













馬斯克發布機器人,“鋼鐵俠”那種!特斯拉推出全球超快AI計算機
本文經AI新媒體量子位(公眾號ID:QbitAI)授權轉載,轉載請聯系出處。
全球最快的AI訓練速度王座,剛剛易主了。
不是英偉達GPU,也不是谷歌TPU……
馬斯克治下的特斯拉,自研AI訓練芯片D1,自研AI超級計算機Dojo ExaPod,首秀即巔峰,登場就是全球第一。
此外,馬斯克還帶來了另一個特斯拉新品:
汽車機器人,搭載了特斯拉包含芯片在內的軟硬件系統,但跟百度的不同,不像汽車更像人。
這就是特斯拉年度AI開放日上,馬斯克再次帶來的一系列激動人心的大進展。
特斯拉自研AI訓練芯片D1發布
馬斯克說:要有一個超快的計算機來訓練Autopilot在內的整個自動駕駛系統。
于是DOJO誕生了。
DOJO,取名源自日語里“練武”專用的道場,顧名思義,DOJO就是特斯拉AI不斷精益功夫的道場。
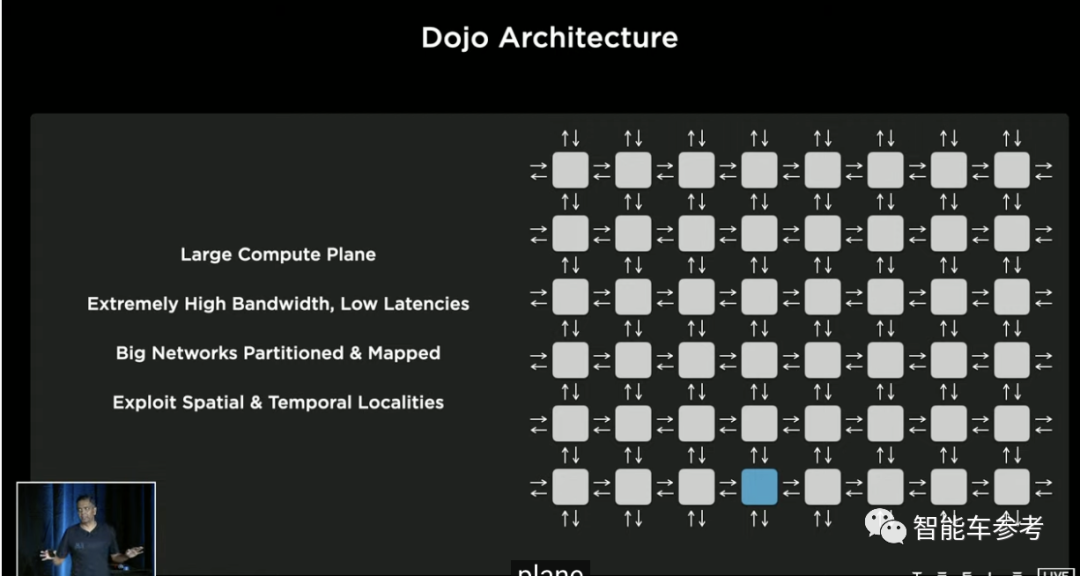
DOJO 是一種通過網絡結構連接的分布式計算架構。它還具有大型計算平面、極高帶寬和低延遲,以及分區和映射的大型網絡。
實際上,在CVPR 2021現場,特斯拉就已經劇透過DOJO的相關性能。
