用算法代替生物大腦,90后博士造出活的微型機器人登Science子刊
本文經AI新媒體量子位(公眾號ID:QbitAI)授權轉載,轉載請聯系出處。
一只蟲仿佛開了上帝視角,毫不猶豫地一次性穿過迷宮爬到終點:
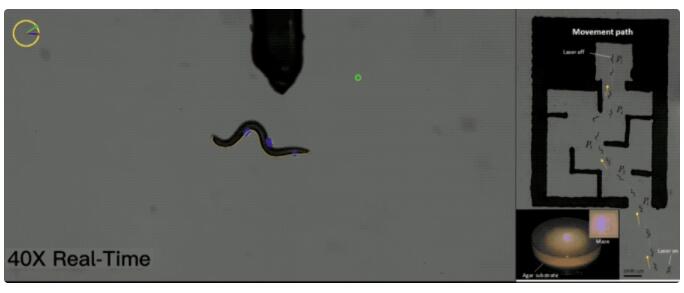
這條長度約1毫米,寬度80微米的蟲,還是在麻醉狀態,神經系統無法向肌肉傳達運動指令。
而控制它運動的,是視覺反饋導航算法。
它成了一條賽博蟲,一個活著的微型機器人。
微米級機器人在醫療領域有很高的應用價值,比如可以在人體內自主行動,把藥物精準地送到能發揮藥效的地方,還可以輔助精子移動幫助人工受孕。
這項把科幻場景帶到現實的研究,來自加拿大麥吉爾大學的90后博士董先科,相關論文刊登在Science子刊Science Robotics上。

不過,為什么不是從頭造一個機器人,而用蟲子代替呢?
因為微型機器人在技術上還面臨著幾大難題:
- 工藝上,微米尺度下的機器人如何制造、裝配,又該如何供能?
- 控制上,如何精密控制微型機器人的運動,又該如何測量?
- 原理上,微米環境下物理定律的尺度都縮小了,摩擦力與粘滯力的作用要比重力大上幾個數量級,如何讓機器人高效運動?
董先科腦洞大開,能不能借用一下現成的生物身體?
自然進化出來的生物已經適應了微米環境的運動方式,還會自己吃飯喝水供能,只要想辦法進行控制,問題就都解決了。
于是他盯上了線蟲。
被研究得明明白白的蟲
研究選用的是秀麗隱桿線蟲,這種線蟲已經是各類科學研究的常客。
因為它容易繁殖,而且全身透明,觀察起來很是方便:
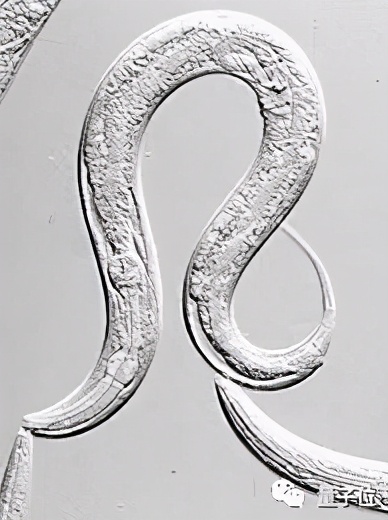
