機器用上AI后,擁有了堪比人類皮膚的觸覺丨Science子刊
本文經(jīng)AI新媒體量子位(公眾號ID:QbitAI)授權(quán)轉(zhuǎn)載,轉(zhuǎn)載請聯(lián)系出處。
你見過能靈活夾取雞蛋、可取可放的機器人嗎?
不僅如此,甚至還能穿針引線:
就算是往它拿著的瓶子里倒水,也不會掉:
這是來自香港城市大學(xué)、香港大學(xué)、CMU和南方科技大學(xué)的科學(xué)家,聯(lián)手打造出的一款機器人觸覺皮膚,效果堪比人類皮膚——
不僅可以精準(zhǔn)感知到力度方向和大小,還能準(zhǔn)確定位外界刺激的位置。
目前,這一研究成果已登上Science子刊《Science Robotics》。
這樣神奇的觸覺皮膚,究竟是怎么做出來的?
將AI與磁性薄膜結(jié)合
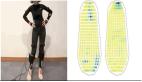
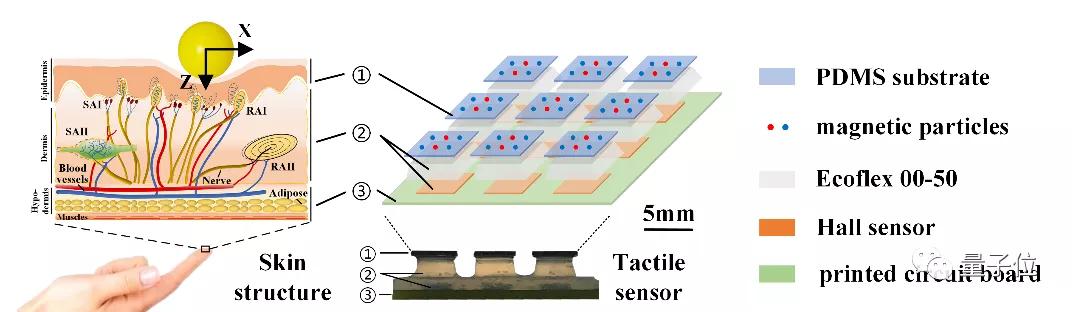
首先,這種磁性皮膚,用到了一種基于磁性薄膜的觸覺傳感器,來感知力的大小與方向。
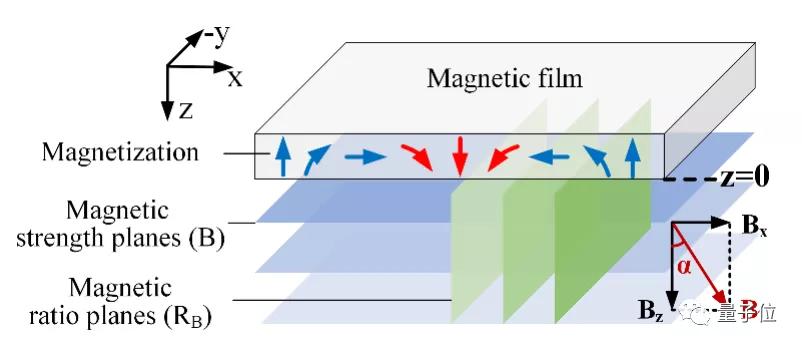
這種觸覺傳感器的核心,由一層經(jīng)過單面多級正弦磁化的磁膜、以及嵌在印刷電路板上的霍爾傳感器構(gòu)成。
經(jīng)單面多級正弦磁化后的磁體,又被稱作Halbach陣列,它的特點是在削弱一側(cè)磁場的同時,能極大地增強另一側(cè)磁場。
論文一作閆友璨發(fā)現(xiàn),這種陣列還有一種特殊性質(zhì),使得磁膜能互不干擾地測量正壓力和切向力,使得受力反饋更精確。
這種技術(shù),多被用于磁懸浮列車、粒子加速器、電磁炮等領(lǐng)域(冰箱貼也是類似的原理)。
當(dāng)外力施加在磁膜上時,霍爾傳感器將測量到由磁膜變形所引起的磁場變化,進而測量出施加外力的大小和方向。
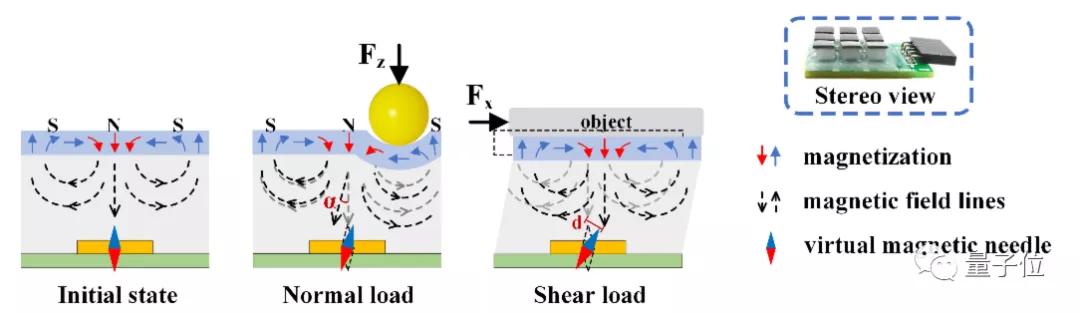
當(dāng)然,磁膜和霍爾傳感器之間,可以填充不同厚度和彈性的硅膠,來調(diào)節(jié)傳感器的靈敏度和量程。
這就完了?
