













谷歌AI最新3D數據集,1.5萬張動圖,讓AR主宰你的生活
本文經AI新媒體量子位(公眾號ID:QbitAI)授權轉載,轉載請聯系出處。
見過3D物體數據集,見過會動的3D物體數據集嗎?
每段動態視頻都以目標為中心拍攝,不僅自帶標注整體的邊界框,每個視頻還附帶相機位姿和稀疏點云。
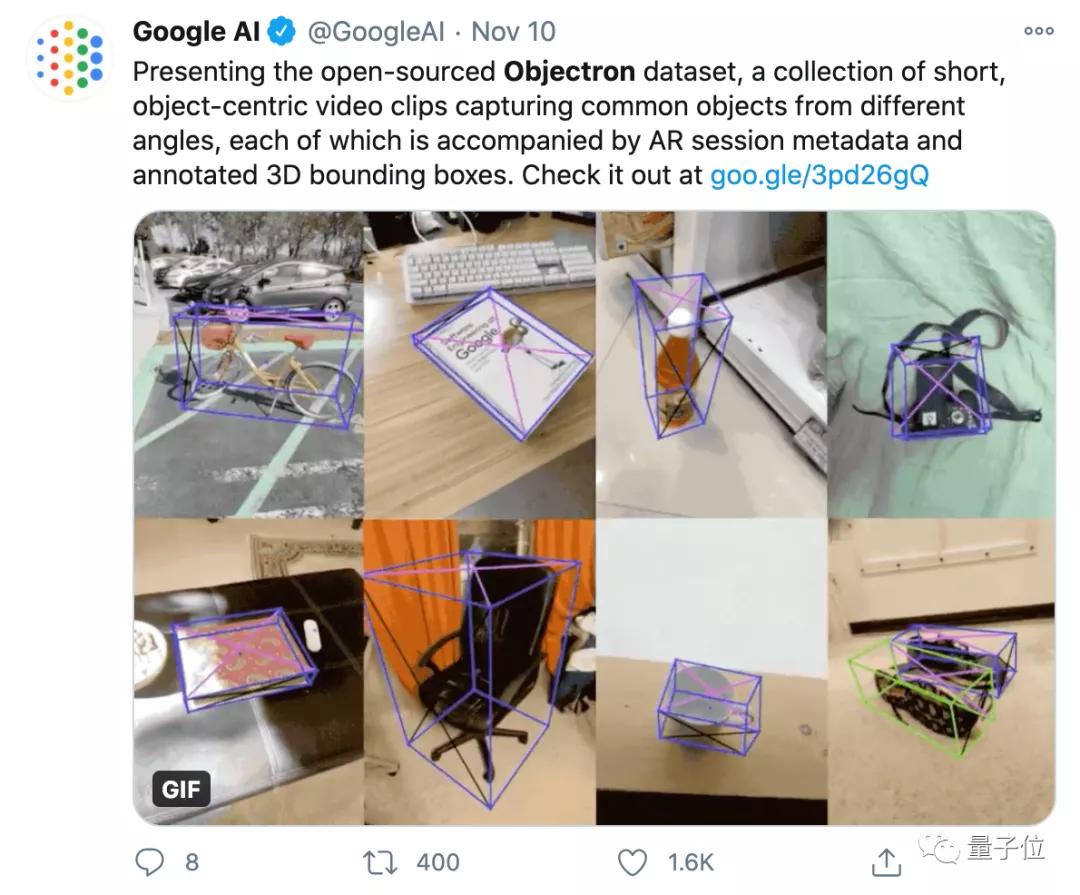
這是谷歌的開源3D物體數據集Objectron,包含15000份短視頻樣本,以及從五個大洲、十個國家里收集來的400多萬張帶注釋的圖像。
谷歌認為,3D目標理解領域,缺少像2D中的ImageNet這樣的大型數據集,而Objectron數據集能在一定程度上解決這個問題。
數據集一經推出,1.6k網友點贊。
有網友調侃,谷歌恰好在自己想“谷歌”這類數據集的時候,把它發了出來。

