













機器人頂會RSS各獎項出爐,CMU華人博士生摘得最佳論文
近日,機器人領域知名會議 RSS(Robotics: Science and System)公布了今年的最佳論文、最佳學生論文、杰出審稿人、時間檢驗獎等重要獎項。其中,最佳論文獎和杰出審稿人獎都由華人學者摘得。
與其他領域動輒接收上千篇論文的頂會不同,RSS 算是一個小眾的機器人會議,每年接收的論文只有幾十篇,錄取難度比較高。從方向來看,RSS 接收的論文更偏重算法和數學,今年的建議投稿方向包括機制設計、機器人學習、控制與動力學、人機交互、機器感知、多機器人系統和醫療保健機器人等。偏應用的機器人文章可能更適合投 ICRA 和 IROS。
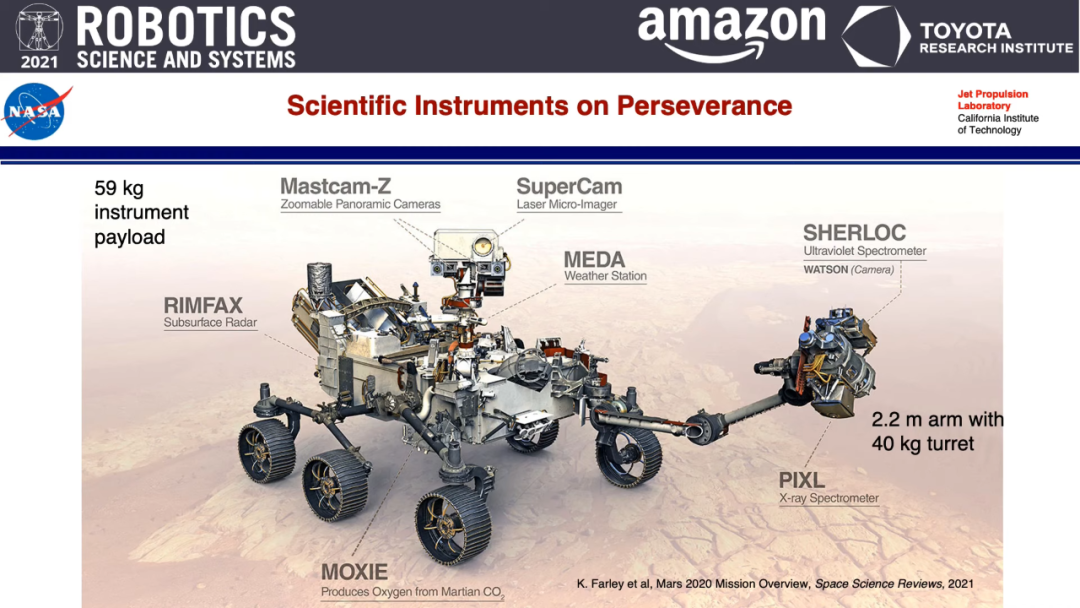
受疫情影響,今年的 RSS 于 7 月 12 日至 16 日在線上舉辦,分為 Keynote、Workshop、Tutorial 等多個環節。在 Keynote 環節,美國宇航局噴氣推進實驗室高級研究科學家兼計算機視覺小組主管 Larry Matthies 介紹了「毅力號」火星車在登陸火星之后取得的進展。在 Workshop、Tutorial 等環節,來自多個研究機構的學者探討了機器人視覺學習與推理、GPU 加速的機器人學習與控制等話題。相關視頻可以在 Youtube 等平臺找到。
如今,備受關注的最佳論文等獎項也已出爐,以下是詳細的獲獎信息。
最佳論文獎
論文:TARE: A Hierarchical Framework for Efficiently Exploring Complex 3D Environments
- 論文主頁:https://roboticsconference.org/program/papers/018/
- 作者:Chao Cao、Hongbiao Zhu、Howie Choset、Ji Zhang
- 機構:CMU
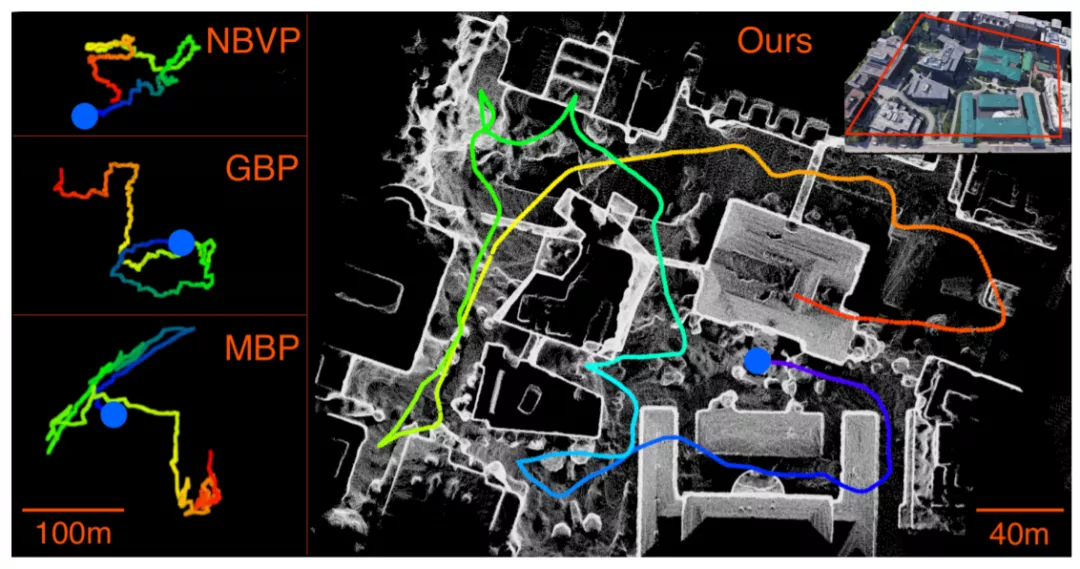
讓機器人在復雜的 3D 空間中自主探索是一個頗具挑戰性的問題,因為它需要同時完成兩項任務:1)在線更新環境表示,以跟蹤已探索的區域;2)搜索連續可遍歷路徑的表示,以引導機器人探索未知區域。
在這篇論文中,研究者提出了一種在復雜 3D 環境中自主探索的方法,其探索速度比當前的 SOTA 方法還要快。具體來說,該方法使用了一種分層框架:第一層在局部規劃范圍內保持環境的高分辨率表示并計算詳細路徑;第二層在全局范圍內保持環境的低分辨率表示并計算粗略路徑。
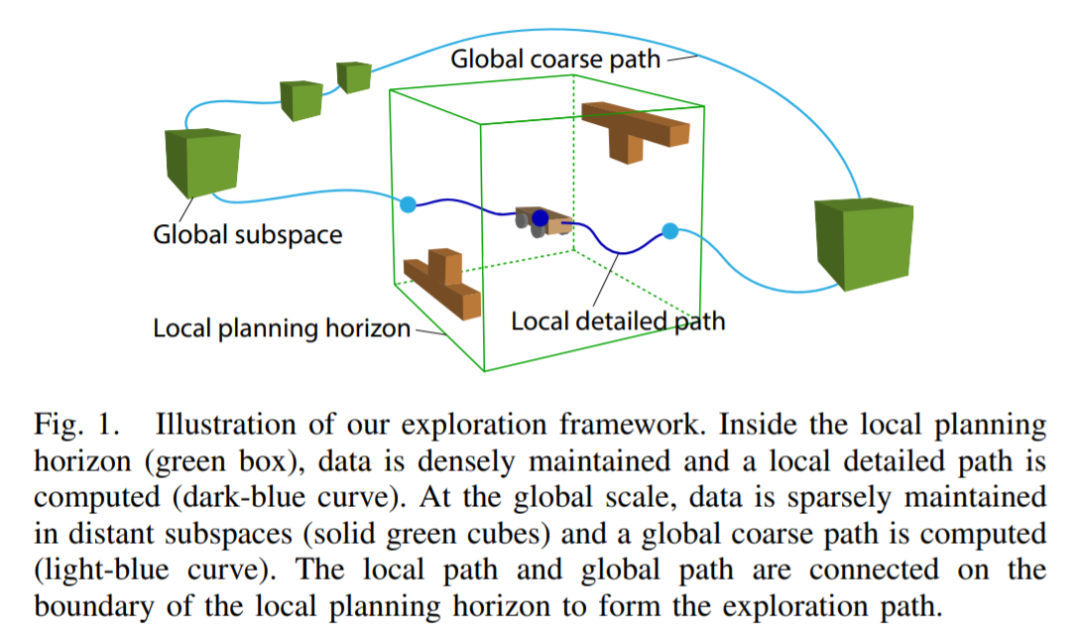
該架構表明,在機器人附近進行詳細的數據處理是最高效的,犧牲遠離機器人區域的細節計算可以提高計算速度。該方法根據路徑的長度優化整個探索路徑。此外,局部區域的路徑在運動動力學上是可行的,機器人可以遵循該路徑快速前進。
