













Zero-shot重建物理高斯資產,清華&光輪視覺大模型讓機器人理解物理屬性|ICRA 2025
理解物體的物理屬性,對機器人執行操作十分重要,但是應該如何實現呢?
光輪智能與清華AIR、同濟大學等機構聯合提出了一種基于3D高斯濺射的方法——
PUGS(Zero-shot Physical Understandingwith Gaussian Splatting)
無需訓練、零樣本,它就能夠從多視角圖像中重建物體,并對各種指定的物理屬性進行密集重建。
該論文已被ICRA 2025接收。

在非結構化環境中,準確理解物體的物理屬性不僅能幫助機器人更好地規劃抓取策略,還能避免因錯誤估計導致的操作失敗(比如下手太重導致物體損壞)。
現有的方法如NeRF2Physics利用NeRF來對物體進行重建,并結合視覺語言模型(VLM)與大語言模型(LLM)進行物理屬性預測。
但是,此類方法存在預測結果碎片化、物理屬性不連續不合理的問題。
研究團隊通過3D高斯濺射作為重建表征,并引入區域感知特征來增強區域區分的能力。
在此基礎上,結合基于VLM的物理屬性預測和基于特征的屬性傳播,可以達到更好的物體重建和更加合理的物理屬性預測結果。
為了保持重建結果的幾何一致性,研究團隊還引入了幾何感知的正則化損失和稀疏損失,確保高斯分布與物體的實際空間形狀分布一致。
高斯濺射+視覺大模型,理解物理屬性
PUGS框架分為三個階段——形狀與區域感知的3DGS重建、基于視覺語言模型(VLM)的物理屬性預測,以及基于區域特征的屬性傳播。
對于物體級別的物理屬性(例如質量),則還包含高斯體積積分模塊以得到整體的物理屬性結果。
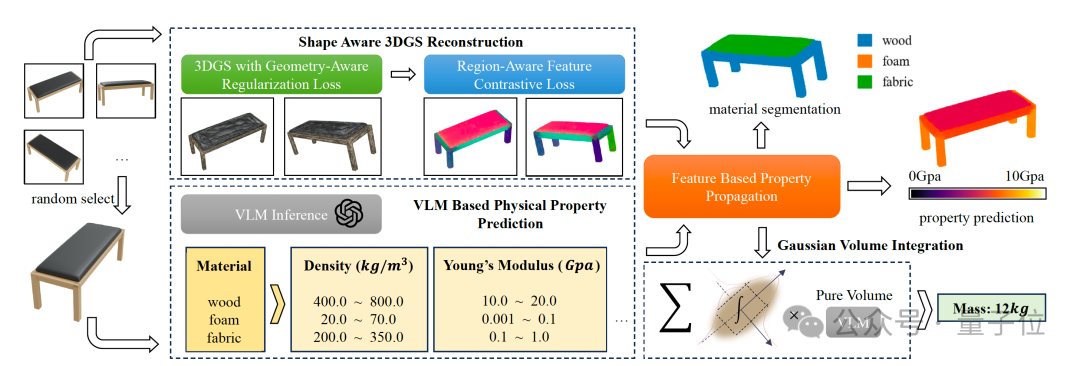
PUGS以物體的多視角圖像作為輸入,同時允許給定需要預測的物體屬性(如密度、硬度系數、楊氏模量等),最終輸出則是物體的重建結果,其中包含了物體的RGB信息,以及任意位置的物理屬性。
形狀與區域感知的3DGS重建
PUGS首先使用3DGS來從多視角RGB圖像中重建物體。
但是原始的3DGS重建通常會出現Floater,這導致重建結果的細節表現不佳,并且在幾何的準確性上存在問題。