當時總算力達1.8EFLOPS,讀寫速度高達1.6TBps,一度被認為超越全球排名第一的超級計算機富岳,創造超算新紀錄。
但那時DOJO用的是英偉達的A100 GPU,單卡算力321TFLOPS,共計5760張,節點數高達720個。
而現在,DOJO更進一步,自研了“心臟”芯片。
特斯拉首款AI訓練芯片D1,正式發布。
7nm工藝,單片FP32達到算力22.6TOPs,BF16算力362TOPs。
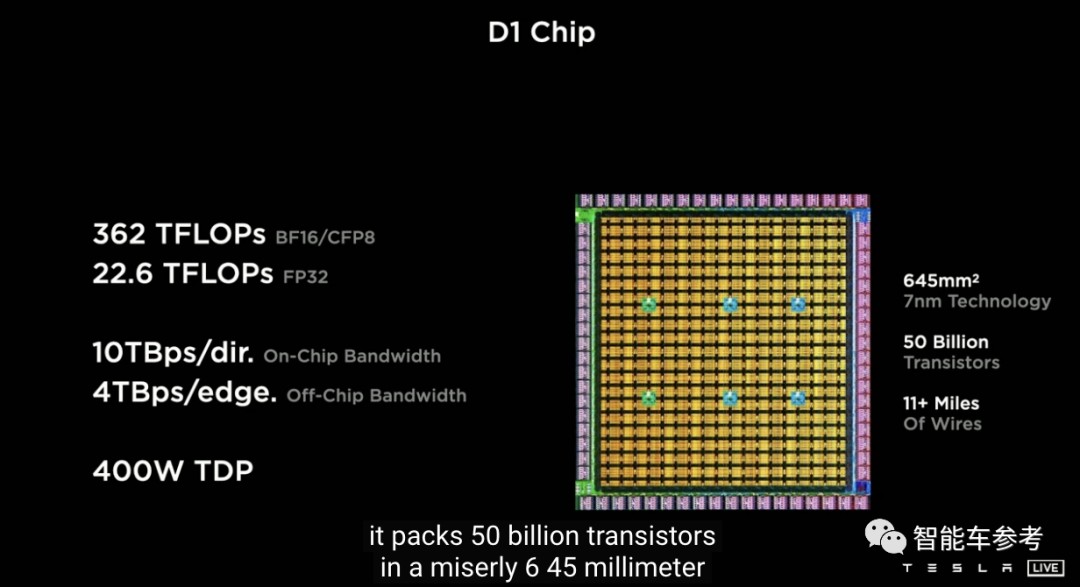
特斯拉發布會現場,還用圖展示性能,拳打英偉達GPU,腳踢谷歌TPU。
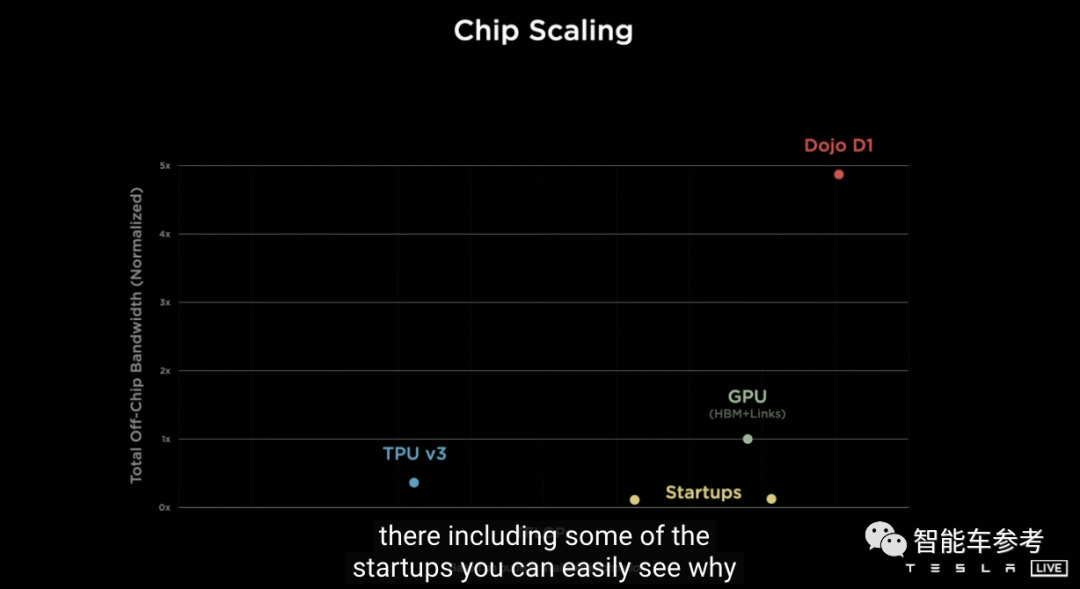
一句話概括,比現在市面上任何芯片都強。
特斯拉也用“Pure Learning Machine”,純學習機器,來稱呼D1芯片。
此外,D1芯片強的不只是單兵作戰能力,還有集團軍作戰能力,它們可以無縫融合,變成超大規模計算陣列。
能有多大,接下來,特斯拉就揭曉了之前預熱海報上的“神秘物種”:
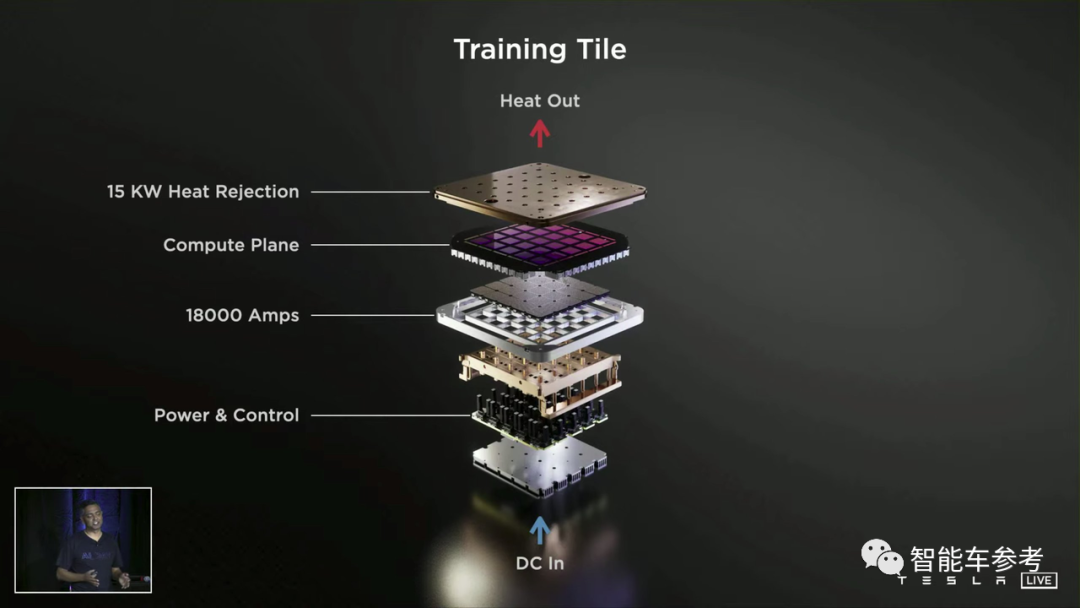
集合了25塊D1芯片的訓練模塊!
這也是特斯拉首個訓練模塊,而把多個模塊集合,就能形成更大算力的訓練陣列:

至此,特斯拉自研超算DOJO完整真身亮相!
