













「土行孫」機器人登上Science子刊封面,用氣流在地下穿梭自如
本文經AI新媒體量子位(公眾號ID:QbitAI)授權轉載,轉載請聯系出處。
你能想到這個看上去略顯呆萌的“異物”,其實是個能挖洞的軟體機器人嗎?
怎么讓我想到了大白?
不僅是長相,連構造上都有點像。
這個挖洞機器人和大白一樣也是充氣的。
而且在能力上也像大白一樣強悍,在沒有任何挖掘工具的情況下都能靈活遁地。
比如,短短幾秒鐘就能鉆到沙土里。
深入“地下”也是so easy,速度還非常快。
而且可以像土行孫一樣潛在地下、穿梭自如。
這就是最近登上Science子刊《Science Robotics》封面的軟體機器人,由加州大學圣巴巴拉分校和佐治亞理工學院的研究人員共同開發。
它能以每秒4.8米的速度在干燥沙土中打洞,還可以在沙里360度靈活轉向。
這也為研究機器人如何在地下工作打開了一個新思路。
目前,該團隊已經與NASA達成合作,為月球、土衛二提供挖掘技術。
氣流遁地術
所以,這個看上去“手無縛雞之力”的軟體機器人,是如何在地下工作的呢?
要知道,地下環境中的阻力可比空氣、海洋中的大多了。
這也是機器人尚未能在地下空間大展拳腳的主要原因之一。
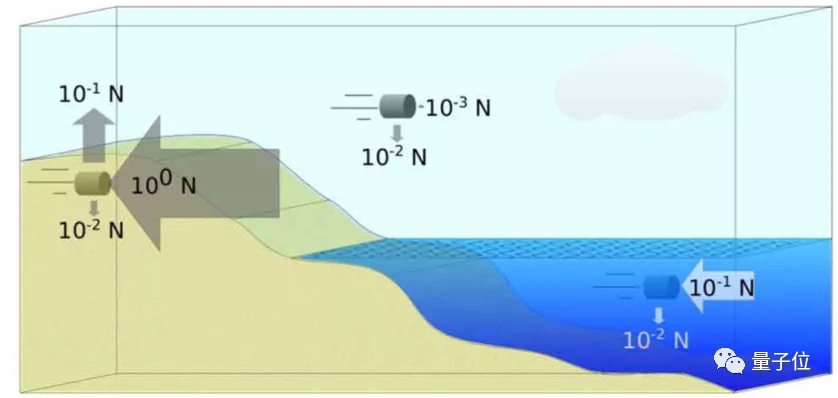
△不同介質中的阻力差別
為此,科學家們開始從地下生物身上找靈感。
首先被想到的就是植物的根莖。
它們能夠在地下縱深蜿蜒,主要靠的就是根莖尖端。
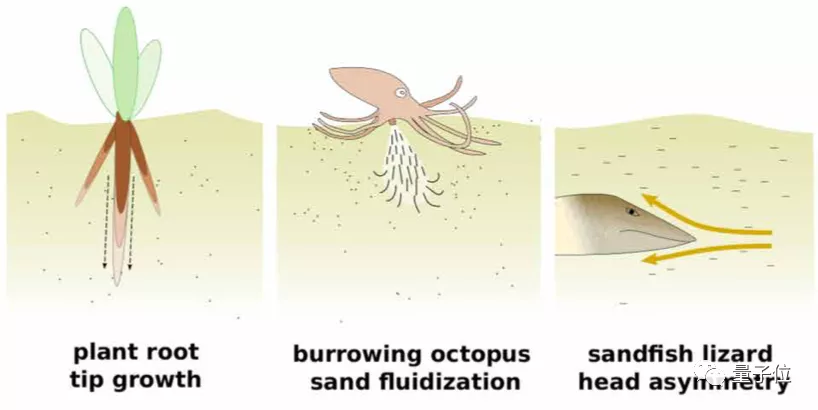
所以這款軟體機器人也有一個類似的機械尖端,可以用來開路;主體部分選用了較為光滑的軟管,用氣體來驅動機器人前進。
這樣可以提升機器人行動的速度和靈活性。
不過研究人員很快發現,當機器人在沙土中越走越遠時,它的身體也越來越長,產生的阻力就會隨之增加,最終它會因為克服不了阻力而動彈不得。
這時,他們又想到了章魚。
章魚是軟體動物,它想要潛入沙堆里時,會先噴出一股水流把沙子打散,然后用觸手把自己拉到沙子里。
所以,研究人員在機器人的尖端上又加了一個空氣噴流裝置。
讓它先把沙子打松散,以降低機器人通過時的阻力。
當機器人前進的阻力問題解決后,研究人員發現它的前進效果還是不夠好。
因為機器人總是在沙土里走著走著,就探出了頭。
這其實是因為在沙堆中的受力情況非常復雜,除了水平方向上的阻力,還有垂直方向產生的升力。
因此,機器人很難始終保持在一種平衡的狀態下。
那么如何讓它在地下穿梭自如呢?
