翻滾跳躍、集群飛行,MIT新一代類昆蟲無人機還能承受人為撞擊
仿生鳥類和昆蟲一直是無人機研究領域的重要課題,也出現(xiàn)了各式各樣的飛行機器人,如斯坦福學者制造的帶羽毛翅膀的「機器鴿」等。MIT 助理教授、前哈佛大學微型機器人實驗室博士后 Kevin Yufeng Chen 一直致力于制造類昆蟲機器人,并對他們實驗室打造的史上最輕飛行機器人Robobee進行了改進。近日,他又發(fā)表研究介紹了兼具敏捷性和回彈性的新一代微型類昆蟲無人機,不僅可以在狹窄的空間中操作,還能承受得住人為的碰撞。
我們都知道,蚊子這種「惹人厭」的生物在飛行中具有極高的靈活性和復原能力。這些特性使得它們能夠在大風、堆滿障礙物以及其他不確定的空中環(huán)境中順利地導航。遺憾的是,這些特性很難植入到微型飛行機器人中。
近日,MIT 電子工程與計算機科學系(EECS)助理教授 Kevin Yufeng Chen 構建了一種接近昆蟲敏捷度的系統(tǒng),并開發(fā)了一個無可比擬敏捷型和回彈性的類昆蟲無人機(insect-sized drone)。
這款空中機器人由一種新型的軟致動器賦能,使得它們能夠經得起實際飛行中的物理碰撞等。Chen 希望未來這款無人機可以為農作物授粉或者在狹小空間中執(zhí)行機械監(jiān)理任務,從而為人類提供幫助。相關研究發(fā)表在了 IEEE Transactions on Robotics 期刊上。
論文鏈接:https://ieeexplore.ieee.org/document/9357346/authors#authors
這款昆蟲大小的無人機具有哪些特性呢?
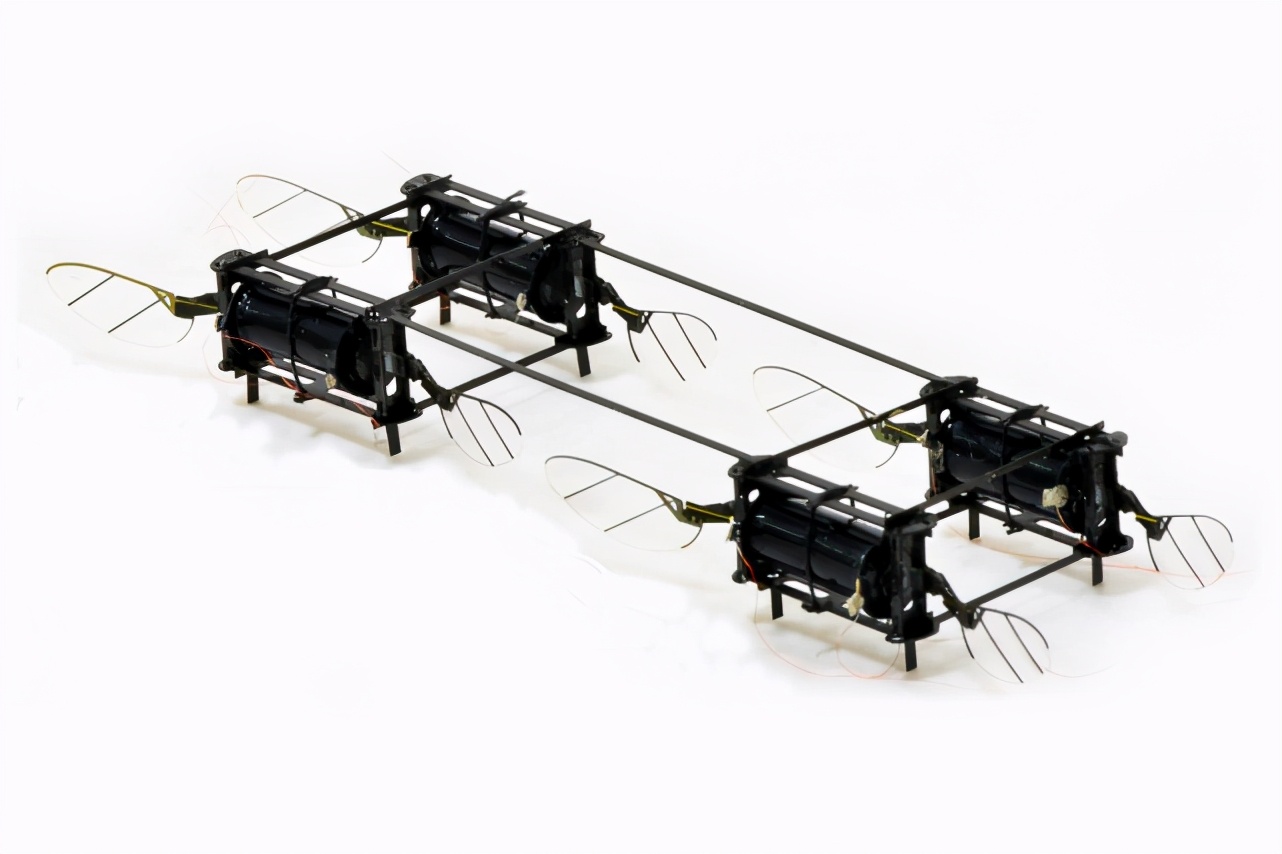
首先,無人機的致動器由涂有碳納米管的薄橡膠圓筒制成,通電時碳納米管產生靜電力,擠壓和拉長橡膠圓筒。反復的伸縮使得無人機的翅膀快速煽動,從而使其順利升空飛行。
其次抗得住人為的碰撞:

最后還可以空中翻滾跳躍,再起飛:

眾多網友對這款類昆蟲無人機的評價甚高,認為其將變革整個無人機行業(yè)!
MIT 類昆蟲無人機詳解