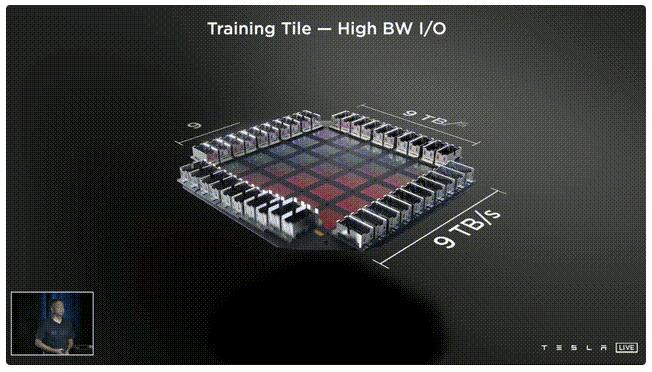
超過50萬個訓練節點。每個模塊算力為9 petaflops,帶寬為36TB/s。
DOJO的可怕之處在于,不同于世界其他超算需要承擔多種不同任務,DOJO的唯一使命就是AI訓練,或者可以說聚焦到自動駕駛算法的訓練。
因為專注,所以首秀即巔峰。
AutoPilot、FSD,特斯拉的其他AI訓練任務,都能在DOJO里更高效練就。
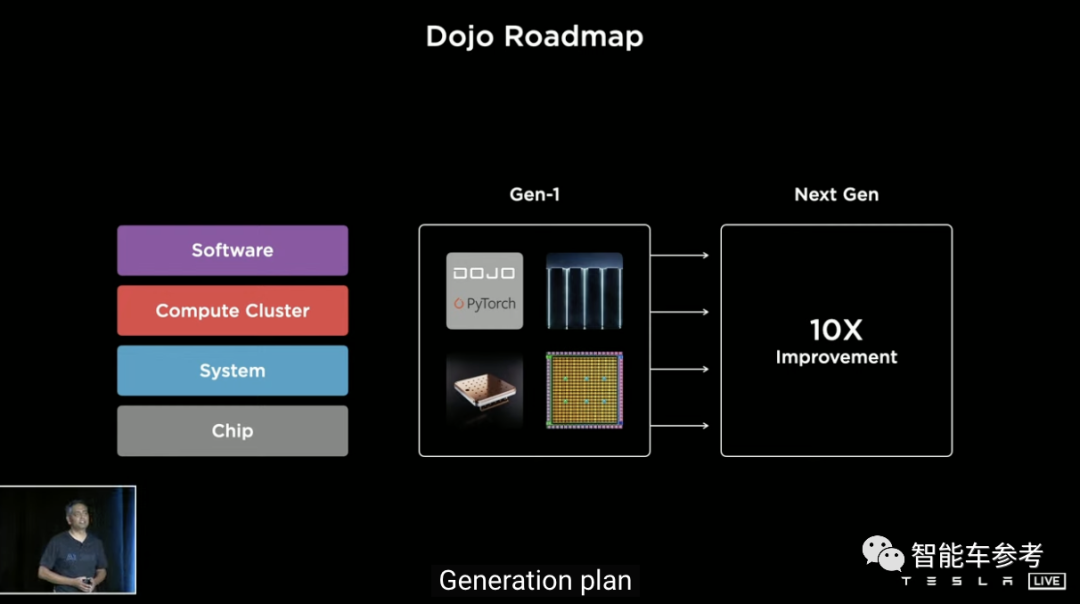
另外,特斯拉官方還繼續劇透:這不是終點,下一代DOJO還會有10倍性能的提升!
所以到這里就完了?拿衣服。
最后也是最強,特斯拉D1支持下的終極大殺器登場:
ExaPOD,集成120個訓練模塊,包含3000個D1芯片,超過1百萬個訓練節點。算力達到1.1EFLOP。
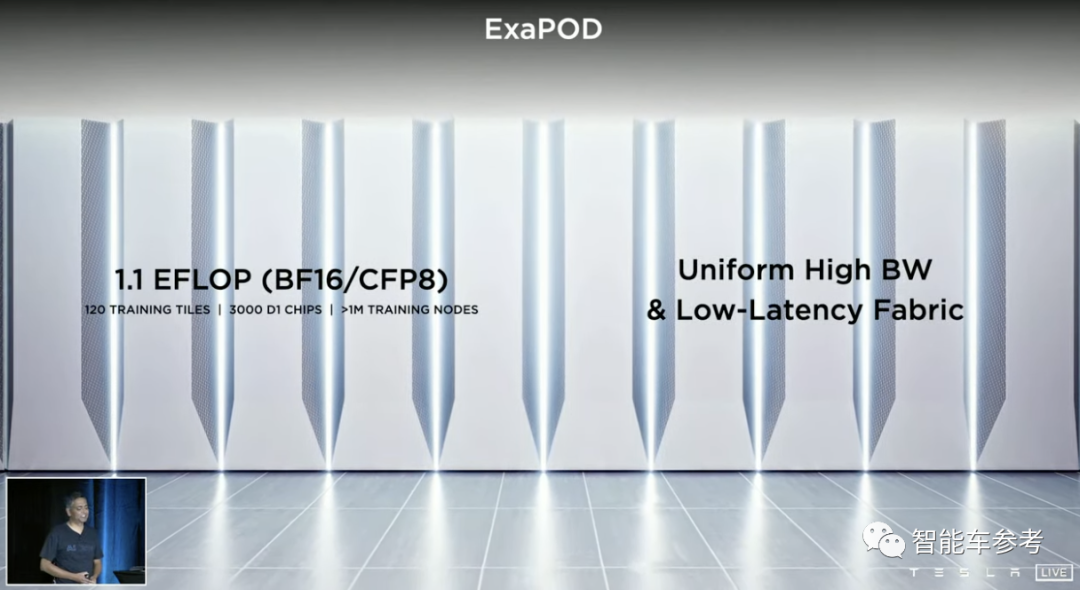
而且每單位能耗下的性能比當今最強超算高1.3倍,但碳排放僅為1/5。
速度和性能,冠絕業內。
于是特斯拉明確:這就是全球最快的AI訓練計算機。
有意思的是,2019年美國能源部曾放言要花6億美元建E級算力的超算,2023年問世……
萬萬沒想到,這個目標被“車企”特斯拉率先實現了。
最強“煉丹爐”為誰而建?
所以問題來了,自研D1芯片有了,最強AI訓練超算DOJO ready了,接下來特斯拉會有怎樣的改變?