這一次,研究人員想到了沙漠中的爬行動物。
比如砂魚蜥,就可以利用楔形的頭部來調整在土里的升力。
為此,研究人員加裝了一個垂直方向上的空氣噴流,以對抗機器人在潛行過程中會產生的升力。
從效果看,雖然機器人這樣走的非常狂野,但是它能夠保持在地下潛行了。
阻力大幅減小
為了能準確了解軟體機器人的運行情況,研究人員分別測試了軟體機器人3種情況下的表現:
- 只有尖端裝置
- 加裝有1個氣流裝置
- 加裝有2個氣流裝置
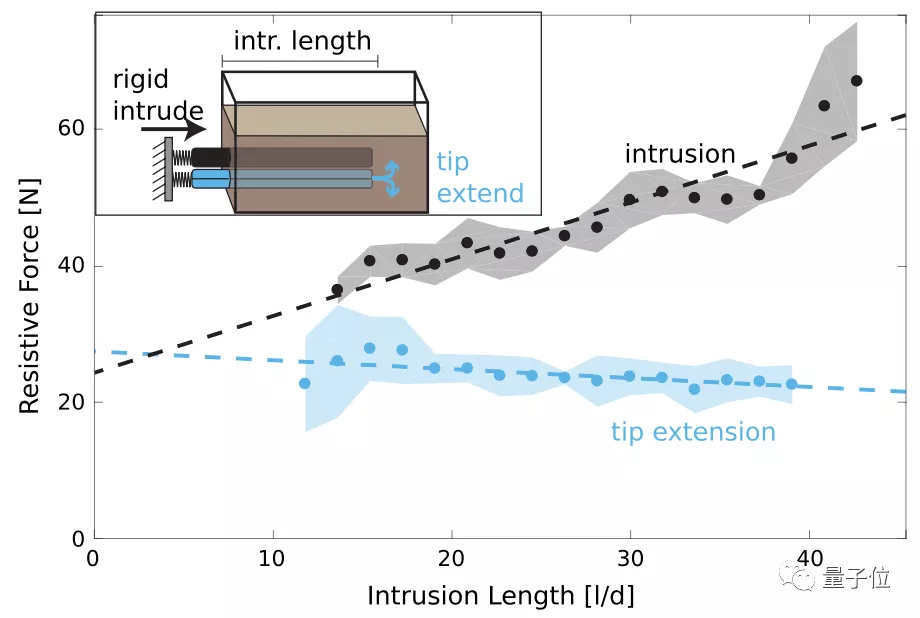
在僅使用機械尖端開路的情況下,軟體機器人在水平方向上前進的阻力,并不會隨著路線的增加而增長。
而不使用尖端開路的情況下,阻力和路線長度成正比。
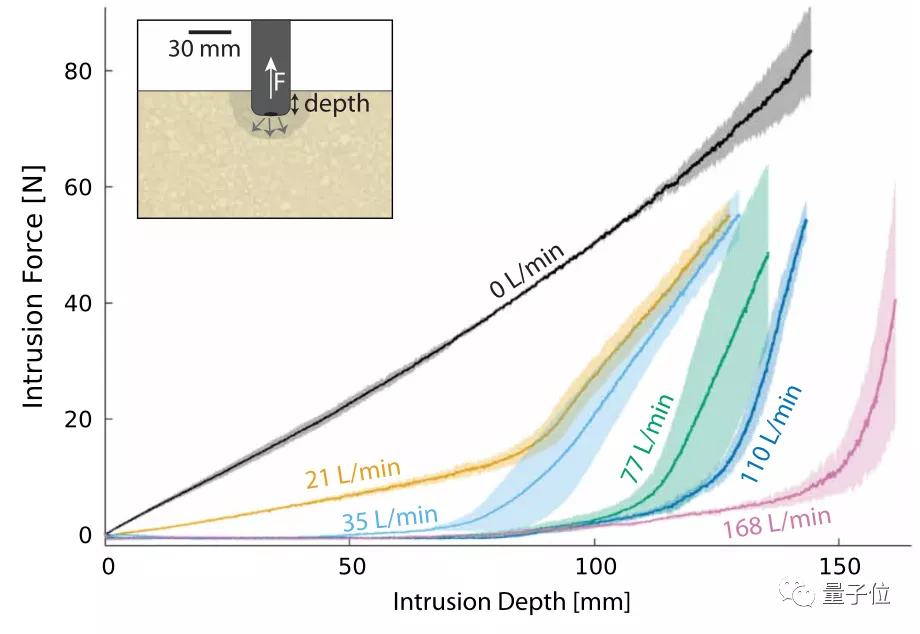
在軟體機器人安裝1個氣流裝置后:
垂直方向上,不使用空氣氣流驅動時,所產生的阻力和到達的深度成正比。
