













3000行代碼實現迷你版波士頓Spot:我要做踩不死的小強!
波士頓的機器狗前段時間已經開售了,但是價格有點不美麗。網上開源的機器狗數不勝數,該選哪個?近日,一款名為Bittle的機器狗登上了kickstarter的眾籌榜,神似波士頓Spot,3000行代碼就實現了所有算法。
波士頓動力狗很好玩,但是動輒幾十萬的售價著實有點消受不起。
為了解開大家的「波士頓」情結,一個名為Petoi Bittle的迷你版波士頓動力狗應運而生,它只有 手掌般大小,還是組裝式的,你甚至可以放進口袋里。

翻身越障,還支持添加TensorFlow的AI模型
看起來是不是很cute?它絕非看上去這么簡單,大波士頓狗能做的事,它基本也能做到,還有很多模式可選,比如有時會調皮的像一只寵物狗。
先來看看它有什么技能吧!
平穩桌面加速跑。
越障翻身,手到擒來。

加個Arduido或者樹莓派,用TensorFlow賦能,瞬間化身智能狗,輕松實現目標跟蹤。

踩不死的小「波士頓」,全身3D打印Arduido驅動
可以看到,Bittle 用四條腿而不是輪子移動,步行給了它更多的自由度,可以行走在各種非結構化的地中。這種動態可操作性一般只見于波士頓Spot這樣的豪華機器人,但是Bittle的創造者們想出了一個草根解決方案來簡化這個系統。

Bittle 由四個主要部件組成: 身體框架、執行器、電子設備、電池,然后軟件來協調所有的硬件執行各種任務,整個系統簡潔高效。

現在我們先把它拆開。
上面的所有部件都是3 d 打印出來的,因為使用了高強度注塑成型塑料,所以它可以很好地抵抗外界壓力。
在壓力測試中,組裝好的機器人可以承受一個成年人的踩踏而不會受損!
當然,防沖撞不僅僅依靠高強度的身體,Bittle的柔韌性也很好,四肢的彈簧可以起到一定的緩沖作用,如果遭受的壓力過大,它會非常聰明地按指定的「薄弱環節」分解,然后很容易二次安裝或更換。

Bittle的執行機構是伺服電機,它使用九個 P1S 伺服系統來驅動 。其中八個是用來走路的關節,一個用來搖頭。

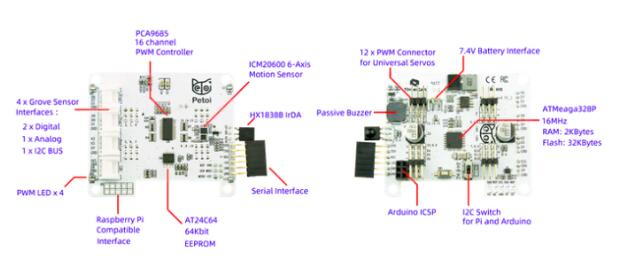
Bittle的一切活動由「大腦」NyBoard v 1驅動,這是一個定制的 Arduino 板子,帶有豐富的傳感器。該板可以驅動至少12個 PWM 伺服系統,并且有一個 IMU (慣性導航系統)用于平衡整個身體。
此外,你還可以通過一個紅外遙控器來觸發基本動作,比如「行走」、「坐下」,或其他更詳細的指令。
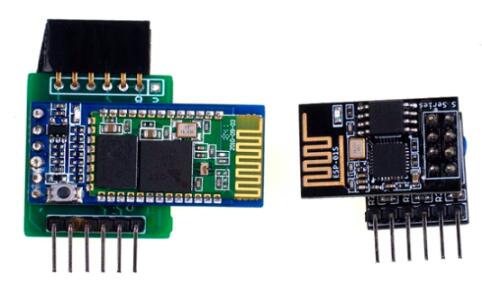
Bittle還自帶了一個藍牙模塊,可用于無線上傳下載代碼,并通過個人電腦或智能手機應用程序控制它。除了藍牙,還有一個支持無線通信的 WiFi 模塊,當用Bittle學習平衡相關的運動規劃時,就不用連一堆線了。
你甚至可以利用遠程「大腦」的計算能力,而不必拘泥于 Bittle 本身的負載限制。
目前Bittle項目在kickstarter上發起了眾籌,已經籌集到了足夠的資金,相信不久我們就能看到成熟的產品了。

不光身體小,數據結構和算法實現也很精煉
如果等不急的話,可以試著自己做一個,Bittle的代碼也已經在GitHub開源,奇怪,為什么不是OpenDog呢?
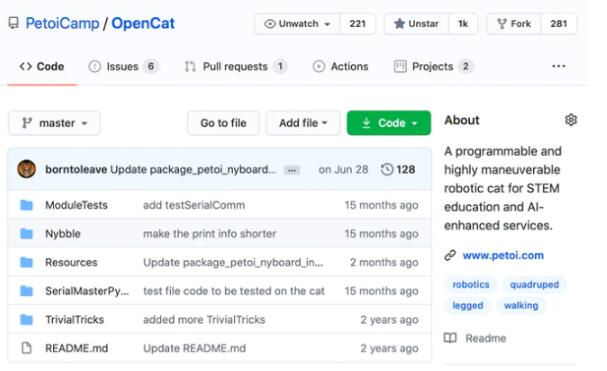
整個Bittle由 OpenCat 的代碼驅動,除去第三方庫的話,大概只有3000行代碼。
如果看代碼,你會發現它定義了執行四足運動的最小數據結構和算法。同樣也提供了Python接口,可以方便地從其他設備給Bittle發送指令。
你可以在不同的編碼環境中對 Bittle 進行不同級別的編程,比如在 Arduino IDE 中使用 C,在終端中使用 Python。都不熟悉?沒關系,還有拖拽式編程可用。
Bittle涵蓋了3D打印、機械工程、電子工程和編程的方方面,如果能夠從零到一做出一個Bittle,對個人的思維和動手能力都將有很大的提升,可以作為STEM教育的輔助工具。
一起來組裝一個吧!




















