深度學習 + OpenCV,Python實現實時視頻目標檢測
使用 OpenCV 和 Python 對實時視頻流進行深度學習目標檢測是非常簡單的,我們只需要組合一些合適的代碼,接入實時視頻,隨后加入原有的目標檢測功能。
在本文中我們將學習如何擴展原有的目標檢測項目,使用深度學習和 OpenCV 將應用范圍擴展到實時視頻流和視頻文件中。這個任務會通過 VideoStream 類來完成。
- 深度學習目標檢測教程:http://www.pyimagesearch.com/2017/09/11/object-detection-with-deep-learning-and-opencv/
- VideoStream 類教程:http://www.pyimagesearch.com/2016/01/04/unifying-picamera-and-cv2-videocapture-into-a-single-class-with-opencv/
現在,我們將開始把深度學習+目標檢測的代碼應用于視頻流中,同時測量 FPS 處理速度。
使用深度學習和 OpenCV 進行視頻目標檢測
為了構建基于 OpenCV 深度學習的實時目標檢測器,我們需要有效地接入攝像頭/視頻流,并將目標檢測應用到每一幀里。
首先,我們打開一個新文件,將其命名為 real_time_object_detection.py,隨后加入以下代碼:

我們從第 2-8 行開始導入封包。在此之前,你需要 imutils 和 OpenCV 3.3。在系統設置上,你只需要以默認設置安裝 OpenCV 即可(同時確保你遵循了所有 Python 虛擬環境命令)。
Note:請確保自己下載和安裝的是 OpenCV 3.3(或更新版本)和 OpenCV-contrib 版本(適用于 OpenCV 3.3),以保證其中包含有深度神經網絡模塊。
下面,我們將解析這些命令行參數:
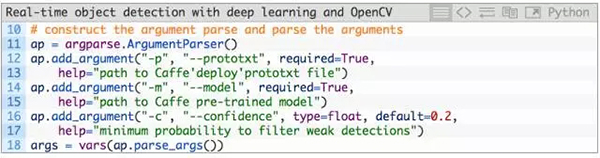
與此前的目標檢測項目相比,我們不需要圖像參數,因為在這里我們處理的是視頻流和視頻——除了以下參數保持不變:
- --prototxt:Caffe prototxt 文件路徑。
- --model:預訓練模型的路徑。
- --confidence:過濾弱檢測的最小概率閾值,默認值為 20%。
隨后,我們初始化類列表和顏色集:
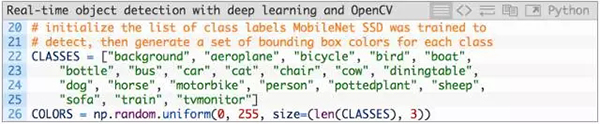
在第 22-26 行,我們初始化 CLASS 標簽,和相應的隨機 COLORS。有關這些類的詳細信息(以及網絡的訓練方式),請參考:http://www.pyimagesearch.com/2017/09/11/object-detection-with-deep-learning-and-opencv/
現在,我們加載自己的模型,并設置自己的視頻流:
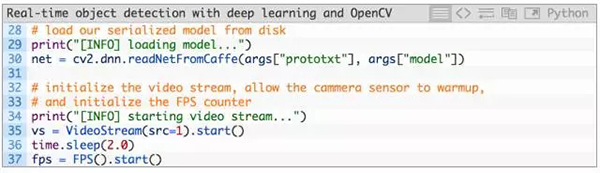
我們加載自己的序列化模型,提供對自己的 prototxt 和模型文件的引用(第 30 行),可以看到在 OpenCV 3.3 中,這非常簡單。
下一步,我們初始化視頻流(來源可以是視頻文件或攝像頭)。首先,我們啟動 VideoStream(第 35 行),隨后等待相機啟動(第 36 行),***開始每秒幀數計算(第 37 行)。VideoStream 和 FPS 類是 imutils 包的一部分。
現在,讓我們遍歷每一幀(如果你對速度要求很高,也可以跳過一些幀):
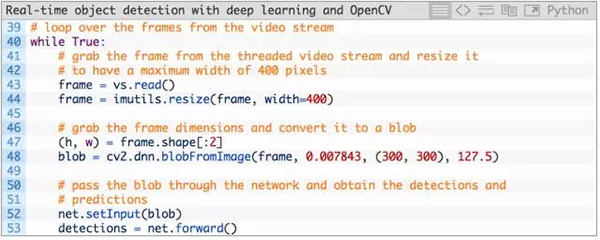
首先,我們從視頻流中讀取一幀(第 43 行),隨后調整它的大小(第 44 行)。由于我們隨后會需要寬度和高度,所以我們在第 47 行上進行抓取。隨后將 frame 轉換為一個有 dnn 模塊的 blob(第 48 行)。
現在,我們設置 blob 為神經網絡的輸入(第 52 行),通過 net 傳遞輸入(第 53 行),這給我們提供了 detections。
這時,我們已經在輸入幀中檢測到了目標,現在是時候看看置信度的值,以判斷我們能否在目標周圍繪制邊界框和標簽了:

我們首先在 detections 內循環,記住一個圖像中可以檢測到多個目標。我們還需要檢查每次檢測的置信度(即概率)。如果置信度足夠高(高于閾值),那么我們將在終端展示預測,并以文本和彩色邊界框的形式對圖像作出預測。讓我們逐行來看一下:
- 在 detections 內循環,首先我們提取 confidence 值(第 59 行)。
- 如果 confidence 高于***閾值(第 63 行),那么我們提取類標簽索引(第 67 行),并計算檢測到的目標的坐標(第 68 行)。
- 然后,我們提取邊界框的 (x, y) 坐標(第 69 行),之后將用于繪制矩形和文本。
- 我們構建一個文本 label,包含 CLASS 名稱和 confidence(第 72、73 行)。
- 我們還要使用類顏色和之前提取的 (x, y) 坐標在物體周圍繪制彩色矩形(第 74、75 行)。
- 通常,我們希望標簽出現在矩形上方,但是如果沒有空間,我們將在矩形頂部稍下的位置展示標簽(第 76 行)。
- ***,我們使用剛才計算出的 y 值將彩色文本置于幀上(第 77、78 行)。
幀捕捉循環剩余的步驟還包括:(1)展示幀;(2)檢查 quit 鍵;(3)更新 fps 計數器:
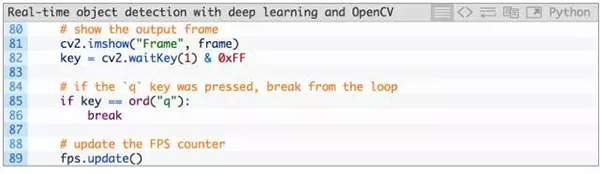
上述代碼塊簡單明了,首先我們展示幀(第 81 行),然后找到特定按鍵(第 82 行),同時檢查「q」鍵(代表「quit」)是否按下。如果已經按下,則我們退出幀捕捉循環(第 85、86 行)。***更新 fps 計數器(第 89 行)。
如果我們退出了循環(「q」鍵或視頻流結束),我們還要處理這些:
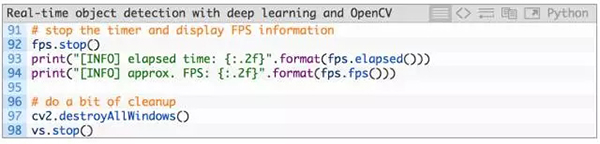
當我們跳出(exit)循環,fps 計數器 停止(第 92 行),每秒幀數的信息向終端輸出(第 93、94 行)。
我們關閉窗口(第 97 行),然后停止視頻流(第 98 行)。
如果你到了這一步,那就可以做好準備用自己的網絡攝像頭試試看它是如何工作的了。我們來看下一部分。
實時深度學習目標檢測的結果
為了實時深度學習目標檢測器正常運行,確保你使用本指南「Downloads」部分中的示例代碼和預訓練的卷積神經網絡。(請打開原文鏈接,進入「Downloads」部分,輸入自己的郵箱地址,獲取所需代碼和其他資料。)
打開終端,執行下列命令:
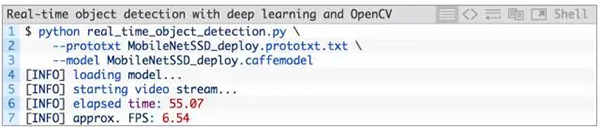
如果 OpenCV 能夠訪問你的攝像頭,你可以看到帶有檢測到的目標的輸出視頻幀。
注意深度學習目標檢測器不僅能夠檢測到人,還能檢測到人坐著的沙發和旁邊的椅子——所有都是實時檢測到的!
總結
今天的博客中,我們學習了如何使用深度學習 + OpenCV + 視頻流來執行實時目標檢測。我們通過下列兩個教程完成了這一目標:
- 使用深度學習和 OpenCV 進行目標檢測(http://www.pyimagesearch.com/2017/09/11/object-detection-with-deep-learning-and-opencv/)
- 在 OpenCV 上進行高效、線程化的視頻流(http://www.pyimagesearch.com/2016/01/04/unifying-picamera-and-cv2-videocapture-into-a-single-class-with-opencv/)
最終結果是基于深度學習的目標檢測器可以處理 6-8 個 FPS 的視頻(當然,這也取決于你的系統速度)。
你還可以通過以下途徑進一步提升速度:
- 跳過幀。
- 使用 MobileNet 的不同變體(速度更快,但是準確率下降)。
- 使用 SqueezeNet 的量子化變體(我還未對此進行測試,但是我想應該會更快,因為它的網絡足跡更小)。
原文:
http://www.pyimagesearch.com/2017/09/18/real-time-object-detection-with-deep-learning-and-opencv/
【本文是51CTO專欄機構“機器之心”的原創譯文,微信公眾號“機器之心( id: almosthuman2014)”】