特斯拉AI技術主管Andrej Karpathy(李飛飛高徒)登場,介紹了D1芯片和DOJO,主要服務的對象——特斯拉的在自動駕駛方面領先所有對手的“靈丹妙藥”:
純視覺方案。
事故頻出,爭議四起,甚至中國絕大部分玩家都轉向了視覺+激光雷達的綜合方案,但特斯拉依然堅持。
Karpathy詳細介紹了特斯拉高純視覺方案的思路,和現行8攝像頭方案的特點,以及它為什么能work。
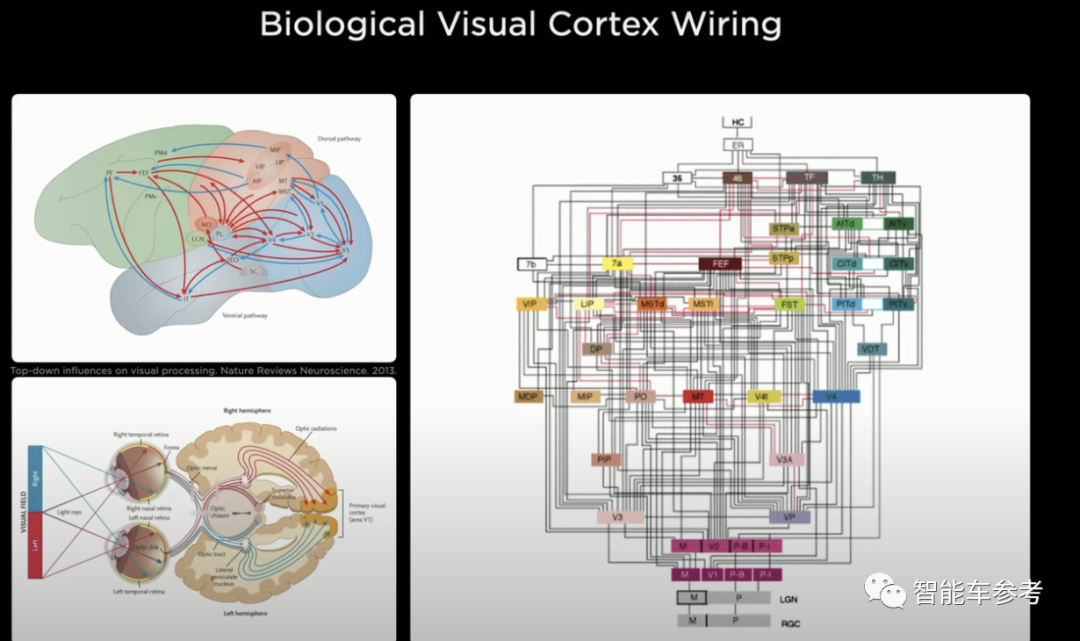
特斯拉純視覺方案,基本構建原則是把自動駕駛系統看作一個生物,有眼睛、有神經、有大腦。
目前的方案有八個攝像頭,背后是被稱為HydraNets——“九頭蛇網絡”的多任務學習神經網絡。
“九頭蛇網絡”可以同時處理目標檢測、交通標志識別、車道預測等等任務,其關鍵在于對各種數據的特征提取,包括不同種類數據的特征共享、對不同任務的分別調參,以及參數緩存,用來加快調參速度。
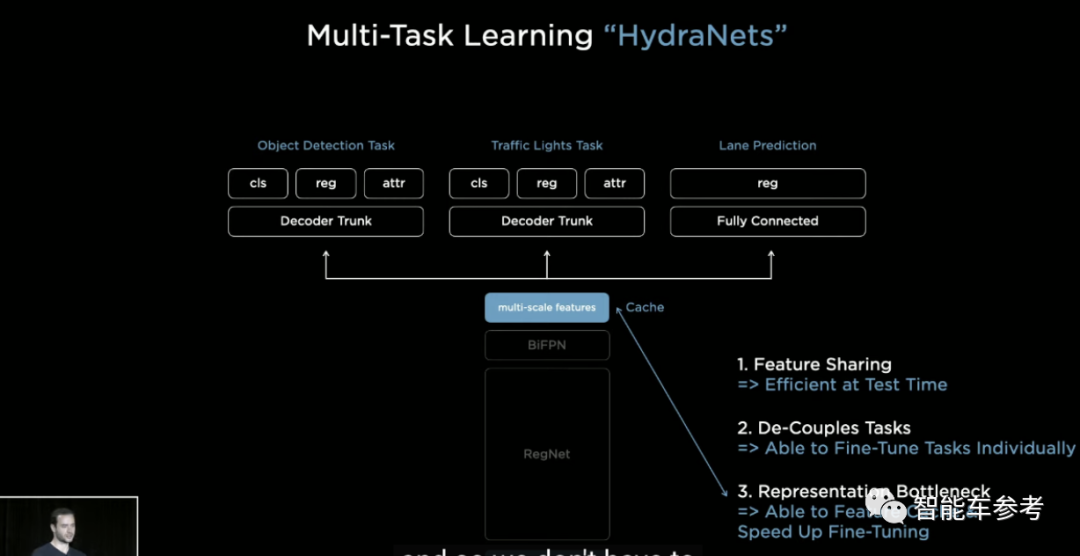
這也是實現FSD敏捷開發,半年內迭代2-3個版本的關鍵。
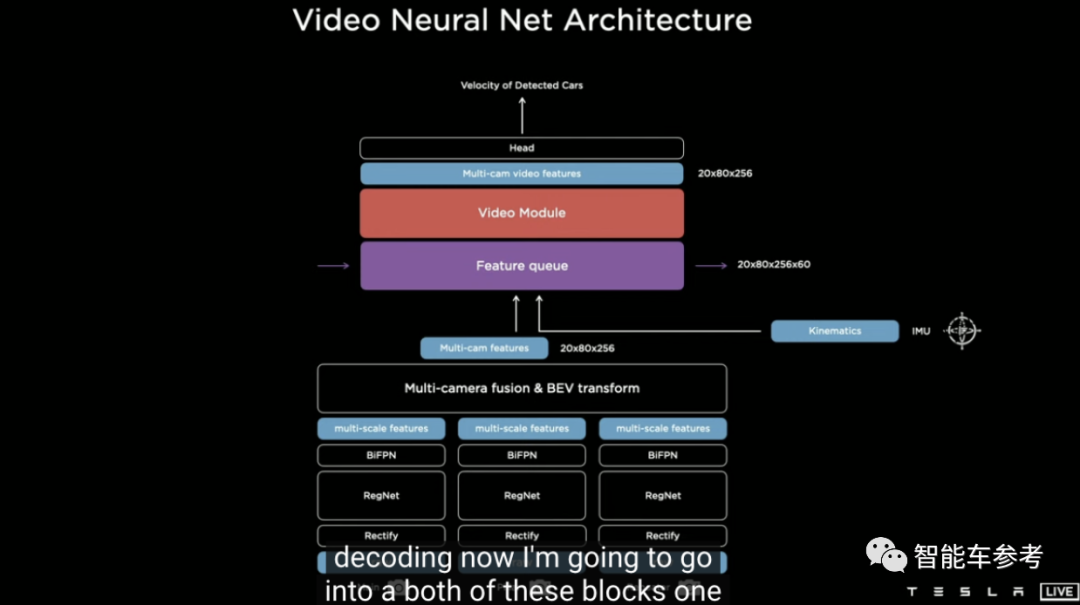
接下來,Karpathy 描述了純視覺方案的歷史,以及方案發展到今天的邏輯,他展示了一段特斯拉處理其圖像數據的視頻。
