自由度的位姿估計是很不友好的。
國內能提供高精地圖服務的,除了騰訊、高德、百度、四維圖新、中海庭等大圖商,還有寬凳、deep motion(已被小米收購)、覺非等體量小一些的圖商。
在法規方面,近期自然資源部放出了一些利好消息。
 自然資源部-智能汽車基礎地圖標準體系建設指南(2023)
自然資源部-智能汽車基礎地圖標準體系建設指南(2023)
2 眾包地圖
以Mobileye的REM為先驅,國內外各自動駕駛公司也都在推進眾包建圖的路線:收集大量車流軌跡信息或單車SLAM建圖結果,在云端融合為準確的語義地圖,并用眾包建圖的結果更新、修補已有的HDMap。
眾包建圖的技術路線能在很大程度上彌補上述高精地圖的缺點:不用維護成本昂貴的采集車,轉而利用量產車上低成本自動駕駛設備,用數量彌補質量。
目前國內自動駕駛算法公司(Momenta)、新勢力(蔚小理)、芯片公司(地平線)、圖商(百度)等,均有眾包建圖的能力,甚至有些面向量產落地的眾包建圖團隊的規模已經相當大。
華為秦通組在ICRA2021發表的RoadMap比較有代表性:將多輛車單車局部建圖的結果上傳到云端進行融合、壓縮,得到準確的輕量化語義地圖,后續的車輛在線下載該地圖,基于該地圖進行6Dof定位。
 華為眾包方案RoadMap Pipeline
華為眾包方案RoadMap Pipeline
 華為眾包地圖RoadMap
華為眾包地圖RoadMap
但眾包地圖方案也面臨著幾項很現實的挑戰:數據安全、政策法規、用戶隱私。
除此之外,眾包建圖在技術層面也面臨著很多長尾case難以處理的困難。
3 導航地圖
導航地圖SDMap是目前最常見的地圖形式,早已在我們的生活中普及多年,例如平時開車會用的百度地圖、高德地圖。
SDMap相比于HDMap的優點是:
- 建圖和維護的成本低
- 發展成熟,覆蓋區域廣泛
- 在法規方面的阻力比HDMap小很多
但SDMap相比于HDMap的缺點也很關鍵:
- 精度低:通常只有道路級精度,達不到車道級精度,難以滿足下游規劃控制的需求
- 信息少:一般沒有具體的車道線、路邊沿的幾何信息,也沒有紅綠燈、標志牌的準確位置信息,這些對定位和規劃控制來說是較大的挑戰。
之前也介紹了,在依賴的高精地圖的自動駕駛方案受到法規、成本等因素的影響,推進受限時,主流玩家們紛紛將目光投向了SDMap,也就是接下來要說的輕地圖方案
4 輕地圖方案(SDMap+ / HDMap-)
對于量產自動駕駛來說,高精地圖還是太“重”了。
往前數五年,包括小鵬、華為在內的很多玩家都基于高精地圖跑通了高速路段和小部分城區路段,放出了漂亮的demo。但隨著技術的演進和商業化步伐的加快,城市NOA的交付成了頭部玩家們角逐的重點,曾經"真香"的高精地圖卻成為大規模量產落地的最大障礙。于是輕地圖方案應運而生。
這里說應運而生其實不嚴謹,因為輕地圖方案其實不是什么新東西,例如馬斯克很早就明確表示特斯拉不用高精地圖,原因還是上面說的覆蓋度、鮮度、成本這些。(特斯拉只在標注環節用了高精地圖,FSD實車運行只接入了導航地圖)
輕地圖方案指的是不用重量級的HDMap,而是基于輕量級的SDMap,或是基于處于HDMap和SDMap之間的地圖形式,結合單車強大的感知能力,實現自動駕駛。
輕地圖方案期望擺脫高精地圖的枷鎖,降低對地圖的依賴程度,相應的對單車感知能力的要求也大大提高。也正是因為近年來視覺感知技術的進步,才使得“輕地圖、重感知”的路線稱為可能,而這其中Transformer和BEV方案功不可沒。
其實直到今天,大多數玩家的主線項目普遍還是高度依賴高精地圖的,畢竟沒高精地圖連Demo都很難做出來,沒demo融不到錢公司都活不到輕地圖這一天。即使有不少公司走眾包地圖的路線,嚴格意義上也還是高精地圖,只是用眾包的方式去生產地圖而已。
2022年,在地圖法規收緊,和感知能力增強的雙重背景下,輕地圖重感知路線又成為大家競相追逐的香餑餑。
22年9月毫末在AI Day喊出"重感知,輕地圖"的口號。小鵬在的XNGP也宣布不再依賴高精地圖。23年3月元戎發布了不依賴高精地圖的智能駕駛解決方案DeepRoute-Driver 3.0,從視頻上看效果相當不錯。理想23年的城市NOA也明確表明了不依賴高精地圖理想掀起“上車潮”、重感知輕地圖 2023年開啟城市NOA元年理想23年的城市NOA也明確表明了不依賴高精地圖。除此之外,蔚來、地平線等頭部玩家內部也有相當的資源投入輕地圖路線。
很多公司在宣傳時講的都是導航地圖SDMap,但實際應用大概率還是會在SDMap的基礎上添加一些HDMap中的重要信息,稱之為SDMap+或HDMap-。單純只用SDMap,對城市NOA來說還是不太現實的。
目前國內各公司在輕地圖方案上也都還在探索階段,也可以預測到會遇到重重困難,離量產落地還有一定距離,個人認為輕地圖、重地圖的爭論還沒有到蓋棺定論的時候。23年年中到24年年初,是多家公司承諾的無HDMap城市NOA交付日期,我們拭目以待。