研究團隊參考現有方法,引入幾何感知的正則化損失和稀疏損失,損失項如下:
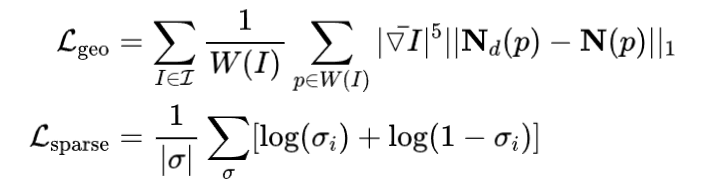
其中,是圖像中的像素集合,是歸一化到0到1的圖像梯度;
是基于像素點的局部平面計算得到的法向量,是基于PGSR提出的無偏深度渲染計算得到的法向量,是每個高斯的不透明度。
這里是幾何感知的正則化損失,是稀疏損失。
前者通過兩種不同方式來渲染法線圖,并鼓勵輸出結果盡可能一致,從而確保高斯分布與物體的實際空間形狀一致;
而后者則鼓勵每個高斯的不透明度靠近0或1,減少中間結果的存在。
引入幾何感知的正則損失(Geometry-Aware Regularization Loss, GARL)后,可以有效緩解Floater問題,增強幾何的準確性。

此外,PUGS還引入了區域感知的特征對比損失,通過對比學習訓練高斯分布的特征,使其能夠區分物體的不同區域。
在現實場景中,物體表面可能存在不同的材料,如金屬、木材、塑料等,而這些材料在物體上通常表現為不同的區域。
對區域的區分有助于提高物理屬性預測的準確性。
研究團隊首先向每個Gaussian上引入一個新的可學習特征,并使用-blending來渲染出不同視角下的特征圖,然后使用SAM對多視角圖像進行分割,以區分物體的不同區域。
之后,利用對比學習來訓練該特征。損失函數如下:

其中,表示兩個像素是否屬于同一個區域,是兩個像素點在特征空間中的余弦相似性。
直觀來說,如果兩個像素點屬于同一個區域,那么它們在特征空間中的余弦相似性應該越大越好,反之則應該越小越好。
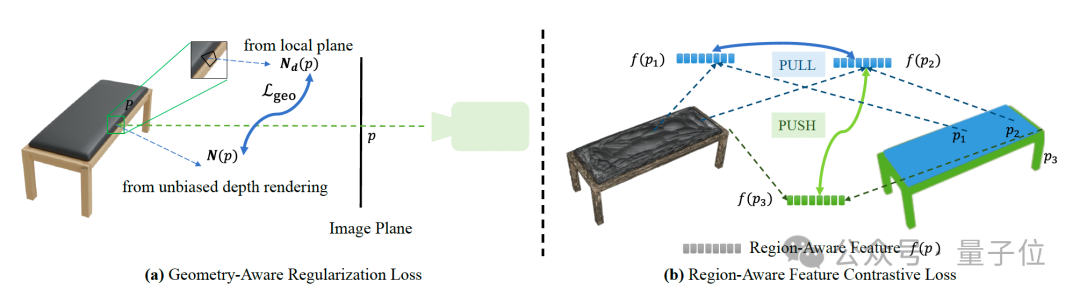
△幾何感知損失與形狀感知特征訓練的示意圖
基于VLM的物理屬性預測
在重建階段完成后,PUGS利用視覺語言模型(VLM)進行零樣本物理屬性預測。
NeRF2Physics采用兩階段的方法來進行物理屬性預測。
它首先通過VLM來從物體的圖像預測物體的文本描述,然后將該文本描述輸入給LLM來預測材質和物理屬性。