他說過去 的FSD 雖然很好,但事實證明這樣的系統不夠完善,每個攝像頭能夠檢測到工程師預期的目標,但背后神經網絡的矢量空間是不夠的。
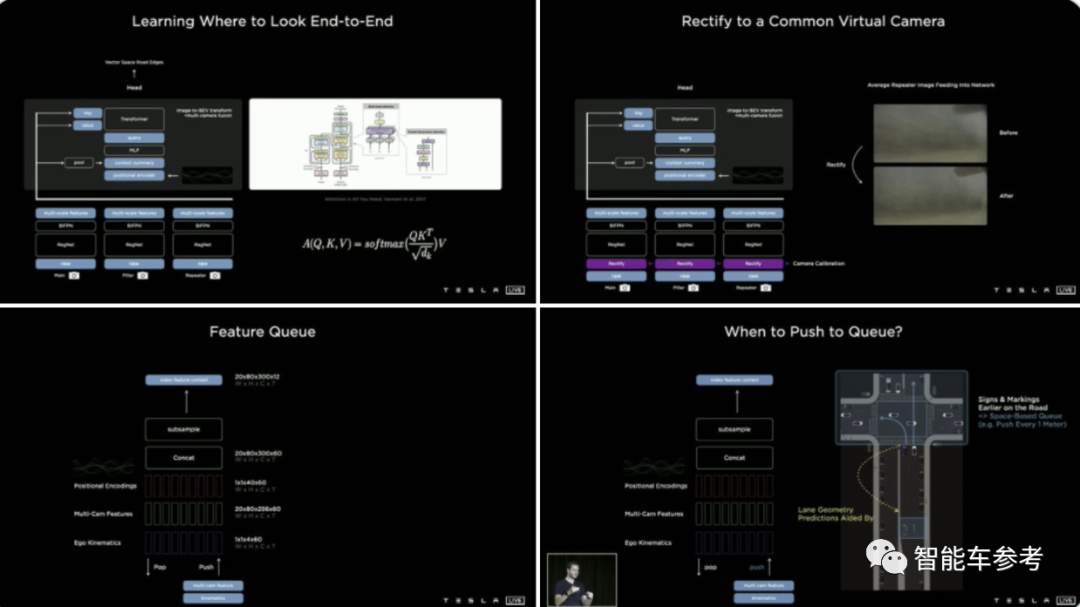
于是,特斯拉如重新設計了神經網絡,就是上面的“九頭蛇”。
另外相機校準、緩存、隊列和優化等等環節都做了最大程度簡化。
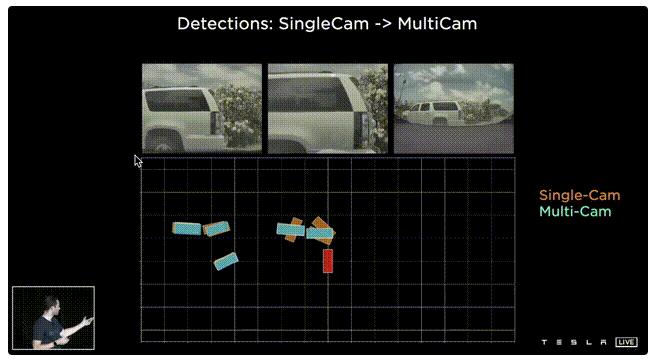
特斯拉方面還比較了多攝像頭方案和單攝像頭方案的差別,相同的場景下,單攝像頭方案識別率明顯低于多攝像頭方案。
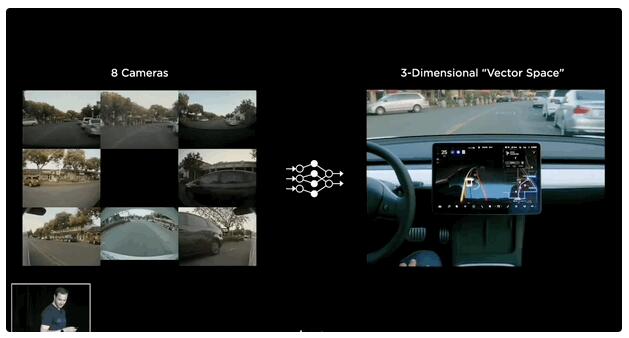
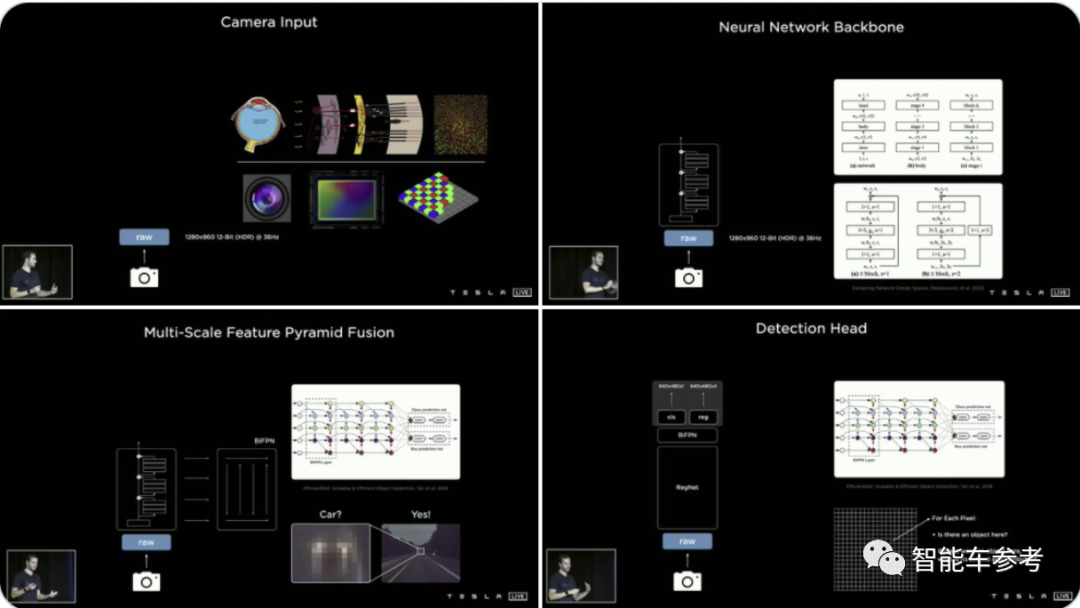
特斯拉車輛上的8個攝像頭獲取原始輸入后,系統會創建各種分辨率的圖像,用于各種功能和目的。
這些不同的圖像會被分別喂給處理不同任務的神經網絡,作為整個自動駕駛系統的決策依據。
接著,Karpathy介紹了特斯拉的“終極建筑師”,即車輛在行駛過程中可以實時對車道、環境建模。
車道線實時建模,其實就是特斯拉自己的高精地圖能力。
中國自動駕駛玩家,強調“高精度地圖”的不少,但特斯拉的思路,“現成資源”不是本質能力,本質能力應該是“創造資源”的能力。
