自動(dòng)駕駛汽車急轉(zhuǎn)彎時(shí)車道線檢測的3種技術(shù)
自動(dòng)駕駛汽車需要感知不同顏色以及在不同的照明條件下的車道線,以便準(zhǔn)確地檢測車道。除了速度和汽車動(dòng)力學(xué)特性外,還應(yīng)該知道車道曲率,以確定停留在車道上所需的轉(zhuǎn)向角。
三種技術(shù):
1.色彩空間
2.索貝爾算子
3.曲率半徑
色彩空間
RGB色彩空間非常適合帶有白色通道的圖像。它在其他彩色車道上有局限性。因此我們可以探索其他顏色空間,例如HSV(色相,飽和度,值)和HLS(色相,亮度,飽和度)等。
色相表示與亮度變化無關(guān)的顏色。亮度和值是測量顏色的明暗度的不同方法。飽和度是色彩度的量度。帶有黃色車道線的圖像被分為RGB和HLS,如下所示。
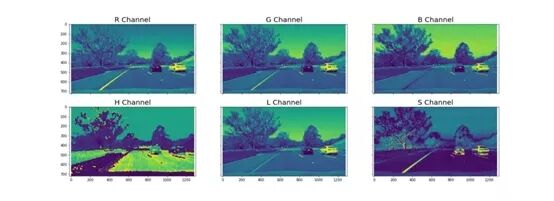
僅R,G和S通道顯示與黃色車道線相對(duì)應(yīng)的高像素強(qiáng)度。藍(lán)色通道的黃色像素強(qiáng)度為零。通過選擇最佳通道和該通道的正確顏色閾值,我們現(xiàn)在可以更準(zhǔn)確地識(shí)別黃色車道線,如下所示。

索貝爾算子
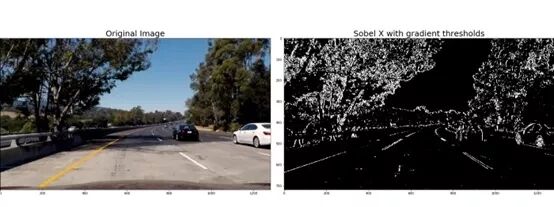
由于車道線是垂直的,因此我們可以以更智能的方式使用漸變來檢測車道的陡峭邊緣。將Sobel運(yùn)算符應(yīng)用于圖像是一種在x或y方向上獲取圖像導(dǎo)數(shù)的方法。
通過選擇x方向上的坡度(Sobel x運(yùn)算符)并調(diào)整該坡度的強(qiáng)度,我們現(xiàn)在可以找到車道的那些部分,這是S通道無法檢測到的(在前面的部分中),如下所示。
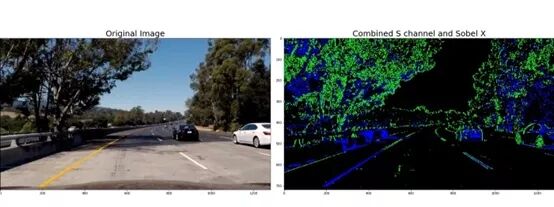
現(xiàn)在,我們可以結(jié)合以上每種技術(shù)(Sobel x和S通道)識(shí)別的像素,以在變化的照明條件下更準(zhǔn)確地找到黃色車道線,如下所示。
即使我們的算法現(xiàn)在可以檢測到不同顏色,在不同光照條件下的車道,但遇到突然的彎道時(shí),它仍然可能會(huì)失敗。
曲率半徑
車道曲率的知識(shí)對(duì)于汽車停留在車道上是必不可少的。透視變換改變了我們的視角,可以從不同的視角和角度觀看同一場景。鳥瞰,讓我們將多項(xiàng)式擬合到車道線。然后,我們從多項(xiàng)式中提取車道曲率。
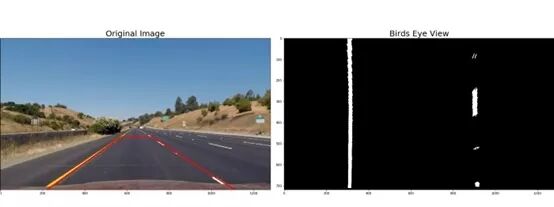
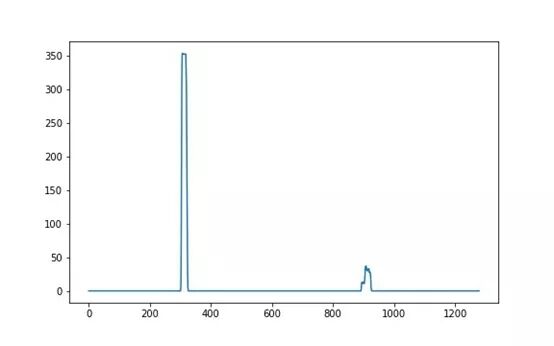
繪制直方圖并在上圖的左右兩邊找到峰值,可以得出左右車道的起始位置,如下所示。
滑動(dòng)窗
使用起始位置,并在圖像上應(yīng)用滑動(dòng)窗口技術(shù),我們能夠?qū)⒍囗?xiàng)式擬合到車道線,如下所示。

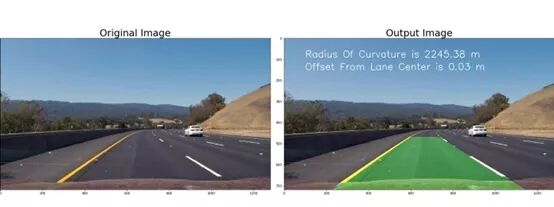
車道中心的曲率半徑和偏移
像素被轉(zhuǎn)換為米,并重新計(jì)算多項(xiàng)式擬合以確定以米為單位的曲率半徑,如下所示。
結(jié)論
連續(xù)框架的車道線位置相似。因此,要在下一幀中查找車道像素,我們可以在一定距離內(nèi)搜索先前檢測到的車道線位置。
上述技術(shù)的應(yīng)用使汽車能夠在變化的照明條件(明亮的光線和陰影區(qū)域)和陡峭的彎道上準(zhǔn)確識(shí)別不同顏色(黃色和白色)的車道,如下所示。