當(dāng)然不,這種磁性皮膚,還用到了深度學(xué)習(xí)的算法,來更加準(zhǔn)確地定位外界刺激。
而且,與人類皮膚一樣,這種定位的精度可以超越傳感器自身的物理分辨率(兩個傳感單元之間的距離),即達到所謂的超分辨率。
磁性皮膚會先通過霍爾傳感器,大致分析出小球的施力位置在S5領(lǐng)域的右上角。
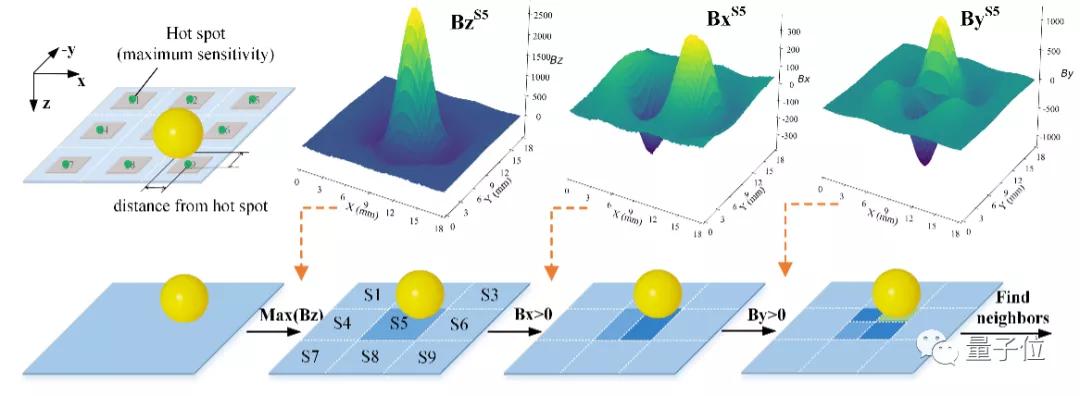
然后,再通過神經(jīng)網(wǎng)絡(luò)進行定量計算,將小球的接觸位置定位到S5右上角的坐標(biāo)(X,Y)處。

這種方法確認的定位精度,可以達到0.1毫米,分辨率為6毫米傳感單元間距的60倍。
做出來的磁性皮膚,效果如何呢?
定位精度堪比人類皮膚
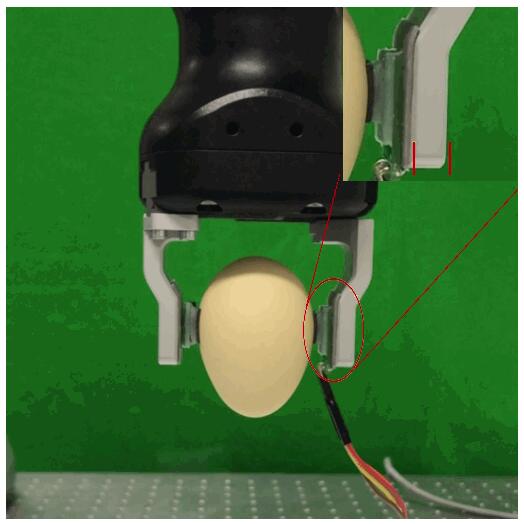
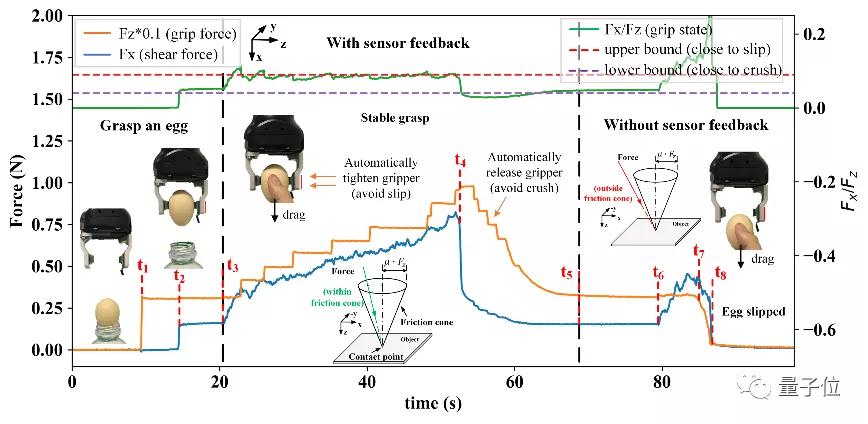
這個觸覺皮膚,不僅能實時反饋受力情況、自適應(yīng)抓取易碎物體,還能根據(jù)受力變化和定位精度,及時調(diào)整力的大小和方向。
例如,在夾取雞蛋的時候,如果遇到人類外力扯拽,機械手則會自動增大夾持力;而如果松手的話,機械手也會逐漸松開夾爪,避免雞蛋被夾碎。
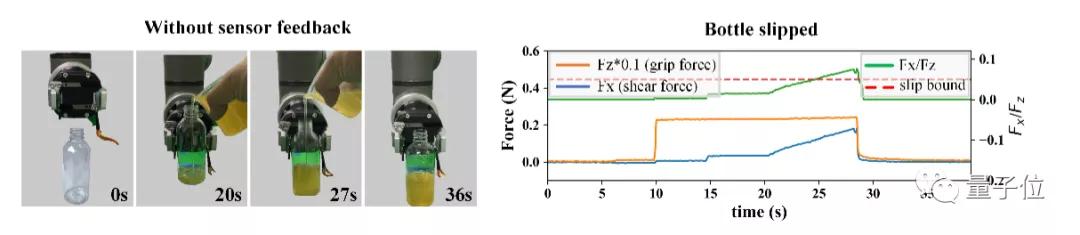
這種根據(jù)力反饋,來改變施力大小的實驗,在注水實驗中體現(xiàn)得更加明顯。
如果有了力反饋,夾爪在夾住瓶子的時候,就能根據(jù)瓶子注水的重量來改變用力大小,使得水瓶不至于滑落。