而隨著氣流速度的不斷增加,所產生的阻力會明顯減小,但是到達一定的深度后阻力還是會大幅上升。
研究人員測試了在不同深度的沙土中,軟體機器人水平運動時的阻力和升力情況。
同時,他們也改變了氣流裝置的角度,其中0度表示與水平方向平行,90度則表示與水平方向垂直。
數據顯示,在43mm和80mm的深度中,軟體機器人前行時的阻力都隨著氣流速度的增大而降低(下圖B和C)。
不過阻力大小和氣流角度就不是簡單的正負比關系了。
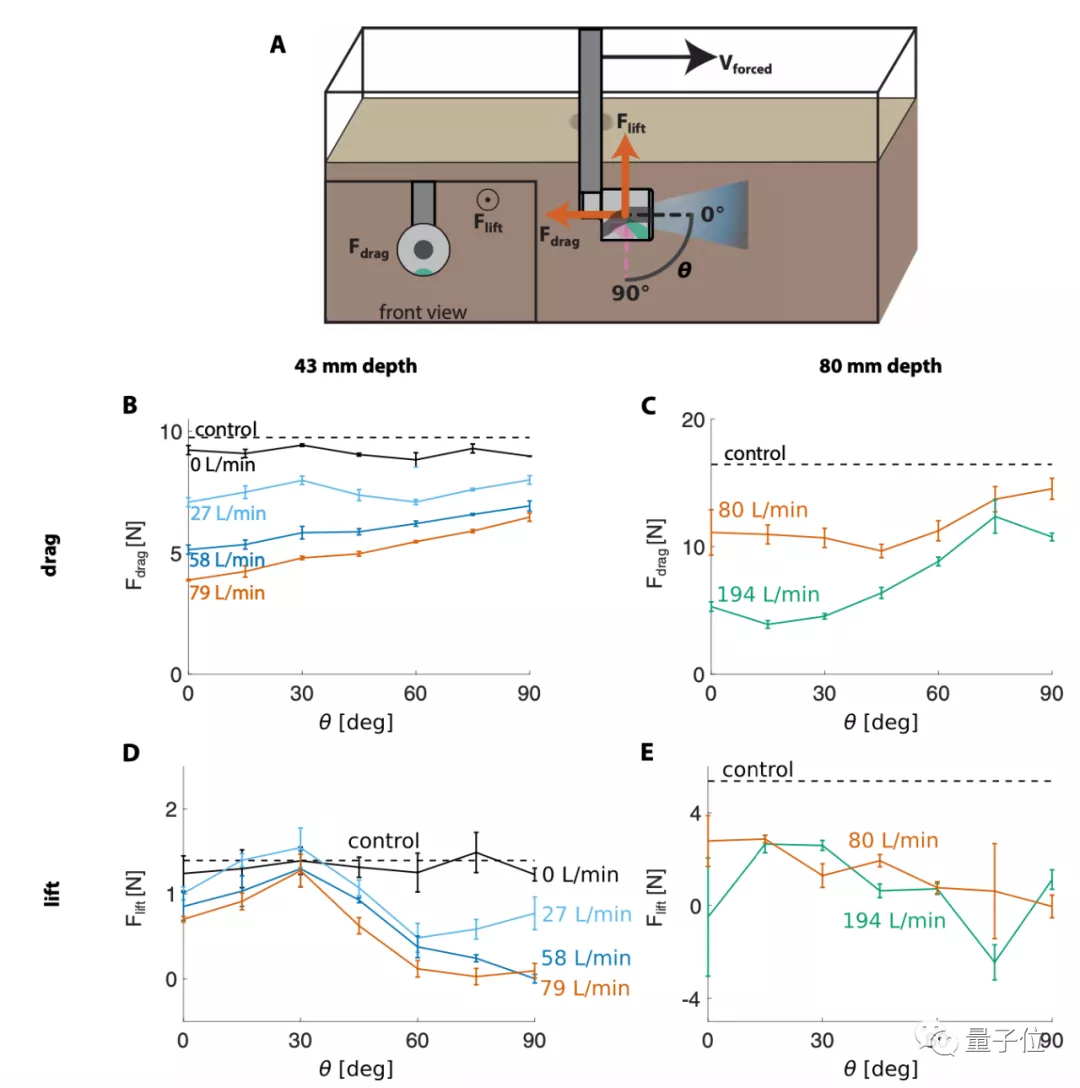
在升力方面,增加氣體流速會降低升力。
在40mm深度中(圖D),氣流夾角在0-30度之間,升力會隨著角度的增大而增大,在30度時達到最大值;
在30-60度之間,升力隨著角度的增大,大幅降低;
60-90度之間,升力基本保持不變。
在80mm深度中(圖E),也顯示了類似的趨勢,較低角度對減少升力的效果較差,隨著角度升高,能達到的效果會相對更好。