最后,Karpathy談了AI公司常見的數據標注問題,他認為,把數據外包給第三方去做手工標注并不好,所以特斯拉選擇自建團隊來給數據打標,目前已經從2D圖像標記升級到4D矢量空間的標記。
這也是特斯拉自動駕駛不斷快速進化的核心所在。
依靠人工標注,顯然無法應對量產車上路后的大規模數據,所以只有自動化標注,才能形成數據閉環。
開放日上,特斯拉也展示了如何從車道線、2D圖像……一點點躍遷至4D標注和建模的。
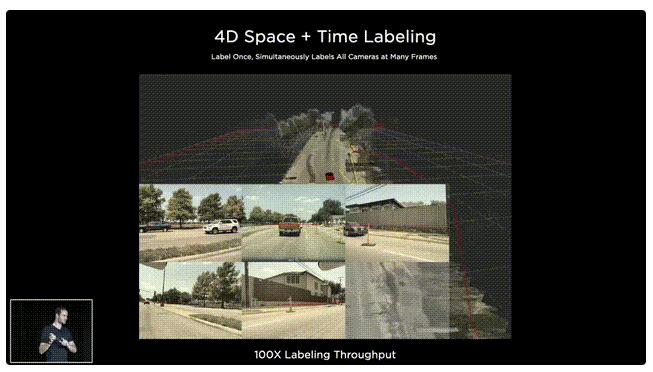
行人、車輛、樹木,建筑物……清清楚楚,而且還有意圖識別。

特斯拉方面也強調,基于類腦一樣的感知系統、自動化標注能力,以及仿真,確保了特斯拉為什么可以基于純視覺實現更高維度的自動駕駛。
仿真,簡單講就是利用現實數據,將真實世界的實時動態景象,在計算機系統實現重新構建和重現。
這套模擬程序,用特斯拉的話說,就是一個以自動駕駛為玩家的視頻游戲。
在這套系統里,任何要素都可以被添加其中,包括奇葩的極端場景。
比如這里,人太多導致目標難以標注,車輛極多:
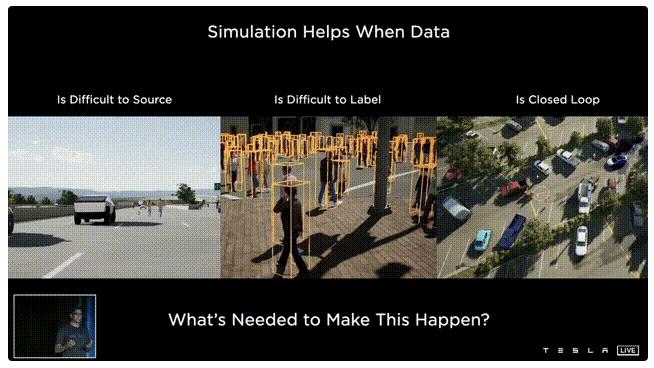
特斯拉這里還不忘補刀一下毫米波雷達——純視覺也能做很好,所謂的雷達冗余作用有限。
