













澳門大學須成忠:「保守」無法推動智能駕駛行業進步

本文轉自雷鋒網,如需轉載請至雷鋒網官網申請授權。
2021 年 12 月 10 日,由雷峰網 & 新智駕主辦的第四屆「全球智能駕駛峰會」在深圳正式召開。
這一次,雷峰網新智駕以「智能駕駛鏖戰時刻 」為主題,將話筒遞給業內 19 家標桿企業,輻射 13 大技術/場景,覆蓋智能駕駛算法、芯片、感知、落地等多個維度,每個領域只篩選最具代表性的一家企業。
遵循“基礎理論技術創新”和“行業解決方案落地”兩項黃金標準,演講嘉賓向行業分享他們對過去經驗的總結回顧、對未來趨勢的預測以及行之有效的模式的分享。
峰會之上,澳門大學科技學院院長須成忠帶來了題為「車路協同下的無人駕駛研究與展望」的精彩演講。
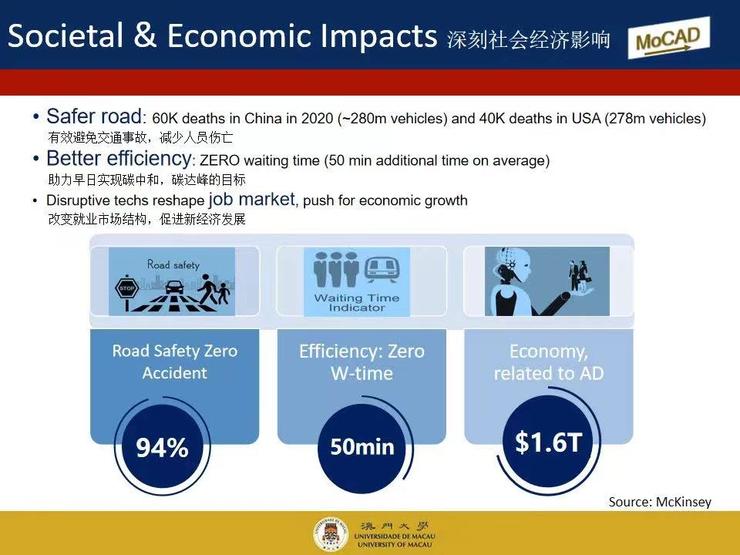
須成忠在會上指出,智能駕駛催生了新的經濟、新的時代,所以對人們的生活、社會將產生重大的影響。
相對于國外的市場環境,國內對智能駕駛事故的容忍度很低,所以業界玩家謹小慎微。但大家應該知道,在保守的策略下,事故少不代表技術好,同時大家也應該牢記,失敗是成功之母。
為此,須成忠還向業界呼吁,要大膽地測試,如果永遠秉持保守的策略,技術很難有實質性的進步。
至于如何推動技術創新,須成忠也強調了諸多要點。比如,現階段智能駕駛的實現很大程度上依賴于深度學習,但深度學習沒法完全保證系統可靠性的問題,應該利用多個信息源,構建可信環境的全息感知。
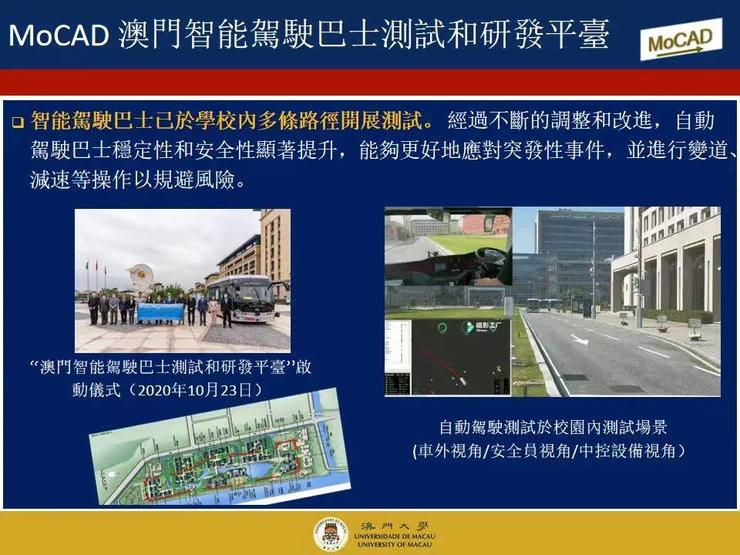
目前,須成忠已經帶領團隊搭建了一個自動駕駛測試巴士平臺,經過不斷調整、改造,自動駕駛巴士的穩定性、安全性也得到了迅速提升,正在澳門大學校園里的公共開放道路進行試運營。
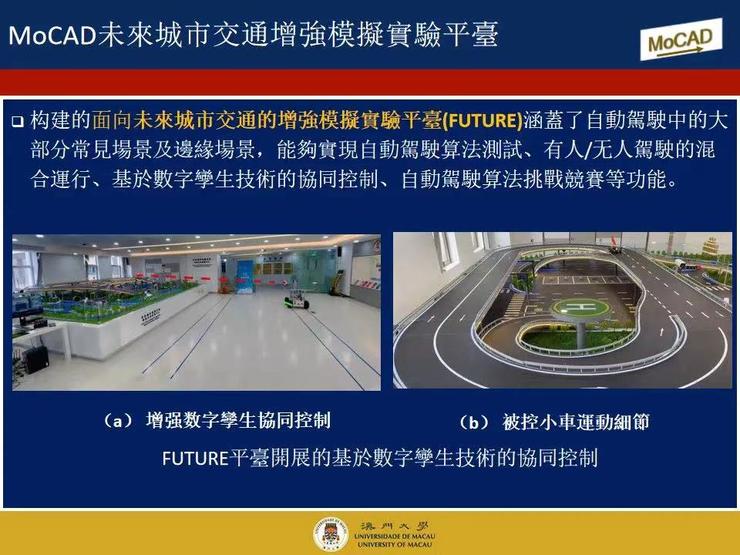