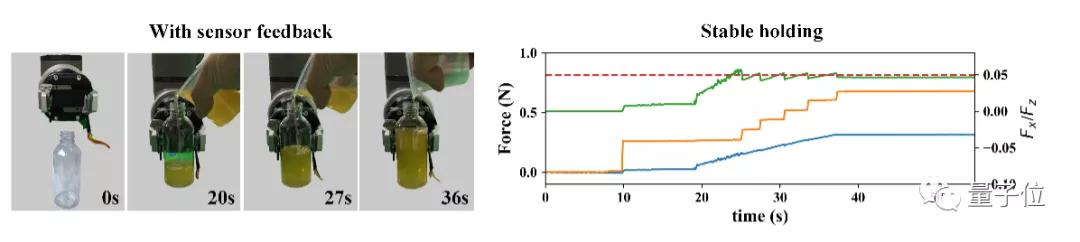
但如果關(guān)閉這種能反饋力度的觸覺功能,瓶子注水到一定程度,就從夾爪中滑落了。
不僅受力大小、方向的反饋非常精準(zhǔn),這款觸覺皮膚對外界刺激的定位,也非常精確。
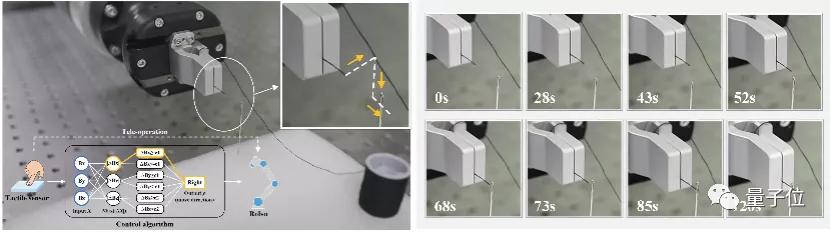
例如,通過遠程按壓觸覺皮膚,就可以遙控機械夾爪,輕輕松松將發(fā)絲細度的針線穿過針眼。
據(jù)論文作者表示,他們利用深度學(xué)習(xí),將超分辨率提升到了60倍,堪比人類皮膚約40倍的超分辨率。
作者表示,這款皮膚極大地減少了機器人皮膚中的傳感單元和布線,提升了智能皮膚的易用性。
或許,將來用上這款皮膚的智能機器人,也能擁有和我們一樣的觸覺了~
作者介紹
論文一作閆友璨,是香港城市大學(xué)的博士生,研究方向為機械與生物醫(yī)學(xué)工程。
這項工作,由來自香港城市大學(xué)生物醫(yī)學(xué)工程系的申亞京教授課題組、和香港大學(xué)計算機系的潘佳教授課題組共同完成。
其中,申亞京、潘佳為論文的共同通訊作者。
團隊的其他成員,則分別來自香港城市大學(xué)、CMU和南方科技大學(xué)。
論文地址:
https://robotics.sciencemag.org/content/6/51/eabc8801
參考鏈接:
https://scholar.google.com/citations?user=eY8D8JYAAAAJ&hl=en