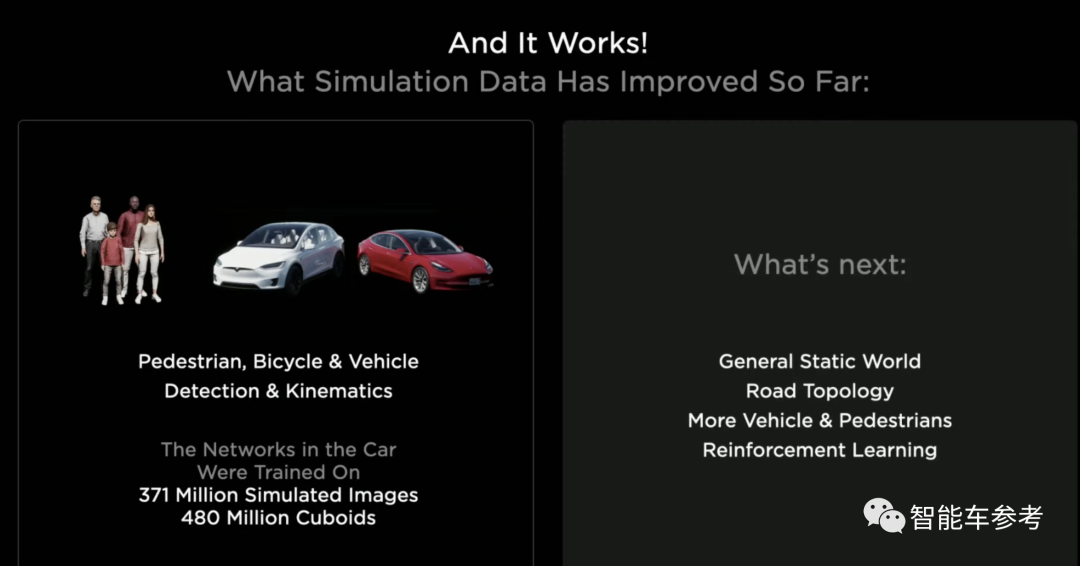
特斯拉方面還披露,現在標注和仿真系統,可以模擬數量高達3.71億的數據及場景。
當然,自動駕駛最后還得解決從比特世界走向原子世界應用的問題。
這次特斯拉主要披露了控制和規劃方面的進展。
特斯拉自動駕駛總監Ashok Elluswamy,分享了特斯拉針對復雜場景的規劃方案——“混合規劃系統”。
主要思路和技術方法是基于蒙特卡洛樹搜索,實現最佳路徑規劃。
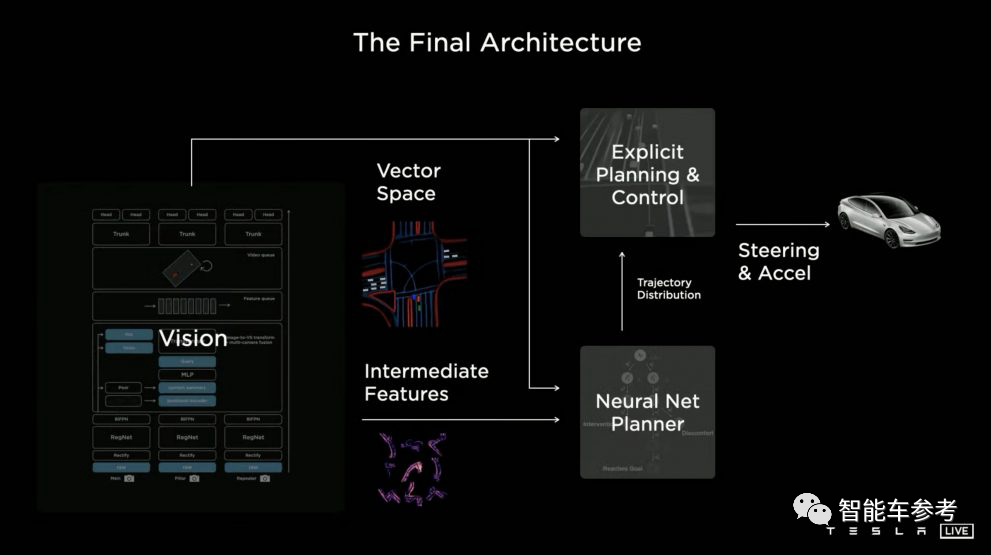
最后,整個特斯拉自動駕駛從感知到決策規劃,一圖概括如下:
One more thing:特斯拉“機器人”
最后的最后,就在大家都以為發布會完全就是自動駕駛相關內容之際……
“簡短茶歇”環節,竟然來了一段“機器人熱舞”——宛如衣服Model一樣的穿著,樣子非常“硅基”。
這是特斯拉的行為藝術?
不不不,再次出乎意料。
馬斯克再次登臺,然后鄭重其事發布:特斯拉機器人。
身高5英尺8英寸,約為172cm;重量125磅,約為56.7kg;承載能力為45磅,約為20kg。
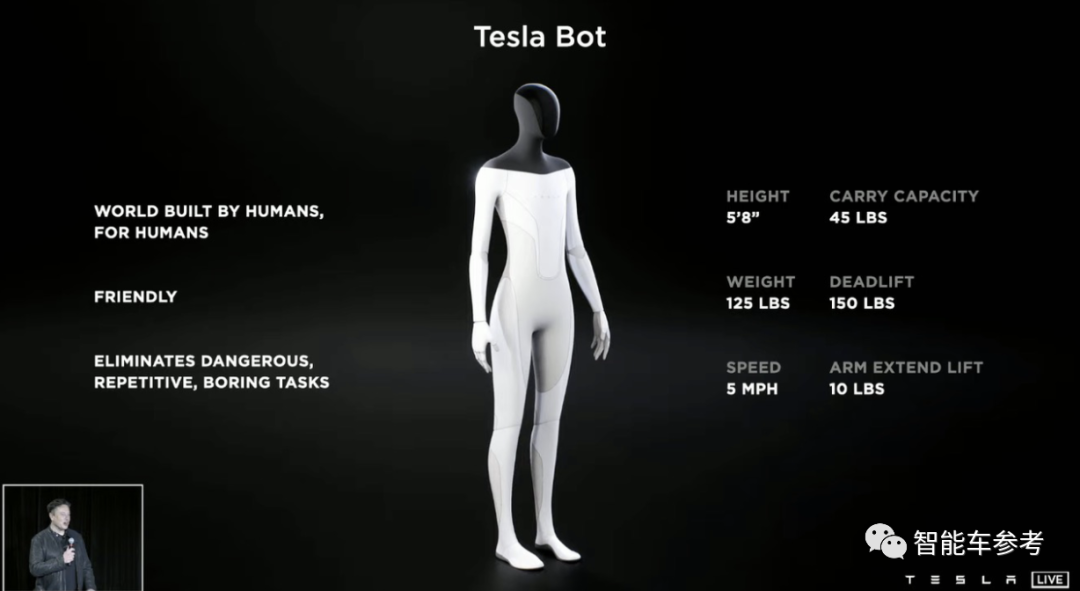
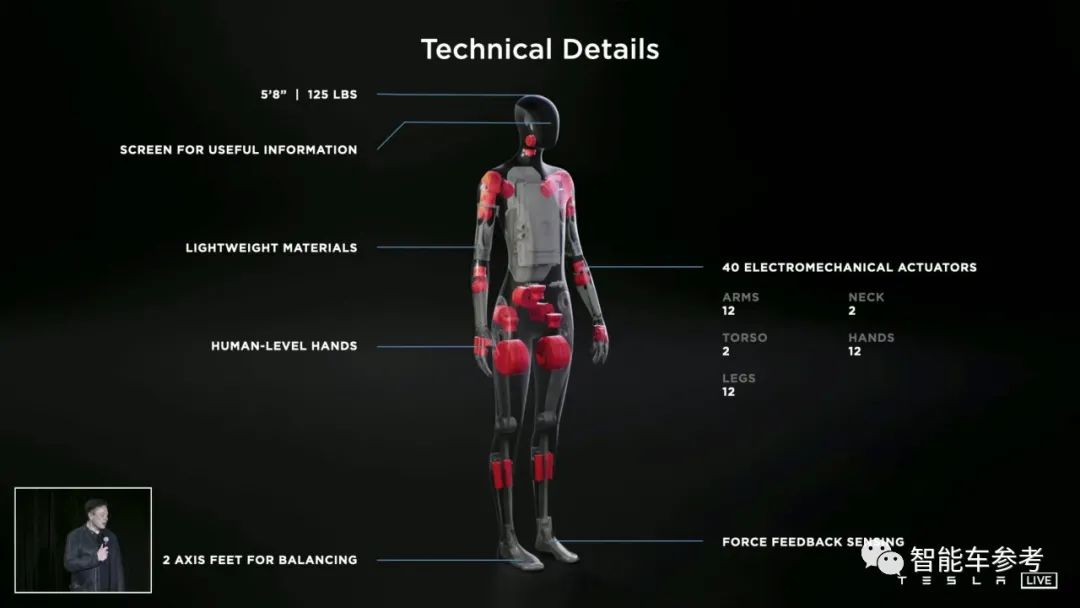
