













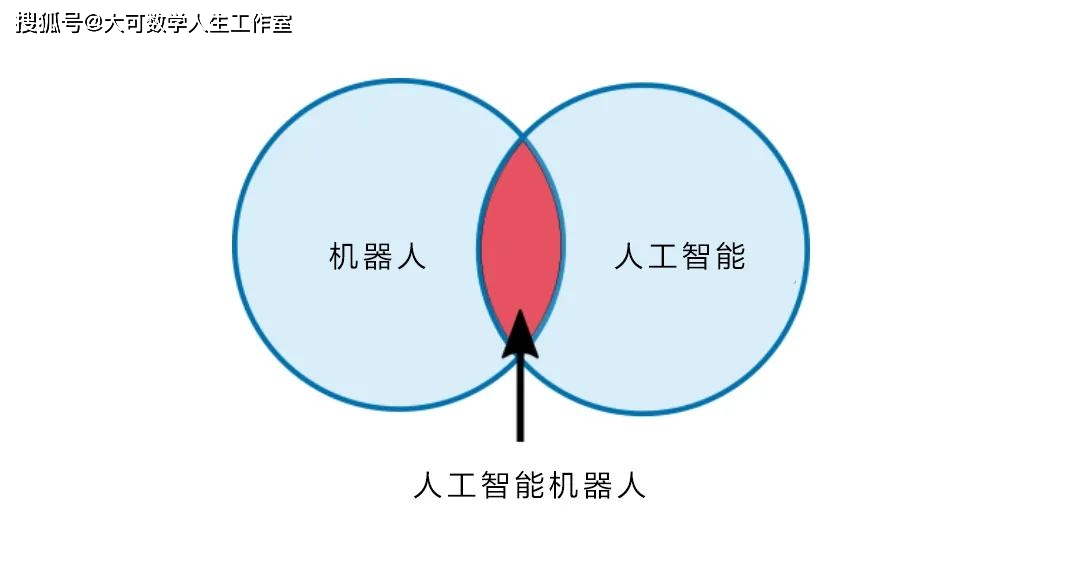
人工智能≠機(jī)器人!
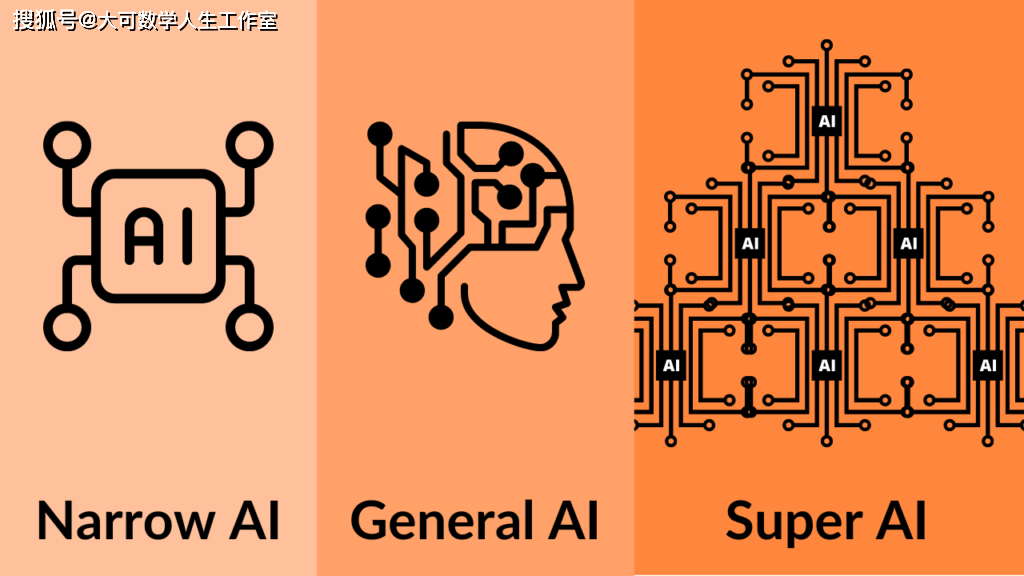
隨著科技創(chuàng)新成為時(shí)代主旋律,相信諸如“自動(dòng)駕駛?cè)〈緳C(jī)”、“50%以上的工作崗位將會(huì)被AI取代”以及“機(jī)器人大規(guī)模列裝,無人工廠成真”之類的新聞標(biāo)題早已充斥著各位的手機(jī)屏幕。 但這種技術(shù)名詞的濫用往往會(huì)在不經(jīng)意間使大眾混淆“機(jī)器人”與“人工智能”(AI)兩個(gè)概念。 機(jī)器人技術(shù)是AI的一部分嗎?AI是機(jī)器人技術(shù)的一部分嗎?這兩個(gè)名詞的區(qū)別是什么?通過今天的這篇文章,我們來解答這些問題。 首先要說明的是,機(jī)器人和人工智能完全不是一回事,二者的目的非常不同。甚至可以說,這兩個(gè)領(lǐng)域幾乎是完全各自獨(dú)立的。 人工智能(AI)是計(jì)算機(jī)科學(xué)的一個(gè)分支,它涉及開發(fā)計(jì)算機(jī)程序來完成原本需要人類智慧的任務(wù)。AI算法可以解決學(xué)習(xí)、感知、解決問題、語言理解和/或邏輯推理。 人工智能有兩大類:通用人工智能(General AI,AGI)和狹義人工智能(Narrow AI),有時(shí)還會(huì)從通用人工智能中分化出遠(yuǎn)超人類的超人工智能(Super AI)。 廣義人工智能指的是與人類智力相當(dāng)或更高的整體系統(tǒng),它可以完成各種任務(wù),從下棋到在商店里招呼顧客,再到創(chuàng)作藝術(shù)品。除了馬斯克這樣的樂觀主義者外,大多數(shù)專家認(rèn)為,我們距離看到可以超越人類的AI還有幾十年的時(shí)間。 當(dāng)下,實(shí)現(xiàn)通用人工智能最根本的障礙是,人類首選需要了解所謂的“智能”是如何運(yùn)作的,然而這是一個(gè)巨大的難題,亟待腦科學(xué)方面的突破。 但人類在狹義人工智能領(lǐng)域已經(jīng)取得了相當(dāng)大的進(jìn)展。在現(xiàn)代世界中,狹義人工智能(或弱人工智能)被用于許多方面,這些系統(tǒng)可以在嚴(yán)格的參數(shù)內(nèi)執(zhí)行離散的任務(wù),例如: 不難發(fā)現(xiàn),這些任務(wù)可以歸納為三類智能:感知、推理和溝通,而且大多數(shù)AI程序與大眾想象中的“機(jī)器人控制”并無關(guān)系。 以蘋果的Siri語音助手為例,首先,它使用語音識(shí)別算法來捕捉人們的問話(“感知”),然后使用自然語言處理來理解這串詞的含義并確定一個(gè)答案(“推理”),最后使用自然語言生成這個(gè)答案并將其轉(zhuǎn)達(dá)給用戶(“溝通”)。