通常情況下,無人機需要廣闊的空間,因為它們既不能靈活地在狹窄空間中導航,也沒有足夠的魯棒性在擁擠的環(huán)境中承受碰撞。現(xiàn)今的無人機體積都很大,無人機大多數(shù)應用都涉及到戶外飛行。但問題是:你能創(chuàng)造出昆蟲大小的無人機,并使其在非常復雜、雜亂的空間里飛行嗎?
Chen 表示,制造小型空中無人機的挑戰(zhàn)是巨大的。小型無人機的結構與大型無人機完全不同。大型無人機通常由電機提供動力,但當你縮小它們時,電機就會失去效率。因此,對于類昆蟲無人機,你需要尋找替代品。
MIT 助理教授 Kevin Yufeng Chen。
迄今為止,主要的替代方案是采用由壓電陶瓷材料制成的小型剛性執(zhí)行器。壓電陶瓷使第一代微型無人機得以飛行,但它們非常脆弱。Chen 設計了一種更具彈性的微型無人機,采用軟致動器,而不是比較硬的、易碎的致動器。
軟致動器由涂有碳納米管的薄橡膠圓筒制成。當對碳納米管施加電壓時,它們產生一種靜電力,擠壓并拉長橡膠圓筒。反復的拉伸和收縮使無人機的翅膀快速的煽動。
Chen 采用的致動器可以每秒拍打近 500 次,賦予無人機類似昆蟲般的彈性。你可以在它飛行時去擊打,但它會自行恢復。除此以外,它還可以做空中翻筋斗等具有攻擊性的動作。它的重量只有 0.6 克,大約是一只大黃蜂的重量。這款無人機的外形看起來像帶有翅膀的小卡帶,不過 Chen 正在研制一種外形像蜻蜓的新型原型機。
康奈爾大學電子和計算機工程系助理教授 Farrell Helbling 表示:「用一個厘米級的機器人實現(xiàn)飛行是了不起的。由于軟致動器固有的柔順性,即使撞上障礙物,也能保證無人機的安全,而不會對飛行產生很大的抑制作用。這一特性非常適合在混亂的動態(tài)環(huán)境中飛行,對現(xiàn)實世界的很多應用程序都非常有用。」
Helbling 補充道,實現(xiàn)這些應用的一個關鍵步驟將是從有線電源上解除機器人的束縛,這是目前致動器的高工作電壓所需要的。
就其影響而言,發(fā)明類昆蟲無人機為研究昆蟲飛行的生物學和物理學提供一個窗口。Chen 通過一種逆向工程解決了這些問題,并希望未來自己的無人機可以用于工業(yè)和農業(yè)。