它的面部是一個顯示屏,用來顯示重要信息。
從外形上看,四肢和人類一樣。
為了實現平衡性和敏捷性,四肢使用了40個機電推桿。
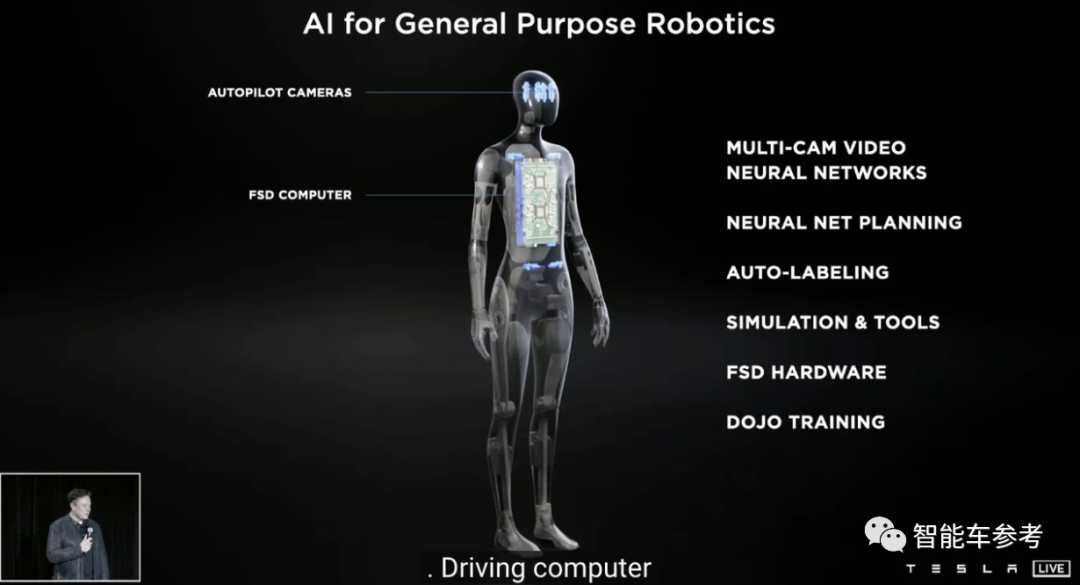
同時,特斯拉各項AI和芯片技術,都會應用其中。
比如使用Autopilot的攝像頭充當感知系統,胸腔里內置特斯拉自研芯片——FSD同款,還會加持多項特斯拉已開發出的技術,如多攝像頭視頻神經網絡、規劃能力、標記。
而且馬斯克強調,這不是玩具周邊,它會最終實現——可能明年就會正式推出,這是特斯拉電動車的下一步。
硅谷鋼鐵俠還說,他會是一個非常有用的機器人,由人打造,為人服務,而且會確保一直對人友好,能把人從危險的、重復的,無聊的任務中解放出來。
甚至還能跟已經高度自動化的特斯拉車輛生產進一步結合協作。但按照馬斯克的意思,首要的應該是“做家務”。
有意思的是,隨著特斯拉這個“機器人”發布,太平洋兩岸都把“機器人”作為了智能車變革的下一步。
中國這邊,百度李彥宏剛剛推出了一款“汽車機器人”,不過更像“汽車”而不是“人”。
美國那頭,馬斯克的特斯拉機器人,更像“人”而不是“汽車”。
這種區別,也可能跟馬斯克的那個江湖綽號有關。
伊隆·馬斯克,不就是現實版鋼鐵俠嗎?


























