OpenCV 也可以檢測、跟蹤移動物體
想象一下,你用手機拍攝視頻,按下一個按鈕,相機就開始錄制視頻。在幕后,手機相機非常快速地捕捉圖像,當你觀看視頻時,你看到的是一幅接一幅的圖像,但你沒注意到,因為這個過程發生得非常快。一秒鐘內,你的手機顯示了30多幅圖像。如果你比較這些圖像并找到它們之間的差異,你就可以檢測到移動物體,這正是背景減除器的工作原理。
使用背景減除器檢測和追蹤鳥類
在本文中,我將解釋背景減除器的工作原理、不同類型的背景減除器以及如何使用 OpenCV 在 Python 中使用它們。
檢測移動物體的方法
1. 基本運動檢測
第一種方法也是最直觀的方法是計算幀與幀之間,或一個被認為是“背景”的幀和所有其他幀之間的差異。這個想法在最高層次上相當簡單:首先,保存第一幀。保存后,將其與新幀進行比較。通過逐像素比較,簡單地從兩幅圖像中減去。通過這種方式,你將獲得移動物體。
這種技術實現起來相當快,但并不適合應用,因為你需要將默認幀設置為背景,而背景在你的應用中可能不會保持恒定。
想象一下,你正在檢測汽車。設置一個默認背景并不會有效,因為汽車在不斷移動,一切都在變化。光線在變化,物體在移動。例如,你將第一幀設置為背景圖像,背景圖像中有3輛汽車,但僅僅一秒鐘后,它們就不會再存在,因為它們在移動。因此,背景圖像變得不準確,因為一切都在迅速變化。因此,算法不會很準確,特別是在環境快速變化的情況下。
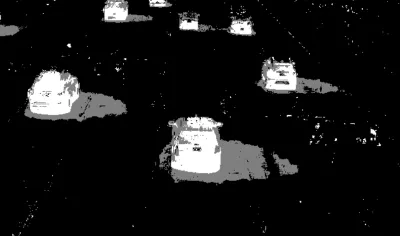
看看圖像;算法是工作的,但不是很準確。看看左邊的圖像;有一些無意義的區域。那是因為在視頻中,背景幾乎每秒鐘都在變化,但在算法中,背景是恒定的。
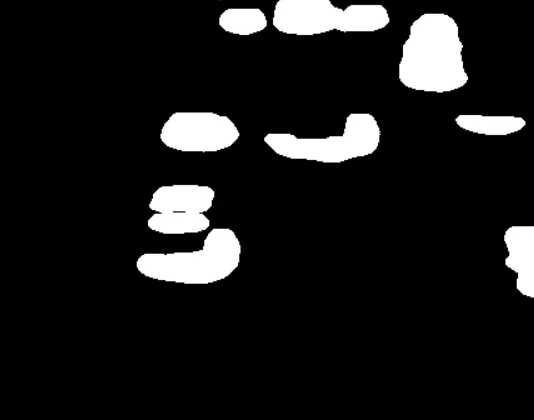
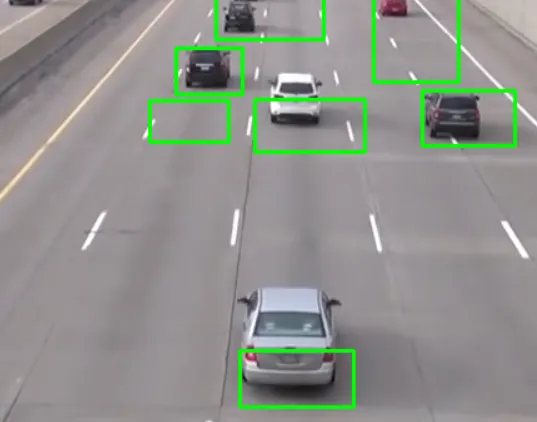
左邊的圖像顯示了默認背景幀和當前幀之間的差異,而右邊的圖像顯示了帶有邊界框的當前幀
我想你已經理解了基本運動檢測的主要思想。根據你的期望,它可能有用。如果你不期望高精度,你可以考慮使用它。為了解決我上面討論的問題,背景減除器開始發揮作用。現在是時候談談背景減除和減除器了。
2. 背景減除
背景減除是計算機視覺中的一項基本技術,用于在視頻流中將移動物體從背景中隔離出來。通過將視頻中的每一幀與背景模型進行比較,可以識別出顯著差異的區域作為潛在的前景物體。然后,這個前景信息可以用于各種目的,包括目標檢測和追蹤。背景減除通常是許多目標追蹤和檢測算法中的關鍵步驟。
在背景減除中,背景圖像不是恒定的;由于光線變化、物體移動和場景動態等各種因素,它會隨著時間變化。背景減除算法的目標是適應性地建模和更新背景,以在變化的環境中準確檢測前景物體。通過這種方式,背景問題得到了解決。
在 OpenCV 中,背景減除器可以檢測陰影,并且通過閾值處理,它們可以從減除器檢測到的物體中排除陰影。這確實是準確檢測物體的一個非常重要的特性,因為未識別的陰影區域可能被減除器錯誤地解釋為單獨的移動物體,這是不可取的。
使用 OpenCV 中的背景減除器
Opencv 有幾種不同的背景減除器。我將使用其中兩個最著名的減除器:
- K-最近鄰 (KNN)
- 高斯混合 (MOG2)
我將只解釋 MOG2 如何進行背景減除,但我將使用這兩種方法來檢測和追蹤視頻。
下面是 MOG2 如何進行背景減除的:
- 初始化:初始化 K 個高斯分布的混合,以模擬場景的背景。每個像素的背景模型由高斯混合表示,K 是一個預定義的參數。
- 適應:隨著時間的推移,更新每個像素的背景模型,調整高斯分布的參數以適應場景的變化。
- 前景檢測:根據高斯混合模型計算每個像素屬于背景的概率。概率低的像素被分類為前景。
- 更新背景:對于被分類為背景的像素,更新高斯分布以納入新的觀察結果并適應場景的變化
- 后處理:應用形態學操作(腐蝕、膨脹..)或其他技術來細化前景掩碼并去除噪聲。
代碼 / 檢測和追蹤移動物體