它還有一個特點是結構簡單,成蟲只有大約1000多個體細胞。
其中神經細胞有302個,它的神經系統全部的連接已被科學家畫出圖譜,還能實時成像。
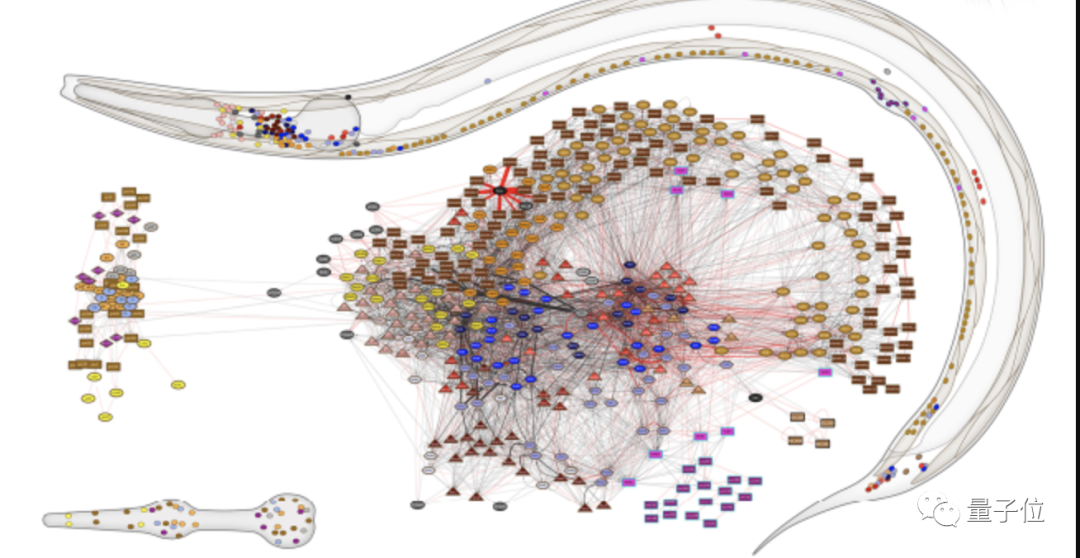
可以說是被研究得明明白白的了。
現在微型機器人身體已經找到了,接下來要解決的是如何控制它行動。
用算法取代大腦
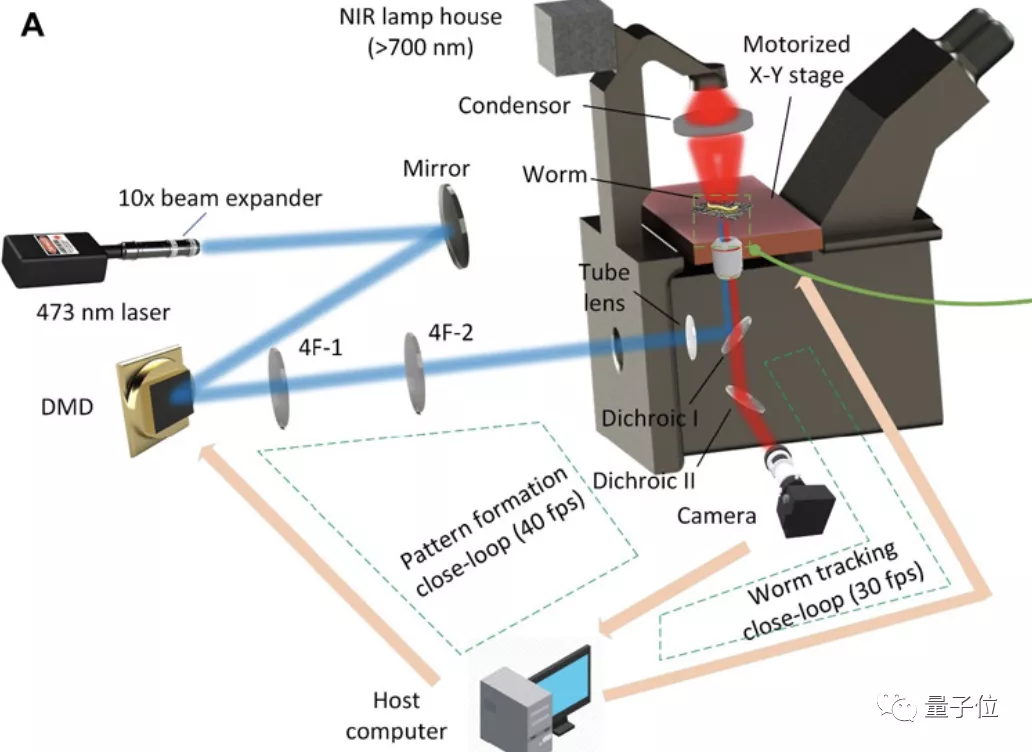
刺激線蟲肌肉運動的是光信號。
用波長473納米的藍色激光照射肌肉細胞,可以刺激細胞上ChR2通道打開,讓鈣離子進入刺激肌肉的收縮,從而控制線蟲肌肉的運動。
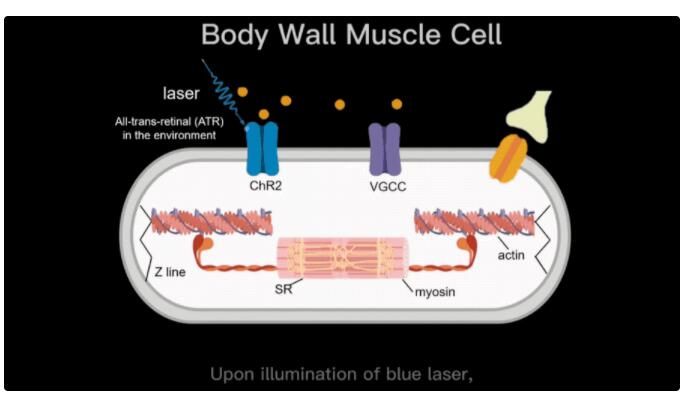
這項技術叫做光遺傳學,是一項整合了光學、軟件控制、基因操作技術、電生理等多學科交叉的生物工程技術。
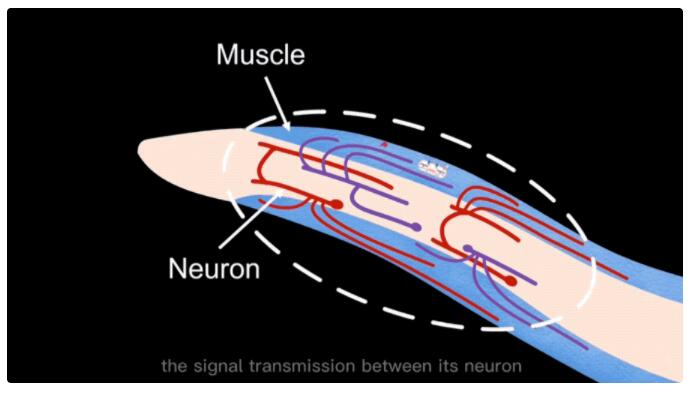
首先用化學方法阻斷線蟲的運動神經元與肌肉細胞的信息傳遞。
然后,通過機器視覺算法實時分析線蟲的姿態和周圍的環境。
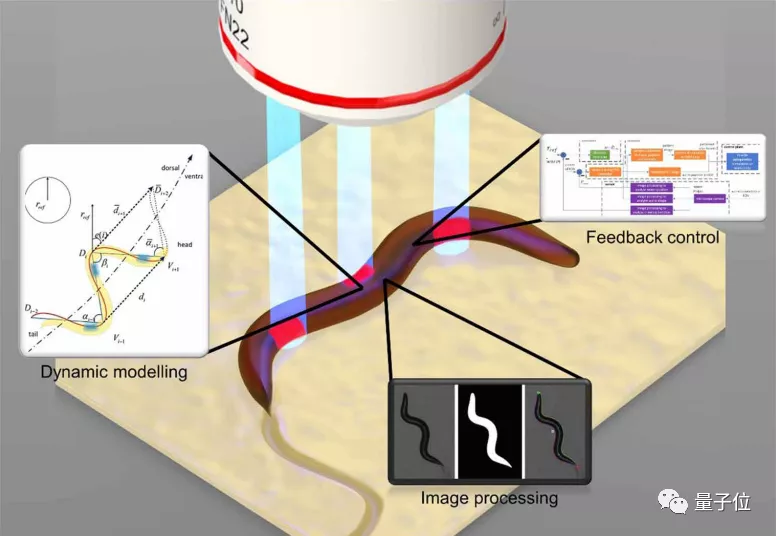
用微米級激光束精準照射線蟲的不同部位,來控制移動方向,實現了“用算法取代大腦”。
完整的實驗裝置示意圖是這樣的:
一個開創性思路
這項研究除了開辟活體生物與機器人結合的新思路以外,對其他相關領域也很有啟發。
對于傳統機器人,微米環境下的運動與日常宏觀運動有很大差別,往往運動速度和效率不高。
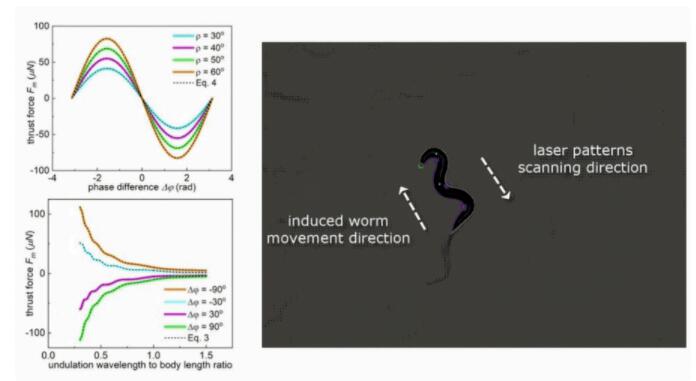