與NeRF2Physics不同,PUGS直接使用VLM對多視角圖像中的某一張進行材質和物理屬性預測,避免了圖像到文本轉換過程中的信息丟失。
該階段VLM輸出的結果包括物體可能的材質,以及這些材質的物理屬性范圍等。
這些屬性在后續會通過CLIP特征傳播到重建的3DGS中。
基于區域特征的屬性傳播
為了將預測的物理屬性傳播到重建結果中,PUGS使用CLIP特征作為基礎進行映射,并使用區域感知特征作為依據進行屬性傳播。
首先研究團隊從3DGS中隨機采樣一些高斯點作為source point,并計算這些source point投影到多視角圖像上得到的patch對應的CLIP特征。
這些特征與上一階段得到的候選材質進行相似性的計算,以分配不同的材質到對應的source point上。計算方式如下:
其中,是source point 的物理屬性值,是source point 的CLIP特征與候選材質的CLIP特征之間的余弦相似性,是一個溫度參數。
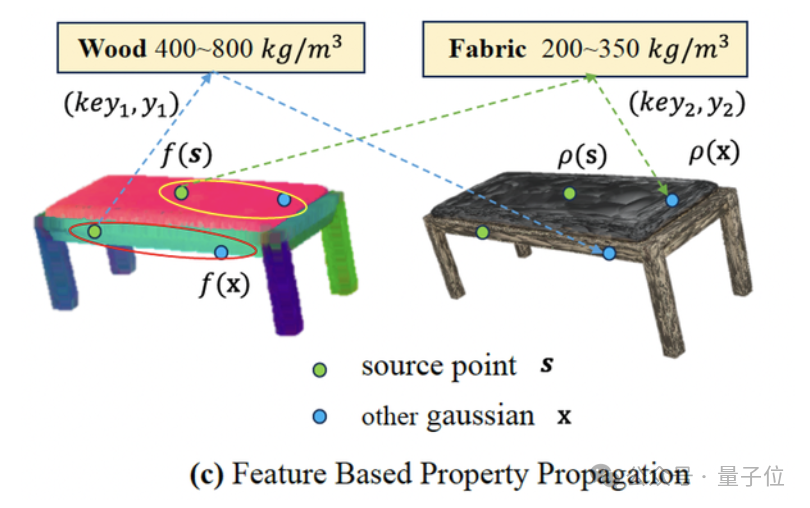
△基于形狀感知特征的物理屬性傳播
為了完成密集的物理屬性預測,研究團隊使用區域特征作為依據進行屬性傳播。計算方式如下:

其中,和分別是高斯和的區域感知特征。
基于區域感知特征的屬性傳播方式使得物理屬性預測結果更加均勻和精確。
高斯體積積分
通過上面三個階段,PUGS已經可以完成物體的重建以及密集的物理屬性預測,即在物體表面的每個點都能夠得到相應的物理屬性。
而對于物體級別的物理屬性(如質量),PUGS提出了基于高斯體積積分的模塊來進行計算。
以物體質量的預測為例,通過上述階段,PUGS可以得到每個3D高斯點對應的物理屬性,即密度值。
之后每個3D高斯被視為一個3D橢球體,通過其不透明度進行加權,同時結合預測的密度值進行累積計算,得到物體的初步體積預測。
這個初步體積預測結果是存在誤差的,因為3DGS重建結果通常只會對物體的表面進行建模,而物體內部表現出空洞。
為了進一步提高精度,PUGS引入了“pure volume”概念,這代表一個物體忽略空洞區域后的體積,一般會遠小于通常意義下物體的體積。
