為提高機器人物體堆積能力 DeepMind提出了新基準
作者:Yu
對大多數人來說,將一個物體疊加在另一個物體上是一項簡單的任務。但即使是最復雜的機器人也很難同時處理多個這樣的任務。這是因為堆疊需要一系列不同的運動、感知和分析技能,包括與不同種類物體互動的能力。

對大多數人來說,將一個物體疊加在另一個物體上是一項簡單的任務。但即使是最復雜的機器人也很難同時處理多個這樣的任務。這是因為堆疊需要一系列不同的運動、感知和分析技能,包括與不同種類物體互動的能力。這項任務的復雜程度已使其成為機器人領域的重大挑戰。
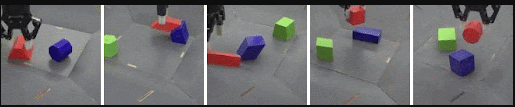
DeepMind的一組研究人員認為,要推進機器人堆疊技術的發展,需要一個新的基準。在將于2021年在機器人學習大會(CoRL 2021)上發表的一篇論文中,他們介紹了RGB-Stacking,即讓機器人學習如何抓住不同的物體,并讓它們在另一個物體上保持平衡。雖然在文獻中已經有了堆積任務的基準,但研究人員斷言,他們的研究之所以與眾不同,是因為所使用的對象的多樣性,以及為驗證他們的“發現”而進行的評估。研究人員在論文中寫道,結果表明,模擬和真實數據的結合可以用來學習“多對象操作”。
研究人員表示:“為了支持其他研究人員,我們正在開放模擬環境的一個版本,并發布用于構建真實機器人RGB堆疊環境的設計,以及RGB對象模型和用于3D打印它們的信息。我們還在更廣泛地開放用于機器人研究的圖書館和工具。”
據DeepMind的研究人員稱,學習過程確保機器人通過對多個對象集的訓練獲得通用技能。RGB-Stacking故意改變抓取和堆疊的特性,這些特性定義了機器人如何抓取和堆疊每個物體,這迫使機器人表現出超越簡單的拾取和放置策略的行為。
隨著機器人在堆疊和抓取物品方面變得更加熟練,一些專家認為,這種類型的自動化可能會推動制造業迎來新一輪發展。
責任編輯:姜華
來源:
比特網