在1個動力氣流裝置的基礎上,加裝1個垂直方向的氣流裝置后:
軟體機器人的潛行效果和垂直方向上的氣流流速呈正比。
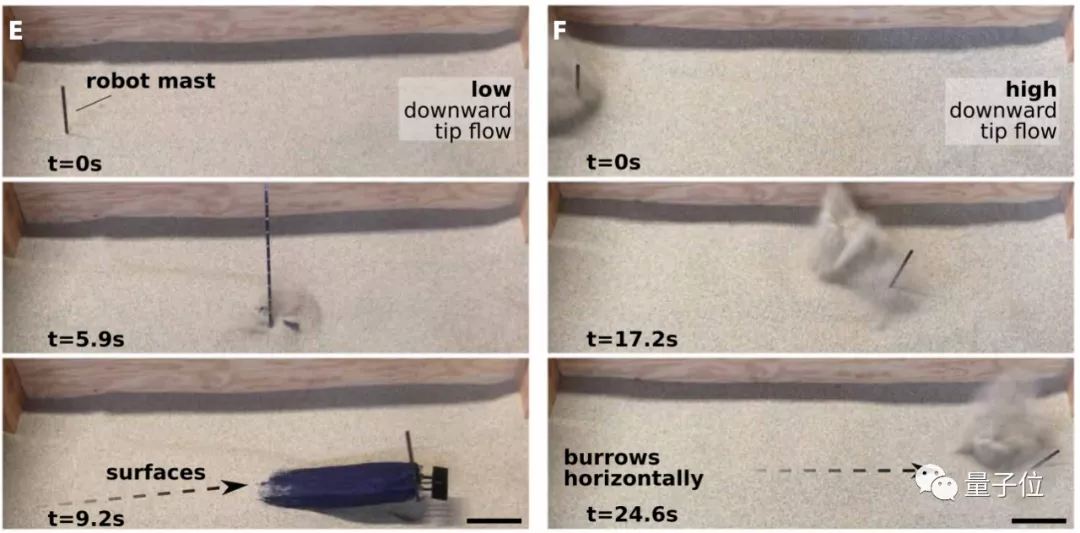
在低速下,軟體機器人潛行9.2s后就從沙土里鉆了出來;
在高速下,運行24.6s后仍舊能很好埋在沙里。
未來將走向太空
像這樣的小型軟體挖掘機器人,能夠應用的場景有很多,比如土壤采樣、地下勘探等。
而且這種機器人還能把自己固定在介質中,這對太空低重力環境中的探索非常有意義。
目前,該研究團隊已經與NASA開展了一個合作項目,為月球、土衛二開發提供挖掘技術。
通訊作者Elliot Hawkes表示:
我們相信這種挖洞方式有可能為機器人在太空應用開辟新的途徑。
Elliot Hawkes是加州大學圣巴巴拉分校機械工程學的一位助理教授,主要研究方向為動力系統和機器人控制。
