也有團隊前成員表示,很高興看到這樣的數據集和模型,給AR帶來進步的可能。

除此之外,谷歌還公布了用Objectron數據集訓練的針對鞋子、椅子、杯子和相機4種類別的3D目標檢測模型。
來看看這個數據集包含什么,以及谷歌提供的3D目標檢測方案吧~(項目地址見文末)
9類物體,對AR挺友好
目前,這個數據集中包含的3D物體樣本,包括自行車,書籍,瓶子,照相機,麥片盒子,椅子,杯子,筆記本電腦和鞋子。

當然,這個數據集,絕不僅僅只是一些以物體為中心拍攝的視頻和圖像,它具有如下特性:
注釋標簽(3D目標立體邊界框)
用于AR數據的數據(相機位姿、稀疏點云、二維表面)
數據預處理(圖像格式為tf.example,視頻格式為SequenceExample)
支持通過腳本運行3D IoU指標的評估
支持通過腳本實現Tensorflow、PyTorch、JAX的數據加載及可視化,包含“Hello World”樣例
支持Apache Beam,用于處理谷歌云(Google Cloud)基礎架構上的數據集
所有可用樣本的索引,包括訓練/測試部分,便于下載
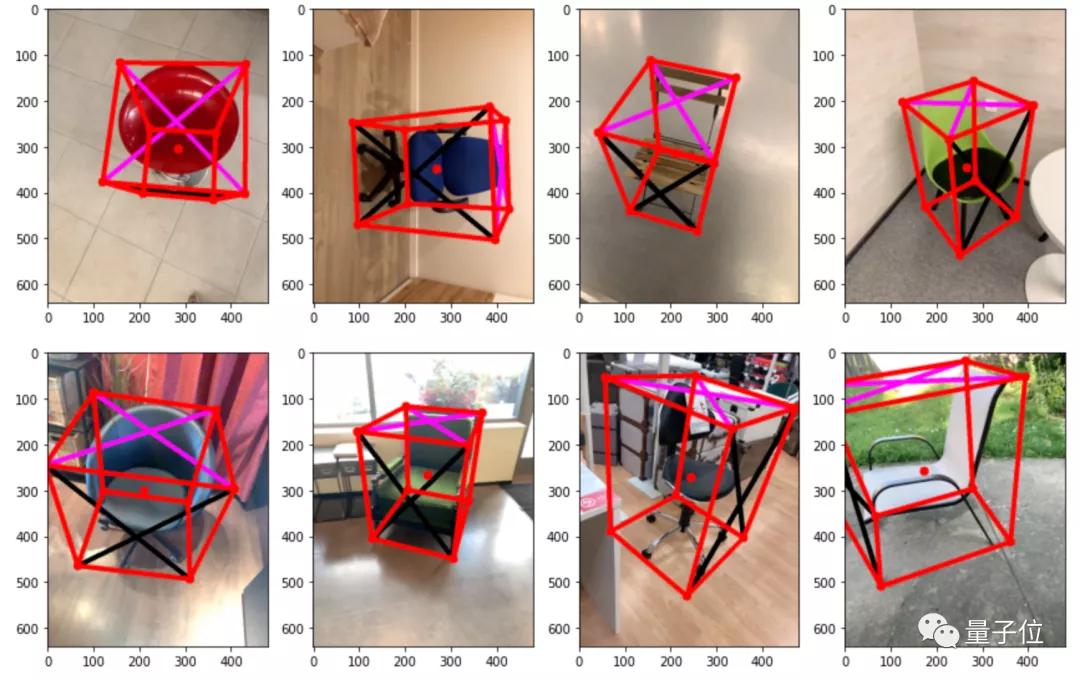
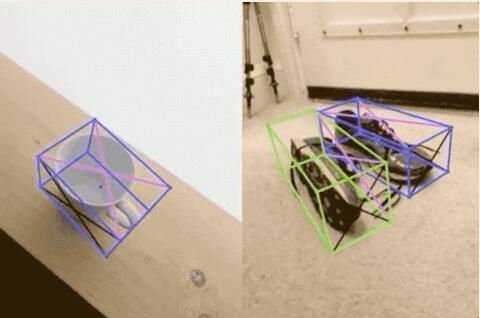
圖像部分的畫風,基本是這樣的,也標注得非常詳細:
而在視頻中,不僅有從各個角度拍攝的、以目標為中心的片段(從左到右、從下到上):
也有不同數量的視頻類型(一個目標、或者兩個以上的目標):
谷歌希望通過發布這個數據集,讓研究界能夠進一步突破3D目標理解領域,以及相關的如無監督學習等方向的研究應用。
怎么用?谷歌“以身示范”
拿到數據集的第一刻,并不知道它是否好用,而且總感覺有點無從下手?
別擔心,這個數據集的訓練效果,谷歌已經替我們試過了。
看起來還不錯:

此外,谷歌將訓練好的3D目標檢測模型,也一并給了出來。(傳送見文末)
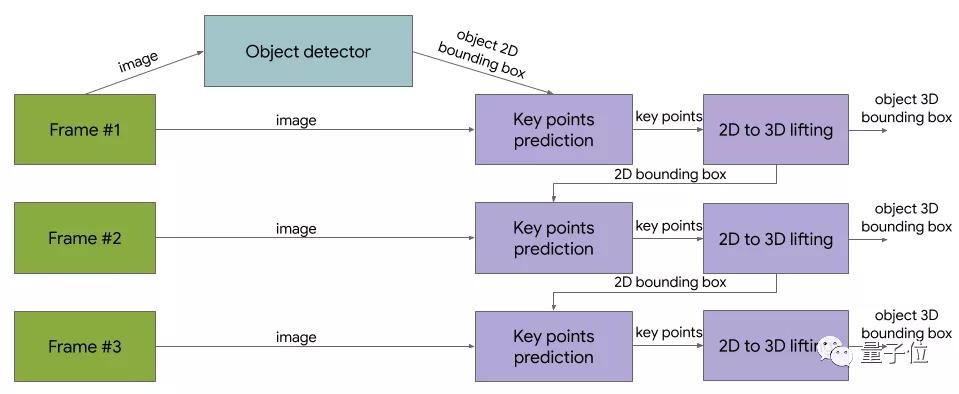
算法主要包括兩部分,第一部分是Tensorflow的2D目標檢測模型,用來“發現物體的位置”;
第二部分則進行圖像裁剪,來估計3D物體的邊界框(同時計算目標下一幀的2D裁剪,因此不需要運行每個幀),整體結構如下圖:
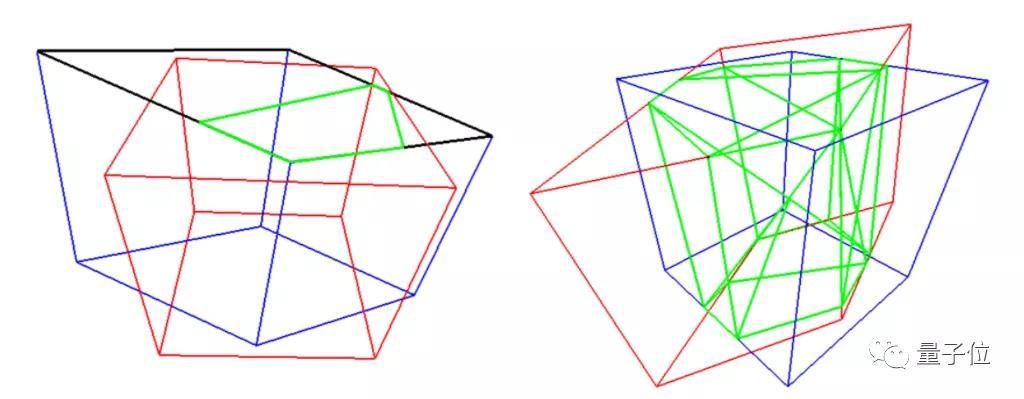
在模型的評估上,谷歌采用了Sutherland-Hodgman多邊形裁剪算法,來計算兩個立體邊界框的交點,并計算出兩個立方體的相交體積,最終計算出3D目標檢測模型的IoU。
簡單來說,兩個立方體重疊體積越大,3D目標檢測模型效果就越好。
這個模型是谷歌推出的MediaPipe中的一個部分,后者是一個開源的跨平臺框架,用于構建pipeline,以處理不同形式的感知數據。
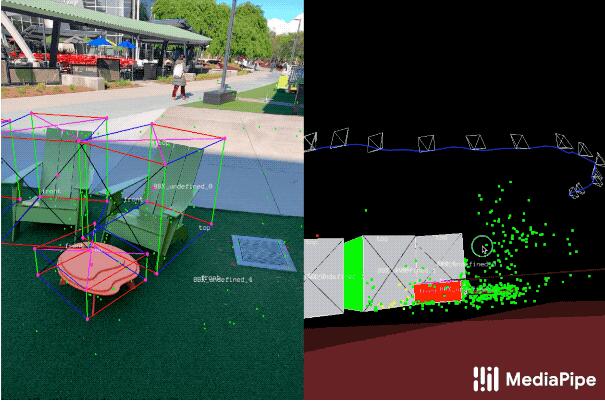
它推出的MediaPipe Objectron實時3D目標檢測模型,用移動設備(手機)就能進行目標實時檢測。
看,(他們玩得多歡快)實時目標檢測的效果還不錯:

其他部分3D數據集
除了谷歌推出的數據集以外,此前視覺3D目標領域,也有許多類型不同的數據集,每個數據集都有自己的特點。
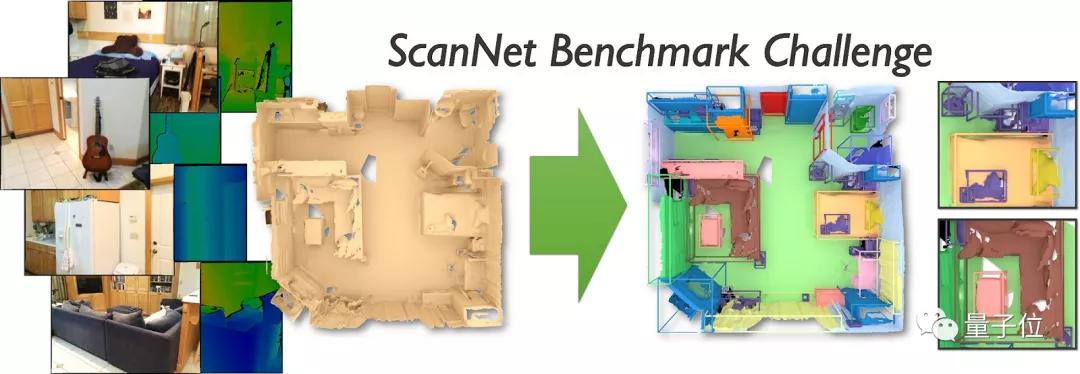
例如斯坦福大學等提出的ScanNetV2,是個室內場景數據集,而ScanNet則是個RGB-D視頻數據集,一共有21個目標類,一共1513個采集場景數據,可做語義分割和目標檢測任務。
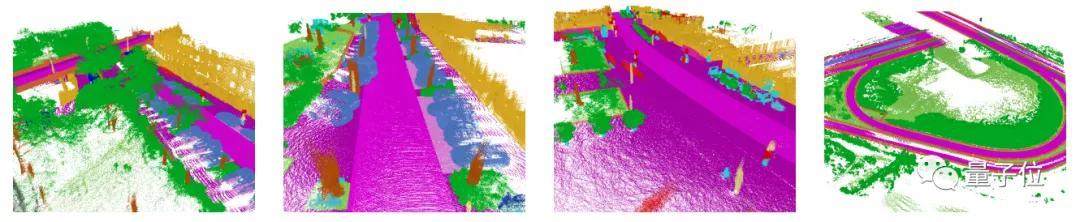
而目前在自動駕駛領域非常熱門的KITTI數據集,也是一個3D數據集,是目前最大的自動駕駛場景下計算機視覺的算法評測數據集,包含市區、鄉村和高速公路等場景采集的真實圖像數據。

此外,還有Waymo、SemanticKITTI、H3D等等數據集,也都用在不同的場景中。(例如SemanticKITTI,通常被專門用于自動駕駛的3D語義分割)
無論是視頻還是圖像,這些數據集的單個樣本基本包含多個目標,使用場景上也與谷歌的Objectron有所不同。
感興趣的小伙伴們,可以通過下方傳送門,瀏覽谷歌最新的3D目標檢測數據集,以及相關模型~
Objectron數據集傳送門:
https://github.com/google-research-datasets/Objectron/
針對4種物體的3D目標檢測模型:
https://google.github.io/mediapipe/solutions/objectron




