那么人工智能系統(tǒng)是如何走到這一步的呢? 自從20世紀(jì)40年代艾倫·圖靈(Alan Turing)和他同時(shí)代的科學(xué)家開發(fā)出第一臺(tái)復(fù)雜的計(jì)算機(jī)以來,思維機(jī)器的概念就已經(jīng)存在了。 艾倫·圖靈
1956年的達(dá)特茅斯學(xué)院大會(huì)通常被認(rèn)為是AI發(fā)展的里程碑時(shí)刻,當(dāng)時(shí)計(jì)算機(jī)科學(xué)家們聚集在一起,在“人工智能之父”馬文·明斯基(Marvin Minsky)的推動(dòng)下,將人工智能作為一個(gè)獨(dú)立的領(lǐng)域進(jìn)行研究。 馬文·明斯基
然而,盡管早期該領(lǐng)域獲得了科學(xué)家的廣泛熱情和各界大量資金支持,但人工智能的最初進(jìn)展依然步履蹣跚,慢的令人失望。 DARPA(美國(guó)國(guó)防部高級(jí)研究計(jì)劃局)曾在20世紀(jì)60年代向高校體系投入了數(shù)百萬美元,希望機(jī)器翻譯能夠增強(qiáng)其反間諜能力,但由于機(jī)器翻譯領(lǐng)域缺乏進(jìn)展,他們的態(tài)度也變得消極。 與此同時(shí),在英國(guó),1973年由詹姆斯·萊特希爾(James Lighthill)領(lǐng)導(dǎo)的一個(gè)人工智能政府委員會(huì)提出了嚴(yán)重的質(zhì)疑,認(rèn)為人工智能研究領(lǐng)域只會(huì)以漸進(jìn)的速度發(fā)展。 其結(jié)果是,美英兩國(guó)乃至整個(gè)西方世界的政府資助被大幅削減。 整個(gè)20世紀(jì),人工智能在政策制定者和公眾意識(shí)中的地位一直是起起伏伏。往往是一個(gè)新的發(fā)展會(huì)引發(fā)一波熱情和資金的激增,但由于承諾的創(chuàng)新未能實(shí)現(xiàn),人們的興趣又急劇下降,進(jìn)而導(dǎo)致失去資源支持。 為什么人工智能在20世紀(jì)進(jìn)展如此緩慢?究其原因與研究人員在開發(fā)軟件時(shí)采用的方法有關(guān)。 20世紀(jì)的大多數(shù)人工智能應(yīng)用都采取了專家系統(tǒng)的形式,這些系統(tǒng)基于一系列精心開發(fā)的“if-then”規(guī)則,可以指導(dǎo)基本的決策。 雖然專家系統(tǒng)對(duì)于處理一個(gè)包含的任務(wù)很有用(比如在 ATM 機(jī)中取錢),但它們卻很難處理那些不容易被編入規(guī)則的請(qǐng)求。 例如,很難編寫規(guī)則來確定一個(gè)類似人類的物體是人體模型還是真人,或者核磁共振掃描(MRI)上的深色圖案是腫瘤還是良性組織。這些任務(wù)往往依賴于那些難以表述的“隱性知識(shí)”。 只有當(dāng)新的人工智能方法投入使用時(shí),才取得了重大突破,而機(jī)器學(xué)習(xí)(Machine Learning)就是這類“新方法”中最具代表性的一個(gè)。 機(jī)器學(xué)習(xí)不需要從頭開始編寫規(guī)則,而是通過使用現(xiàn)有的數(shù)據(jù)(例如,圖像被標(biāo)記為人體模型或真人,MRI掃描被標(biāo)記為惡性或良性腫瘤)來“訓(xùn)練”算法。