在實驗中,該系統通過地面和空中機器人,自主探索了高維、復雜的室內外環境。與 SOTA 方法相比,該方法的探索效率(每秒平均探索量)提高了 80%,但消耗的算力還不到 SOTA 方法的 50%。
該論文的第一作者 Chao Cao 本科畢業于香港大學,目前在卡內基梅隆大學讀博,研究興趣主要集中在機器人導航和運動規劃。除了日常科研之外,他還在領導 DARPA 地下城市挑戰賽 Team Explorer 競賽的規劃工作。
最佳論文入圍
除了最佳論文獎外,本屆 RSS 會議還有三篇論文入圍了該獎項,分別如下:
論文 1:Optimal Pose and Shape Estimation for Category-level 3D Object Perception
- 論文主頁:https://roboticsconference.org/program/papers/025/
- 作者:Jingnan Shi、Heng Yang、Luca Carlone
- 機構:MIT
本文第一個貢獻是為姿勢和形狀估計提供了首個可證明的最佳求解器;第二個貢獻是在求解器中添加一個異常拒絕層(outlier rejection layer),從而使求解器對大量錯誤檢測具有魯棒性;第三個貢獻是廣泛的實驗評估,該研究除了在模擬數據集和 PASCAL3D + 數據集上進行消融研究外,還將求解器與深度學習關鍵點檢測器相結合,并表明所得到的方法比 ApolloScape 駕駛數據集中 SOTA 車輛姿態估計方法有所改進。
論文 2:Moving sidewinding forward: optimizing contact patterns for limbless robots via geometric mechanics
- 論文主頁:https://roboticsconference.org/program/papers/031/
- 作者:Baxi Chong、Tianyu Wang、Bo Lin、Shengkai Li、Howie Choset、Grigoriy Blekherman、Daniel Goldman
- 機構:佐治亞理工學院、CMU
本文中研究者使用幾何運動規劃方案,并開發了一個框架來設計、優化和分析接觸模式,以在期望的方向上產生有效的運動。該研究提出的框架提供了接觸模式設計的物理見解,并借鑒了經驗準則。應用該框架,研究者不僅可以通過接觸模式來控制 12-link 四肢機器人的運動方向,而且可以為電機較少的機器人(如 6-link 機器人)設計有效的側繞步態。實驗表明,該方法通過物理實驗測試獲得了很好的一致性。
論文 3:Toward Certifiable Motion Planning for Medical Steerable Needles
- 論文主頁:https://roboticsconference.org/program/papers/081/