通過精確控制線蟲運動結合肌肉活性的熒光成像,可以幫助微米尺度下蛇形運動的動力學研究,指導新型機器人的設計和控制。
對于醫療,用微米激光束精密操控肌肉細胞活性的實驗,對癱瘓疾病的治療也有啟示意義。
研究中開發的分析線蟲運動的算法代碼還發在了GitHub上開源。
本文第一作者董先科,于2012年在哈爾濱工業大學航天學院自動化專業完成本科學習。
2014-2019年在加拿大麥吉爾大學機械工程系獲得博士學位,主攻機器視覺,微機器人,以及機器人精密操作研究方向。
2017-2019年在加拿大多倫多大學機械與工業化學院學習訪問,完成博士課題。
2019年至今在加拿大多倫多一家科技公司擔任算法研發工程師,負責嵌入式高幀率目光跟蹤系統的算法開發,以及在醫療AR和輔助駕駛場景的應用。
他的研究興趣包括了圖像處理與機器視覺,機器學習與深度學習,微機器人和機器人控制等方向。
近年在Science Robotics, IEEE T-MECH, IEEE T-ASE, IEEE T-BME, IEEE T-NBS, ICRA等權威期刊和會議發表學術論文20余篇,曾以第一作者身份獲得機器人領域頂級學術會議ICRA2015的最佳會議論文提名獎和最佳自動化論文提名獎。
通過這項研究,他對機器人有了新的感悟:
生物本身即最完美的機器人。
論文地址:
https://robotics.sciencemag.org/content/6/55/eabe3950/tab-figures-data
相關代碼:
https://github.com/BionDong/worm-locomotion-feature-analysis