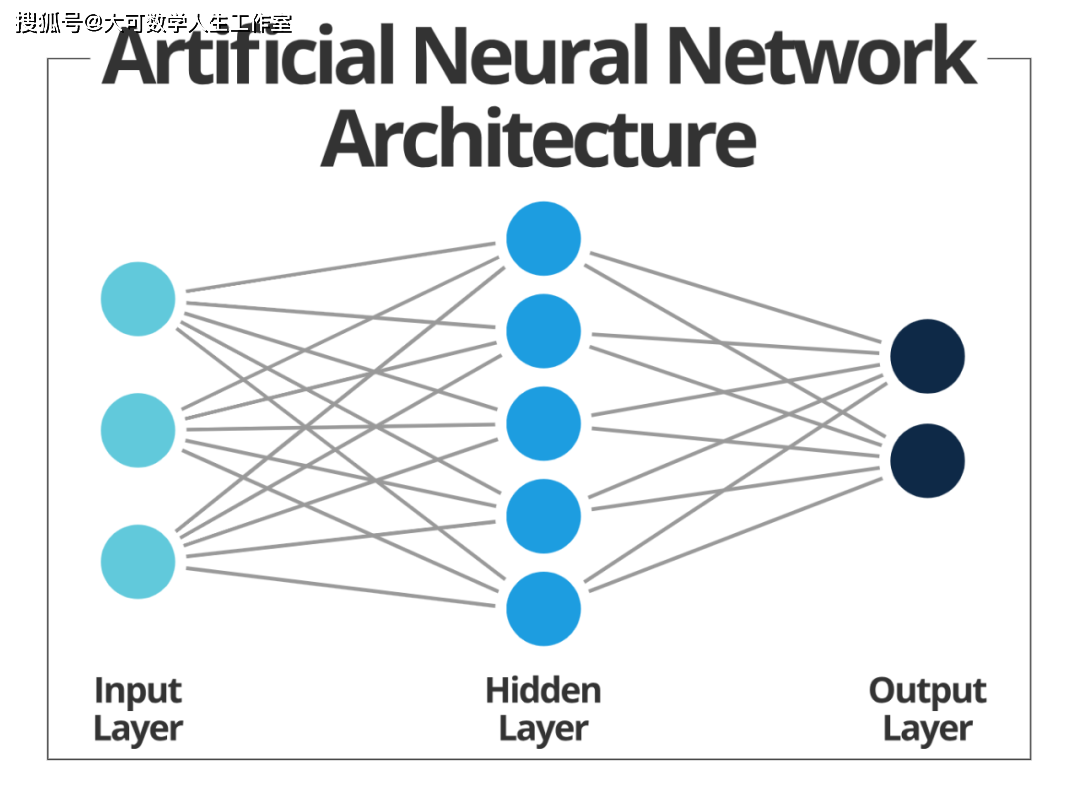
反過來,這些算法每檢測(cè)出一種模式,就會(huì)創(chuàng)建一個(gè)通用規(guī)則來理解未來的輸入,以此形成良性循環(huán)。目前,機(jī)器學(xué)習(xí)算法已被應(yīng)用于多個(gè)領(lǐng)域,從發(fā)現(xiàn)銀行欺詐交易到幫助人力資源團(tuán)隊(duì)在招聘員工時(shí)篩選簡(jiǎn)歷申請(qǐng),任務(wù)多樣。 過去的十多年里,機(jī)器學(xué)習(xí)在一直在人工智能領(lǐng)域獨(dú)領(lǐng)風(fēng)騷。但在最近的幾年,人們的注意力已經(jīng)轉(zhuǎn)向了機(jī)器學(xué)習(xí)的一個(gè)子領(lǐng)域——深度學(xué)習(xí)(Deep Learning)。 深度學(xué)習(xí)系統(tǒng)是由“人工神經(jīng)網(wǎng)絡(luò)”(Artificial Neural Networks)組成的,它有多層,每一層都被賦予了對(duì)圖像、聲音或文本中不同模式進(jìn)行理解的任務(wù)。 第一層可以識(shí)別原始模式,例如圖像中物體的輪廓,而第二層可以用來識(shí)別該圖像中的顏色帶。數(shù)據(jù)通過多層輸入,直到系統(tǒng)能夠?qū)⒛J骄垲悶椴煌念悇e,例如物體或文字。根據(jù)倫敦國(guó)王學(xué)院的一項(xiàng)研究,當(dāng)使用核磁共振掃描的原始數(shù)據(jù)時(shí),深度學(xué)習(xí)技術(shù)將大腦年齡評(píng)估的準(zhǔn)確性提高了一倍以上。 而除了以上方法外,其他重要的人工智能方法還包括監(jiān)督式學(xué)習(xí)、強(qiáng)化學(xué)習(xí)和遷移學(xué)習(xí): 監(jiān)督學(xué)習(xí)(Supervised learning):算法一開始就可以通過監(jiān)督或者非監(jiān)督式學(xué)習(xí)兩種方式進(jìn)行訓(xùn)練。 監(jiān)督式學(xué)習(xí)意味著算法被賦予標(biāo)記數(shù)據(jù),它們從這些數(shù)據(jù)中提取模式,得出一個(gè)通用的規(guī)則來理解未來的數(shù)據(jù)。大多數(shù)機(jī)器學(xué)習(xí)和深度學(xué)習(xí)算法都是使用監(jiān)督過程來訓(xùn)練的。非監(jiān)督式學(xué)習(xí)是指給算法提供未標(biāo)記的數(shù)據(jù),并自行發(fā)現(xiàn)模式。例子包括營(yíng)銷公司使用的人群細(xì)分,以及一些網(wǎng)絡(luò)安全軟件。 