- 作者:Mengyu Fu、Oren Salzman、Ron Alterovitz
- 機構:北卡羅來納大學教堂山分校、以色列理工學院
本文提出了第一個用于可操縱引導針的運動規劃器。它能夠保證在臨床上適當的假設下,在有限的時間內為指定的目標計算出準確的避障運動計劃,或者通知用戶不存在這樣的計劃 。該研究基于一種新的多分辨率規劃方法,提出了一種高效、分辨率完備的可操縱針運動規劃方法。與 SOTA 可操縱針運動規劃器相比,研究表明,新的分辨率完整運動規劃器計算計劃更快、成功率更高。
最佳學生論文
本屆 RSS 會議的最佳學生論文有兩篇,分別由博世人工智能中心、丹麥技術大學等機構和南加州大學、英偉達等機構的研究者獲得。
論文 1:Learning Riemannian Manifolds for Geodesic Motion Skills
- 論文主頁:https://roboticsconference.org/program/papers/082/
- 作者:Hadi Beik-mohammadi、Soren Hauberg、Georgios Arvanitidis、Gerhard Neumann、Leonel Rozo
- 機構:博世人工智能中心、丹麥技術大學、圖賓根大學、卡爾斯魯厄理工學院
為了與人類一起工作并在非結構化環境中執行任務,機器人必須學習新的運動技能并盡快適應未見過的環境。這需要學習模型來捕捉相關的運動模式,同時提供足夠的靈活性以使已編碼技能適應新的要求,例如動態避障。
該研究引入了黎曼流形來解決這個問題,并提出從人類示范中學習黎曼流形。在人類身上,測地線(geodesics)是自然而然的運動技能。該研究通過在機器人末端執行器的位置和方向空間上的變分自編碼器(VAE)來實現這一點。測地線運動技能可以讓機器人規劃數據流形上任意點之間的運動。這種技能還提供了一種簡單的避障方法,即通過在線方式重新定義環境度量來避開障礙。
此外,測地線利用多解設置產生的流形來設計以前沒有演示過的運動。該研究使用 7 個自由度的機器人機械手來測試學習框架。在此框架下,機器人能夠很好地學習和再現具有復雜運動模式的真實技能、避開以前沒見過的障礙,并在多解設置中生成新的運動。
論文 2:DiSECt: A Differentiable Simulation Engine for Autonomous Robotic Cutting
- 論文主頁:https://roboticsconference.org/program/papers/067/
- 作者:Eric Heiden、Miles Macklin、Yashraj S Narang、Dieter Fox、Animesh Garg、Fabio Ramos
- 機構:南加州大學、多倫多大學、悉尼大學
在這篇論文中,研究者展示了首個用于切割軟材料的可微模擬器。該模擬器通過一個基于有向距離場( SDF)的連續接觸模型,以及一個在切割面兩側插入彈簧并允許它們減弱至零剛度的連續損傷模型來增強有限元法(FEM),從而形成裂紋。
