













敏捷如黃蜂!MIT華人助理教授造出「厘米級」類昆蟲機器人
在你面前飛來飛去的蚊子,你揮手趕走,它還會回來,一次又一次,讓你不勝其煩。
但你是否注意到蚊子在來來回回中表現出的驚人的飛行能力和適應力?
隨時出現的一陣「風」就可能把它們吹走,隨時可能撞上不明障礙物......
它們的環境充滿了不確定性,但正是這樣的生存環境讓它們變得無比敏捷,具有韌性。
那么無人機能否從中借鑒一二呢?
近日,麻省理工學院的助理教授Kevin Yufeng Chen就設計出了接近昆蟲敏捷度的機器人系統。
先來看視頻了解一下:
類昆蟲無人機
一般情況下,無人機需要在戶外、開闊的地方操作,因為它不夠敏捷,如果空間小,導航就會非常費力,另外,無人機也非常脆弱,一旦發生碰撞很可能就「墜毀」了。
而且,對于一些復雜、狹窄的環境,很多個頭大的無人機也無法施展拳腳。
考慮到目前無人機這些限制,如果能造出類昆蟲的無人機——個頭小巧又敏捷,撞上障礙物也不影響飛行,那么無人機的應用將大大增加。
個頭大的無人機通常由電動機驅動,但是電動機會因為縮小而失去效率。這對小型甚至微型的無人機來說就不可能了,只能找替代品。
目前,最主要的替代方案是采用壓電陶瓷材料制成的小型剛性驅動器。雖然壓電陶瓷已經在第一代微型無人機上成功應用,但它非常脆弱。
哈佛大學威斯研究所設計的史上最輕飛行機器人機器蜜蜂RoboBees
設計類昆蟲機器人,很重要的一個目的就是要讓它模仿昆蟲的韌性——能承受一定的碰撞,自然界覓食的大黃蜂遭受碰撞的概率大約每秒一次。
Chen找到了一種替代品——涂有碳納米管的薄橡膠圓筒制成的軟驅動器(如下圖所示),當電壓施加到碳納米管上時,它們產生靜電力,使橡膠圓筒擠壓拉長。
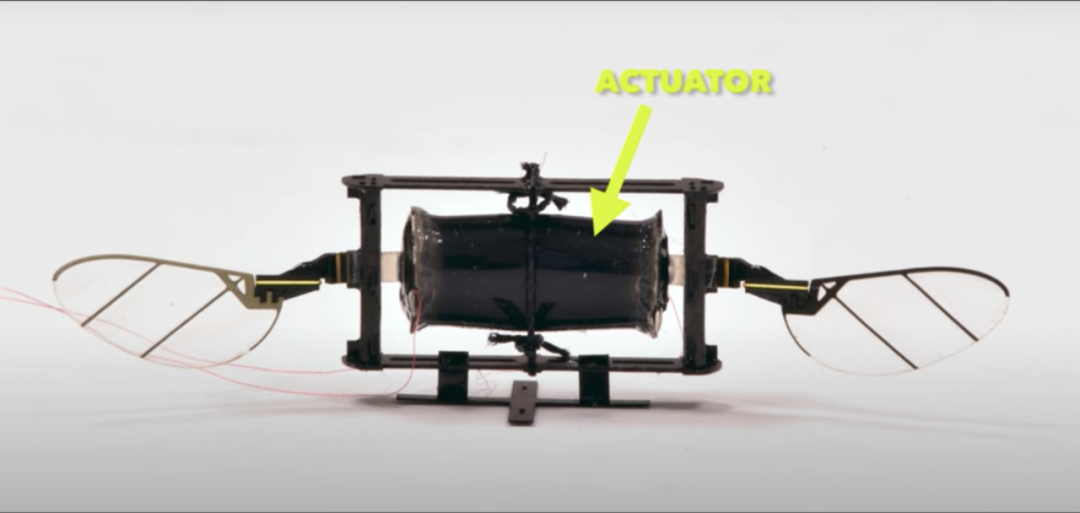
反復的伸長和收縮使機器人的翅膀快速振動。這種軟驅動器可以實現每秒500次拍動,這就賦予了機器人昆蟲般的彈性。
由于軟驅動器固有的柔順性,無人機就算受到撞擊,它也可以迅速反彈,飛行不會受到嚴重影響。
這一特性非常適合在混亂、動態的環境中飛行。
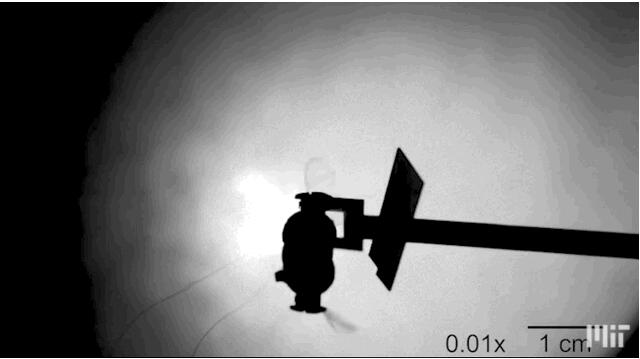
不僅韌性強,Chen的類昆蟲無人機還可以表演翻跟斗,0.16秒內完成翻轉動作。
Chen的類昆蟲機器人只有0.6克,和一只大黃蜂的重量相當。
外形看起來有點像一個帶翅膀的小盒式磁帶。