強(qiáng)化學(xué)習(xí)(Reinforcement learning):有些算法只編寫或訓(xùn)練一次,而強(qiáng)化學(xué)習(xí)則是利用正反饋機(jī)制,在使用過程中不斷調(diào)整和改進(jìn)算法。 短視頻和網(wǎng)購(gòu)中的推薦系統(tǒng)就是強(qiáng)化學(xué)習(xí)的一個(gè)例子。每當(dāng)消費(fèi)者購(gòu)買一件產(chǎn)品(一本書、一條記錄或一件衣服)時(shí),算法都會(huì)自動(dòng)調(diào)整,以便在未來推薦時(shí)將這些行為考慮進(jìn)去。 遷移學(xué)習(xí)(Transfer learning):遷移學(xué)習(xí)是指將一個(gè)在某一領(lǐng)域開發(fā)的算法進(jìn)行修改,以用于另一個(gè)領(lǐng)域,而不必從頭開始,也不必將大量原始數(shù)據(jù)和標(biāo)簽數(shù)據(jù)作為來源。 要說明的是,上述人工智能的方法并不一定是相互排斥的,往往可以結(jié)合使用。 說罷人工智能,再來談?wù)剻C(jī)器人(Robotics)。機(jī)器人學(xué)包括設(shè)計(jì)、制造和編程能夠與物理世界互動(dòng)的物理機(jī)器人。機(jī)器人技術(shù)中只有一小部分涉及人工智能。 通常,構(gòu)成機(jī)器人有三個(gè)重要因素: 機(jī)器人通過傳感器和執(zhí)行器與物理世界進(jìn)行互動(dòng); 機(jī)器人是可以編程的; 機(jī)器人通常是自主或半自主的。 因此,雖然拖拉機(jī)、建筑挖掘機(jī)和縫紉機(jī)有運(yùn)動(dòng)部件,可以完成人工任務(wù),但它們需要人類長(zhǎng)期(如果不是連續(xù))監(jiān)督,所以不屬于機(jī)器人。 相比之下,倉(cāng)庫(kù)里的揀貨和包裝機(jī)器,以及升降和搬運(yùn)病人的“護(hù)理機(jī)器人”,都是在部分自主的情況下完成任務(wù)的,因此它們會(huì)被歸為機(jī)器人。 “機(jī)器人”一詞最早出現(xiàn)在1921年卡雷爾·卡佩克(Karel Capek)創(chuàng)作的一部科幻劇中,該劇講述了在一個(gè)社會(huì)中,克隆人被當(dāng)做奴隸,結(jié)果機(jī)器人推翻了主人的故事。
直到20世紀(jì)50年代,機(jī)器人仍是科幻小說的專利,彼時(shí)全世界第一家工業(yè)機(jī)器人公司Unimation剛剛成立。它發(fā)明了一種突破性的近2噸重的機(jī)械臂,可以根據(jù)預(yù)先編程的指令取放物品,是工廠里搬運(yùn)重物的理想選擇。 1961年,Unimate機(jī)器人在通用汽車公司首次亮相,它被用來運(yùn)送熱的壓鑄金屬件,并將其焊接到汽車車身部件上。 不久后的1969年,機(jī)器人先驅(qū)維克多·舍恩曼(Victor Scheinman )開發(fā)了斯坦福臂(Stanford Arm),這是世界上第一個(gè)電動(dòng)關(guān)節(jié)型機(jī)器人臂。它被看作是機(jī)器人技術(shù)的一個(gè)突破,因?yàn)樗?軸上操作,比以前的單軸或雙軸機(jī)器有更大的運(yùn)動(dòng)自由度。
