













研究人員利用深度學習模型預測交通事故
譯文【51CTO.com快譯】當今世界猶如一個用混凝土和瀝青澆筑而成的巨大迷宮,道路密布,縱橫交錯,我們自由地驅車馳騁其間,日行萬里也不再是夢。
可以說技術的進步促成了這一切:GPS導航讓我們基本不會在陌生的地域迷途;攝像頭警示我們避免可能造成的昂貴擦傷;新能源汽車的出現讓燃料成本更低......值得關注的是,盡管我們已經體驗到了無數與道路相關的技術進步,但在道路安全措施上技術的發展似乎力有未逮。當下,我們仍然只能依靠固定的交通燈、公認的行車規則和汽車自身的安全系數來保護我們從A地到達B地。因此車禍依舊可能成為很多人始料未及的噩夢。
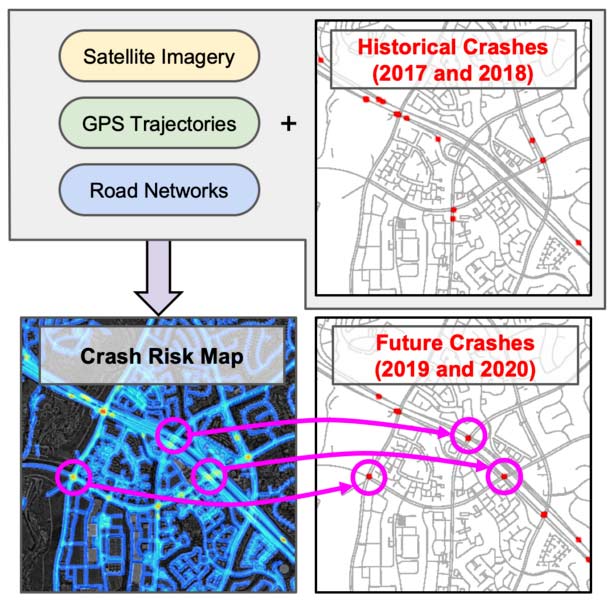
為了對抗這一不確定性,來自麻省理工學院計算機科學與人工智能實驗室(CSAIL)和卡塔爾人工智能中心(QCAI)的科學家們開發了一套深度學習模型,實現高分辨率的車禍風險預測地圖。在歷史車禍數據、道路地圖、衛星圖像和GPS追蹤的基礎上,風險地圖描述了未來一段時間內的預期車禍數量,以確定高風險區域并對未來做出預警。
通常情況下,這類風險地圖的分辨率要低得多,約在數百米左右,這意味著由于道路變得模糊,很多關鍵細節將被掩蓋。然而,新地圖是基于5×5米的網格單元,更高的分辨率帶來了新的洞察。科學家們發現,高速公路比附近的住宅道路有更高的風險,匝道合并和退出高速公路的風險比其他道路的風險更高。
麻省理工學院CSAIL博士生何松濤說:“通過捕捉潛在的風險分布,推定未來各地發生車禍的概率,在沒有任何歷史數據的情況下,我們可以找到更安全的路線,使汽車保險公司能夠根據客戶的駕駛軌跡提供定制的保險計劃,幫助城市規劃者設計更安全的道路,甚至預測未來的車禍。”
盡管車禍是小概率事件,但它造成的損失約占世界GDP的3%,而且是兒童和年輕人死亡的主要原因。但總體上看,它的發生在時空上還是比較稀疏的,這種稀疏性使得在如此高的分辨率下推斷地圖成為一項棘手的任務。在一個5 × 5的網格單元中,平均每年發生車禍的幾率大約是千分之一,最關鍵的是它們很少在同一地點發生兩次。之前預測車禍風險的嘗試大多是“歷史性的”,因為一個地區只有在附近曾經發生過車禍時才會被認為是高風險的。
這支研究團隊投下了一張更廣泛的網來捕捉關鍵數據。它利用GPS軌跡模式和描述道路結構的衛星圖像來識別高風險地點,前者提供了關于交通密度、速度和方向的信息,后者則描述了道路結構,如車道數量、是否有路肩或是否有大量的行人。經過學習后,即使一個高風險地區沒有撞車記錄,僅根據其交通模式和拓撲結構,它仍然可以被確定為高風險。
為了評估該模型,科學家們調用了2017年和2018年的車禍和數據,并測試了該模型在2019年和2020年預測撞車事故方面的表現。許多地點被確定為高風險地區,即使之前沒有歷史記錄,在隨后的幾年里也發生了事故。
“我們的模型通過結合來自看似不相關的數據源的多個線索,可以從一個城市應用到另一個城市。這是邁向通用人工智能的一步,因為我們的模型可以預測未知領域的車禍地圖。”卡塔爾計算研究所(QCRI)的首席科學家、論文作者阿明·薩德吉(Amin Sadeghi)說,“即使在沒有歷史車禍數據的情況下,該模型也可以用來推斷出有用的事故地圖,通過比較想象的情景,這可以轉化為對城市規劃和政策制定的積極作用。”
該數據集涵蓋了洛杉磯、紐約市、芝加哥和波士頓的7500平方公里。在這四個城市中,洛杉磯是最不安全的,因為它的車禍密度最高,其次是紐約市、芝加哥和波士頓。
“如果人們能夠使用風險地圖來識別潛在的高風險路段,他們就可以提前采取行動,減少他們出行的風險。像Waze和蘋果地圖這樣的應用程序都有事故功能工具,但我們正試圖走在車禍的前面--在它們發生之前有所作為,”阿明·薩德吉說。
查看原文:
Deep learning helps predict traffic crashes before they happen
【51CTO譯稿,合作站點轉載請注明原文譯者和出處為51CTO.com】


