康奈爾大學的電子和計算機工程助理教授Farrell Helbling表示,「厘米級的機器人實現飛行總是一項令人印象深刻的壯舉」。
這些應用的一個關鍵步驟將是從有線電源解除無人機的網絡連接,而網絡連接是目前所需的驅動器提供高工作電壓。
「期待看到作者將如何降低運行電壓,在現實環境中實現無線飛行。」
這樣個頭小巧,行動敏捷,韌性也高的無人機可以應用在復雜機械的檢修(檢查渦輪機板的裂紋),農作物授粉,或者自然災害的搜救等環境中。
逆向工程解決生物學問題
同時,類昆蟲無人機可以為研究昆蟲飛行的生物學和物理學打開一扇窗戶,這也是研究人員長期探索的一個課題。Chen的工作通過一種逆向工程的方式來解決昆蟲飛行問題。
「如果你想研究昆蟲如何飛行,建立一個機器人模型是非常有指導意義的,你可以擾亂一些東西,看看機器人如何影響運動學或流體力量的變化。這將有助于你理解昆蟲是如何飛行的。」
這次研究的相關論文發表在IEEE Xplore,論文作者還包括哈佛大學的博士生Siyi Xu,麻省理工學院的博士生Zhijian Ren,以及香港城市大學的機器人專家Pakpong chirarattanon.

他一直從事昆蟲級機器人研究,曾登福布斯30歲以下精英榜
Kevin Yufeng Chen,2020年1月加入MIT電子工程與計算機科學系,任助理教授。
他本科在康奈爾大學獲得應用物理學學士學位,在哈佛大學先后獲得文理學碩士和工程科學博士學位,博士學習師從機器人專家Robert J. Wood教授,上文中提到的機器蜜蜂RoboBee項目就是Wood教授帶領完成。
Robert J. Wood教授
隨后Chen在哈佛大學做博士后研究,引領了高度敏捷、多功能和堅固的小型機器人的研發工作。
他的研究成果發表在包括《科學·機器人學》,《自然》和《自然通訊》等頂級期刊上。
他曾是2019年福布斯30位30歲以下精英榜(科學領域)一員,福布斯的介紹重點提及了他的類昆蟲機器人研究。

他研究了毫米級的生物力學,提煉其中基本的物理原理,然后將這些發現應用于微型機器人的新功能。
他還對開發新的軟驅動器以使微型機器人能夠實現敏捷和穩定的運動等研究感興趣。
另外,論文作者之一哈佛博士生Siyi Xu,目前主要研究軟機器人。
另一名作者是MIT博士生Zhijian Ren,據Google Scholar的介紹,Ren目前主要研究軟機器人、仿生機器人和控制理論。
還有香港城市大學的機器人專家、副教授Pakpong chirarattanon. 主要研究仿生機器人、微型飛行器、撲翼飛行等。