斯坦福臂標(biāo)志著關(guān)節(jié)型機(jī)器人革命的開始,它改變了制造業(yè)的裝配線,并推動(dòng)了包括庫(kù)卡(Kuka)和ABB機(jī)器人在內(nèi)的多家商業(yè)機(jī)器人公司的發(fā)展。 多年來,關(guān)節(jié)型機(jī)器人已經(jīng)承擔(dān)了從焊接鋼材到組裝汽車,再到給白色家電加漆等各種各樣的功能。國(guó)際機(jī)器人聯(lián)合會(huì)(International Federation of Robotics)估計(jì)目前全球工業(yè)機(jī)器人的數(shù)量為270萬臺(tái)。 在20世紀(jì)的大部分時(shí)間里,機(jī)器人行業(yè)仍然集中關(guān)注關(guān)節(jié)型機(jī)械臂。然而,正如人工智能領(lǐng)域一樣,在千禧年之交,情況開始發(fā)生變化。 本田公司的ASIMO機(jī)器人于2000年亮相,是首批能夠用兩條腿行走、識(shí)別手勢(shì)和回答問題的人形機(jī)器之一。
三年后,KIVA系統(tǒng)公司(現(xiàn)在的亞馬遜機(jī)器人公司)成立,提供移動(dòng)機(jī)器人,可以在復(fù)雜的配送倉(cāng)庫(kù)內(nèi)穿梭運(yùn)送貨物和托盤。 2000年代初,也是自動(dòng)駕駛汽車從實(shí)驗(yàn)室測(cè)試走向道路試驗(yàn)的時(shí)期。特別具有象征意義的是2004年DARPA的挑戰(zhàn)賽,這是同類獎(jiǎng)項(xiàng)中的第一個(gè)。任何人只要能夠讓自動(dòng)駕駛汽車跑完230公里的賽道,就可以獲得100萬美元的獎(jiǎng)金。 雖然這些機(jī)器人的功能、大小和環(huán)境各不相同,但它們都有一個(gè)共同的特點(diǎn):可移動(dòng)性。20世紀(jì)的關(guān)節(jié)型機(jī)器人往往只能固定在一個(gè)地方,但21世紀(jì)的機(jī)器人已經(jīng)動(dòng)了起來。 其中一個(gè)驅(qū)動(dòng)因素是人工智能和機(jī)器人技術(shù)的共生,復(fù)雜的軟件讓物理機(jī)器有能力處理無法預(yù)料的環(huán)境和事件。例如,強(qiáng)化學(xué)習(xí)意味著機(jī)器人現(xiàn)在可以模仿和學(xué)習(xí)人類。此外,將數(shù)據(jù)存儲(chǔ)在云端意味著機(jī)器人可以與網(wǎng)絡(luò)中的其他機(jī)器人學(xué)習(xí)和共享經(jīng)驗(yàn)。 另一方面,機(jī)器人技術(shù)的進(jìn)步也得益于硬件的創(chuàng)新。