PUGS通過提示VLM來獲取物體的pure volume,并以此修正最終的預測結果。
預測準確性大幅提升
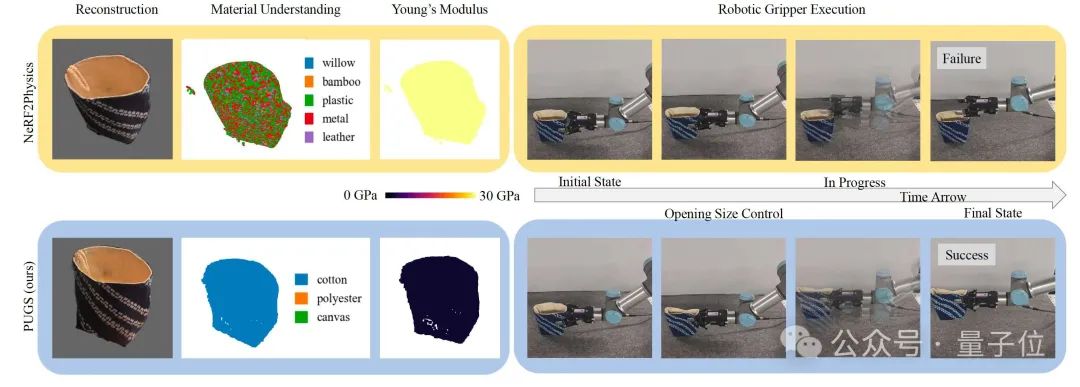
定性結果顯示,NeRF2Physics的材質預測表現出碎片化等不合理的情況,PUGS的預測結果則更加準確和合理。

在物體的抓取實驗中,PUGS準確預測了一個棉布包裹的楊氏模量(0.5+GPa),使機械臂的夾持器能夠以合適的開口大小成功抓取物體。
相比之下,NeRF2Physics錯誤地預測了該物體的楊氏模量(30+GPa),導致夾持器開口接近物體寬度,最終抓取失敗。
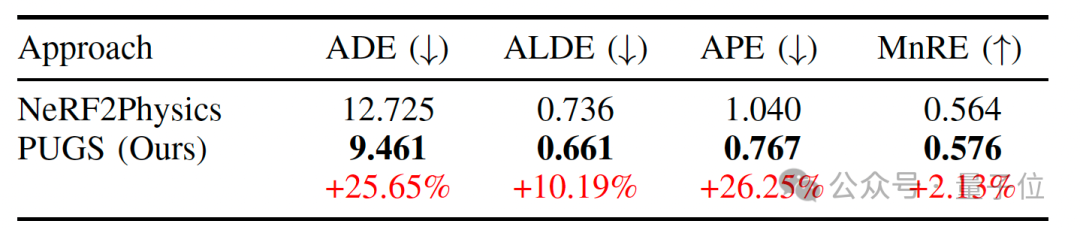
研究團隊還在ABO-500數據集上進行了物體質量估計的實驗,并與NeRF2Physics進行了對比,結果PUGS在多個指標上都表現更優。
此外,研究團隊還對上述PUGS的Pipeline中的不同模塊進行消融實驗,包括幾何感知的正則化損失、區域感知的特征訓練以及基于高斯體積積分模塊,結果表明這些模塊都有助于提升定量結果。
其中不僅在ABO-500數據集上整體有所提升,并且在一些具有特殊特征的物體上提升更加明顯。
下表的subset A指的是ABO-500中一些具有較為精細結構的物體組成的子集,而subset B指的是那些具有多種區域和材質的物體子集。
這表示幾何感知的正則化損失對具有精細結構的物體提升較大,而區域感知模塊則對多種材質和區域的區分更加有效。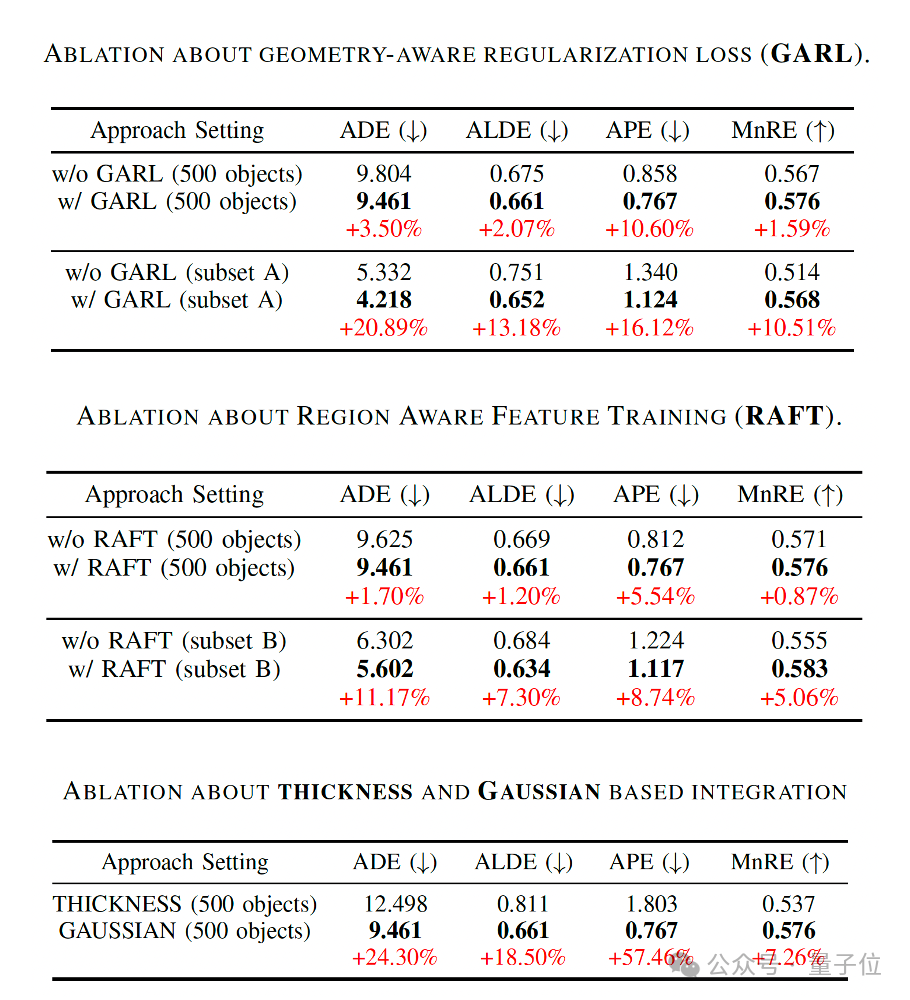
總之,PUGS不僅能夠準確重建物體的幾何形狀,還能保持物理屬性預測的材質一致性,這對于實際的機器人應用具有重要意義。
同時該重建結果也能夠作為一種攜帶相關物理屬性的重建資產,用于其他相關的下游任務。
論文地址:
https://arxiv.org/pdf/2502.12231項目主頁:
https://evernorif.github.io/PUGS/
GitHub:
https://github.com/EverNorif/PUGS



