在代碼中,我已經解釋了大部分過程,但理解它的最佳方式是復制代碼并使用 cv2.imshow 函數觀察每個操作后的每一幀。
Subtraction

Threshold

Dilation
# import libraries
import cv2
import numpy as np
# KNN
KNN_subtractor = cv2.createBackgroundSubtractorKNN(detectShadows = True) # detectShadows=True : exclude shadow areas from the objects you detected
# MOG2
MOG2_subtractor = cv2.createBackgroundSubtractorMOG2(detectShadows = True) # exclude shadow areas from the objects you detected
# choose your subtractor
bg_subtractor=MOG2_subtractor
camera = cv2.VideoCapture("resources/run.mp4")
while True:
ret, frame = camera.read()
# Every frame is used both for calculating the foreground mask and for updating the background.
foreground_mask = bg_subtractor.apply(frame)
# threshold if it is bigger than 240 pixel is equal to 255 if smaller pixel is equal to 0
# create binary image , it contains only white and black pixels
ret , treshold = cv2.threshold(foreground_mask.copy(), 120, 255,cv2.THRESH_BINARY)
# dilation expands or thickens regions of interest in an image.
dilated = cv2.dilate(treshold,cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (3,3)),iterations = 2)
# find contours
contours, hier = cv2.findContours(dilated,cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# check every contour if are exceed certain value draw bounding boxes
for contour in contours:
# if area exceed certain value then draw bounding boxes
if cv2.contourArea(contour) > 50:
(x,y,w,h) = cv2.boundingRect(contour)
cv2.rectangle(frame, (x,y), (x+w, y+h), (255, 255, 0), 2)
cv2.imshow("Subtractor", foreground_mask)
cv2.imshow("threshold", treshold)
cv2.imshow("detection", frame)
if cv2.waitKey(30) & 0xff == 27:
break
camera.release()
cv2.destroyAllWindows()