傳感器的改進(jìn)使機(jī)器人具備了在非結(jié)構(gòu)化環(huán)境中導(dǎo)航所需的視覺感知能力。與這些傳感器能力相匹配的是豐富且不斷增長(zhǎng)的物理世界數(shù)據(jù)庫(kù),包括新的3D圖像數(shù)據(jù)集,如谷歌或百度的3D街景地圖。 最后,材料科學(xué)也在飛速發(fā)展。硅膠和蜘蛛絲等更好的材料使機(jī)器人外觀看起來更銳利,而由壓電晶體管制成的“機(jī)械毛發(fā)”則像人的皮膚一樣敏感。此外,液壓泵也有改進(jìn),不僅摩擦力極小,而且可以實(shí)現(xiàn)卓越的控制水平。 綜合以上的因素,結(jié)果是機(jī)器人不再局限于工廠,而是可以在醫(yī)院病房、商店樓層和城市街道等各種環(huán)境中漫游。 更可喜的是,即使在工廠里,機(jī)器人也在不斷進(jìn)化。最新的機(jī)器被稱為“協(xié)作機(jī)器人”(co-bots),其設(shè)計(jì)目的是與人類工人協(xié)同工作,例如從料箱中揀出零件,從生產(chǎn)線上取出不良品,并完成簡(jiǎn)單的工作,如擰螺絲、涂膠和焊接。
另外,它們也非常容易重新編程,因此對(duì)小批量生產(chǎn)的企業(yè)很有吸引力,并且它們還具有扭矩傳感器,可以在人類接觸的情況下保持不動(dòng)。麻省理工學(xué)院與寶馬公司合作進(jìn)行的研究發(fā)現(xiàn),機(jī)器人與人類協(xié)作比人類單獨(dú)工作的工作效率高85%。 縱觀機(jī)器人技術(shù)的發(fā)展,可以看出現(xiàn)在的物理機(jī)器人主要有五種類型: 關(guān)節(jié)型機(jī)器人(Mobile robots):固定式機(jī)器人,其手臂至少有三個(gè)旋轉(zhuǎn)關(guān)節(jié),這種機(jī)器人通常出現(xiàn)在工業(yè)環(huán)境中。協(xié)作機(jī)器人是關(guān)節(jié)型機(jī)器人的最新迭代。 移動(dòng)機(jī)器人(Mobile robots):輪式或履帶式機(jī)器人,可以將貨物和人員從一個(gè)目的地運(yùn)送到另一個(gè)目的地。自動(dòng)駕駛汽車是移動(dòng)機(jī)器人能力的巔峰。 人形機(jī)器人(Humanoid robots):與人類生理上相似并試圖模仿人類能力的機(jī)器人。軟銀聲稱其Pepper機(jī)器人是第一個(gè)能夠識(shí)別人類情緒并相應(yīng)調(diào)整其行為的機(jī)器人。 假肢機(jī)器人(Prosthetic robots):可以穿戴或操作的機(jī)器人,讓人們獲得更大的力量,包括殘疾人或從事危險(xiǎn)工作的工人。大眾更熟悉的名詞是“外骨骼”。 蛇形機(jī)器人(Serpentine robots):由多個(gè)部分和關(guān)節(jié)組成的蛇形機(jī)器人,可以極其靈活地移動(dòng)。由于蛇形機(jī)器人能夠穿越困難的地形和在狹窄的空間中移動(dòng),因此在工業(yè)檢測(cè)和搜救任務(wù)中得到了應(yīng)用。 