研究者通過各種實驗對該模擬器的性能進行了評估,結果如下:
- 首先可以對該模擬器進行校準以匹配來自 SOTA 商業求解器和真實世界切割數據集的合力和形變場,并在切割速度和目標實例上具有普遍性;
- 其次可以利用該模擬器的可微性來高效地執行貝葉斯推斷,并在無導數方法的一部分時間內估計數百個參數的后驗;
- 最后可以通過優化模擬過程中的控制參數,以通過橫向切片動作最小化切割力。
蘋果切片的可視化圖。
時間檢驗獎
本屆 RSS 會議的時間檢驗獎頒給了 2008 年發表的一篇論文《 SARSOP: Efficient Point-Based POMDP Planning by Approximating Optimally Reachable Belief Spaces 》,論文作者為 Hanna Kurniawati、 David Hsu 和 Wee Sun Lee,他們當時都來自新加坡國立大學。
論文地址:http://www.roboticsproceedings.org/rss04/p9.pdf
不確定和動態環境中的運動規劃是自主機器人的基礎能力。POMDPs(partially observable Markov decision processes )算法為解決此類問題提供了一個標準的數學框架,但由于其計算復雜度過高而經常在機器人技術中避免使用。
在本文中,研究者旨在為常見的機器人任務創建實用的 POMDP 算法和軟件,為此他們提出了一種基于點的 POMDP 算法 SARSOP ,該算法利用最佳可達信念空間的概念來提升計算效率。在模擬中,研究者成功地將該算法應用于一系列常見的機器人任務,比如沿海導航、抓取、移動機器人探索和目標追蹤等,所有這些任務都被建模為具有大量狀態的 POMDP。他們發現在大多數任務實例中,該算法顯著優于當前最快的基于點的算法之一。
SARSOP 算法。
杰出審稿人獎
個人主頁:https://www.khoury.northeastern.edu/people/lawson-wong/
本屆 RSS 會議的杰出審稿人獎頒給了美國東北大學 Khoury 計算機科學學院的助理教授 Lawson Wong。他是該校通用機器人和人工智能實驗室(GRAIL)的負責人,致力于學習、表示、估計和使用自主機器人發現可能有用的關于世界的知識。他自己感興趣的研究議題是識別和學習可以賦能高效機器人學習和規劃的中間狀態表示,從而實現機器人泛化。總之,他對機器人、機器學習和人工智能等領域的很多課題都感興趣。
2009 年,Lawson Wong 獲得了斯坦福大學的計算機科學榮譽學士和碩士學位。2016 年,他在麻省理工學院完成了博士學位。之后,他擔任布朗大學的博士后研究員和高級研究助理。2018 年,他加入東北大學,任職助理教授。























