













量化自定義PyTorch模型入門教程
在以前Pytorch只有一種量化的方法,叫做“eager mode qunatization”,在量化我們自定定義模型時經常會產生奇怪的錯誤,并且很難解決。但是最近,PyTorch發布了一種稱為“fx-graph-mode-qunatization”的方方法。在本文中我們將研究這個fx-graph-mode-qunatization”看看它能不能讓我們的量化操作更容易,更穩定。

本文將使用CIFAR 10和一個自定義AlexNet模型,我對這個模型進行了小的修改以提高效率,最后就是因為模型和數據集都很小,所以CPU也可以跑起來。
import os
import cv2
import time
import torch
import numpy as np
import torchvision
from PIL import Image
import torch.nn as nn
import matplotlib.pyplot as plt
from torchvision import transforms
from torchvision import datasets, models, transforms
device = "cpu"
print(device)
transform = transforms.Compose([
transforms.Resize(224),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
])
batch_size = 8
trainset = torchvision.datasets.CIFAR10(root='./data', train=True,
download=True, transform=transform)
testset = torchvision.datasets.CIFAR10(root='./data', train=False,
download=True, transform=transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=batch_size,
shuffle=True, num_workers=2)
testloader = torch.utils.data.DataLoader(testset, batch_size=batch_size,
shuffle=False, num_workers=2)
def print_model_size(mdl):
torch.save(mdl.state_dict(), "tmp.pt")
print("%.2f MB" %(os.path.getsize("tmp.pt")/1e6))
os.remove('tmp.pt')模型代碼如下,使用AlexNet是因為他包含了我們日常用到的基本層:
from torch.nn import init
class mAlexNet(nn.Module):
def __init__(self, num_classes=2):
super().__init__()
self.input_channel = 3
self.num_output = num_classes
self.layer1 = nn.Sequential(
nn.Conv2d(in_channels=self.input_channel, out_channels= 16, kernel_size= 11, stride= 4),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2)
)
init.xavier_uniform_(self.layer1[0].weight,gain= nn.init.calculate_gain('conv2d'))
self.layer2 = nn.Sequential(
nn.Conv2d(in_channels= 16, out_channels= 20, kernel_size= 5, stride= 1),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2)
)
init.xavier_uniform_(self.layer2[0].weight,gain= nn.init.calculate_gain('conv2d'))
self.layer3 = nn.Sequential(
nn.Conv2d(in_channels= 20, out_channels= 30, kernel_size= 3, stride= 1),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2)
)
init.xavier_uniform_(self.layer3[0].weight,gain= nn.init.calculate_gain('conv2d'))
self.layer4 = nn.Sequential(
nn.Linear(30*3*3, out_features=48),
nn.ReLU(inplace=True)
)
init.kaiming_normal_(self.layer4[0].weight, mode='fan_in', nnotallow='relu')
self.layer5 = nn.Sequential(
nn.Linear(in_features=48, out_features=self.num_output)
)
init.kaiming_normal_(self.layer5[0].weight, mode='fan_in', nnotallow='relu')
def forward(self, x):
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
# Squeezes or flattens the image, but keeps the batch dimension
x = x.reshape(x.size(0), -1)
x = self.layer4(x)
logits= self.layer5(x)
return logits
model = mAlexNet(num_classes= 10).to(device)現在讓我們用基本精度模型做一個快速的訓練循環來獲得基線:
import torch.optim as optim
def train_model(model):
criterion = nn.CrossEntropyLoss()
optimizer = optim.SGD(model.parameters(), lr=0.001, momentum = 0.9)
for epoch in range(2):
running_loss =0.0
for i, data in enumerate(trainloader,0):
inputs, labels = data
inputs, labels = inputs.to(device), labels.to(device)
optimizer.zero_grad()
outputs = model(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
# print statistics
running_loss += loss.item()
if i % 1000 == 999:
print(f'[Ep: {epoch + 1}, Step: {i + 1:5d}] loss: {running_loss / 2000:.3f}')
running_loss = 0.0
return model
model = train_model(model)
PATH = './float_model.pth'
torch.save(model.state_dict(), PATH)
可以看到損失是在降低的,我們這里只演示量化,所以就訓練了2輪,對于準確率我們只做對比。
我將做所有三種可能的量化:
- 動態量化 Dynamic qunatization:使權重為整數(訓練后)
- 靜態量化 Static quantization:使權值和激活值為整數(訓練后)
- 量化感知訓練 Quantization aware training:以整數精度對模型進行訓練
我們先從動態量化開始:
import torch
from torch.ao.quantization import (
get_default_qconfig_mapping,
get_default_qat_qconfig_mapping,
QConfigMapping,
)
import torch.ao.quantization.quantize_fx as quantize_fx
import copy
# Load float model
model_fp = mAlexNet(num_classes= 10).to(device)
model_fp.load_state_dict(torch.load("./float_model.pth", map_locatinotallow=device))
# Copy model to qunatize
model_to_quantize = copy.deepcopy(model_fp).to(device)
model_to_quantize.eval()
qconfig_mapping = QConfigMapping().set_global(torch.ao.quantization.default_dynamic_qconfig)
# a tuple of one or more example inputs are needed to trace the model
example_inputs = next(iter(trainloader))[0]
# prepare
model_prepared = quantize_fx.prepare_fx(model_to_quantize, qconfig_mapping,
example_inputs)
# no calibration needed when we only have dynamic/weight_only quantization
# quantize
model_quantized_dynamic = quantize_fx.convert_fx(model_prepared)正如你所看到的,只需要通過模型傳遞一個示例輸入來校準量化層,所以代碼十分簡單,看看我們的模型對比:
print_model_size(model)
print_model_size(model_quantized_dynamic)
可以看到的,減少了0.03 MB或者說模型變為了原來的75%,我們可以通過靜態模式量化使其更小:
model_to_quantize = copy.deepcopy(model_fp)
qconfig_mapping = get_default_qconfig_mapping("qnnpack")
model_to_quantize.eval()
# prepare
model_prepared = quantize_fx.prepare_fx(model_to_quantize, qconfig_mapping, example_inputs)
# calibrate
with torch.no_grad():
for i in range(20):
batch = next(iter(trainloader))[0]
output = model_prepared(batch.to(device))靜態量化與動態量化是非常相似的,我們只需要傳遞更多批次的數據來更好地校準模型。
讓我們看看這些步驟是如何影響模型的:

可以看到其實程序為我們做了很多事情,所以我們才可以專注于功能而不是具體的實現,通過以上的準備,我們可以進行最后的量化了:
# quantize
model_quantized_static = quantize_fx.convert_fx(model_prepared)量化后的model_quantized_static看起來像這樣:

現在可以更清楚地看到,將Conv2d和Relu層融合并替換為相應的量子化對應層,并對其進行校準。可以將這些模型與最初的模型進行比較:
print_model_size(model)
print_model_size(model_quantized_dynamic)
print_model_size(model_quantized_static)
量子化后的模型比原來的模型小3倍,這對于大模型來說非常重要
現在讓我們看看如何在量化的情況下訓練模型,量化感知的訓練就需要在訓練的時候加入量化的操作,代碼如下:
model_to_quantize = mAlexNet(num_classes= 10).to(device)
qconfig_mapping = get_default_qat_qconfig_mapping("qnnpack")
model_to_quantize.train()
# prepare
model_prepared = quantize_fx.prepare_qat_fx(model_to_quantize, qconfig_mapping, example_inputs)
# training loop
model_trained_prepared = train_model(model_prepared)
# quantize
model_quantized_trained = quantize_fx.convert_fx(model_trained_prepared)
讓我們比較一下到目前為止所有模型的大小。
print("Regular floating point model: " )
print_model_size( model_fp)
print("Weights only qunatization: ")
print_model_size( model_quantized_dynamic)
print("Weights/Activations only qunatization: ")
print_model_size(model_quantized_static)
print("Qunatization aware trained: ")
print_model_size(model_quantized_trained)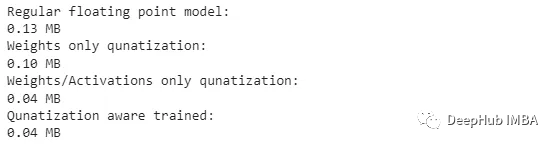
量化感知的訓練對模型的大小沒有任何影響,但它能提高準確率嗎?
def get_accuracy(model):
correct = 0
total = 0
with torch.no_grad():
for data in testloader:
images, labels = data
images, labels = images, labels
outputs = model(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
return 100 * correct / total
fp_model_acc = get_accuracy(model)
dy_model_acc = get_accuracy(model_quantized_dynamic)
static_model_acc = get_accuracy(model_quantized_static)
q_trained_model_acc = get_accuracy(model_quantized_trained)
print("Acc on fp_model:" ,fp_model_acc)
print("Acc weigths only quantization:", dy_model_acc)
print("Acc weigths/activations quantization" ,static_model_acc)
print("Acc on qunatization awere trained model:" ,q_trained_model_acc)
為了更方便的比較,我們可視化一下:

可以看到基礎模型與量化模型具有相似的準確性,但模型尺寸大大減小,這在我們希望將其部署到服務器或低功耗設備上時至關重要。