從以上的描述可以了解,大多數(shù)機(jī)器人都不是“智能”的。即使AI被用于控制機(jī)器人,AI算法也只是更大的機(jī)器人系統(tǒng)的一部分,該系統(tǒng)還包括傳感器、執(zhí)行器和非AI程序。 直到現(xiàn)在,所有的工業(yè)機(jī)器人都只能通過編程來進(jìn)行一系列重復(fù)性的動(dòng)作,這些動(dòng)作顯然并不需要人工智能。然而,非智能機(jī)器人的功能相當(dāng)有限。 當(dāng)你想讓機(jī)器人執(zhí)行更復(fù)雜的任務(wù)時(shí),人工智能算法是必要的。
例如,倉(cāng)儲(chǔ)機(jī)器人可能會(huì)使用路徑搜索算法在倉(cāng)庫(kù)周圍導(dǎo)航;無人機(jī)可能會(huì)在電池快用完的時(shí)候使用自主導(dǎo)航返回家中;自動(dòng)駕駛汽車可能會(huì)結(jié)合使用人工智能算法來檢測(cè)和避免道路上的潛在危險(xiǎn)。這些都是人工智能機(jī)器人的例子。 如果要問我人工智能和機(jī)器人技術(shù)這兩項(xiàng)技術(shù)在未來幾年和幾十年將如何發(fā)展,恐怕很難給出好的答案。深度學(xué)習(xí)算法可能會(huì)走入死胡同,而仿人機(jī)器人也可能只是一種幻想。 有觀察家已經(jīng)提出,全球范圍內(nèi)的人工智能泡沫正在膨脹,而機(jī)器人的“人工”程度超過了“智能”程度。 但我們可以比較肯定地說,只要算力、數(shù)據(jù)采集和存儲(chǔ)、通用基礎(chǔ)設(shè)施以及研究投資沒有停下來,那么這些技術(shù)將繼續(xù)以這樣或那樣的方式繼續(xù)發(fā)展。繼那之后,我們更應(yīng)該警惕的是AI、機(jī)器人以及二者結(jié)合后所產(chǎn)生的社會(huì)性影響。 參考資料: [1]https://medium.com/@thersa/what-is-the-difference-between-ai-robotics-d93715b4ba7f人工智能正當(dāng)時(shí)
圖像識(shí)別(Image recognition):最典型的是公安機(jī)關(guān)的“天網(wǎng)”系統(tǒng);
自然語言處理(Natural language processing):蘋果的Siri、阿里巴巴的“天貓精靈”和百度的“小度”等AI助手的語音識(shí)別;
信息檢索(Information retrieval);各大搜索引擎;
利用邏輯或證據(jù)進(jìn)行推理(Reasoning using logic or evidence):金融機(jī)構(gòu)用于抵押貸款核銷或確定欺詐的可能性。
人工智能的歷史演進(jìn)

機(jī)器人的世界

走出藩籬的機(jī)器人
人工智能機(jī)器人:機(jī)器人和AI的橋梁
未來會(huì)怎樣?

