另外,須成忠的團隊還打造了一個面向未來交通的增強模擬實驗平臺,涵蓋了自動駕駛中大部分場景場景以及邊緣場景、能夠實現自動駕駛算法測試、有人/無人駕駛混行、基于數字孿生的協同控制、自動駕駛算法挑戰賽等功能。
以下是須成忠演講全文,雷峰網新智駕做了不改變原意的整理與編輯:
大家上午好!非常慚愧,剛才主持人說我是業界的領軍(人物),但是我不敢當。我看了一下今天上午的演講嘉賓,我是唯一一個來自學界的,又是開場嘉賓,所以會給大家多講一點技術,演講的題目是「車路協同下的智能駕駛技術研究與展望」。
我來自澳門大學,澳門大學有一個科技部智慧城市物聯網國家重點實驗室,我負責智慧交通,而智慧交通又包含了智能駕駛。
大家現在談智慧城市、智慧交通、智慧出行,這幾個熱門賽道非常重要的趨勢就是網聯化、自動化、共享化、電動化。我們今天談的是網聯化和自動化,汽車怎么自動駕駛,以及自動駕駛怎么逐漸和車路協同結合起來,這些會對人們的日常生活、社會經濟、道路安全等多個方面產生影響。

先給大家稍微科普一下自動駕駛的歷史。事實上,在汽車誕生之初,人們就已經憧憬過汽車的自動駕駛功能,但直到2004 年的 DARPA 挑戰賽才開始萌芽,開始自動駕駛的新紀元。
不過,2004 年并沒有任何一個參賽車隊順利完成比賽;2005 年有了進步,五個自動駕駛車隊達到了終點;2007 年,DARPA 挑戰賽將賽場從沙漠拓展到了城市道路,當時有兩個車隊分別在兩個場景下獲得冠軍,隨后 Google 將兩支車隊收入囊中,開創了今天意義上的智能駕駛時代。
隨后,各路智能駕駛玩家出現,各種技術路線風起云涌。在國內,百度于 2013 年啟動自動駕駛的研究,包括今天在座的很多業界翹楚都在做智能駕駛,都在無人配送、無人出租車、無人貨運、無人巴士等細分領域深耕。這一切的核心是基于數據驅動的智能駕駛。

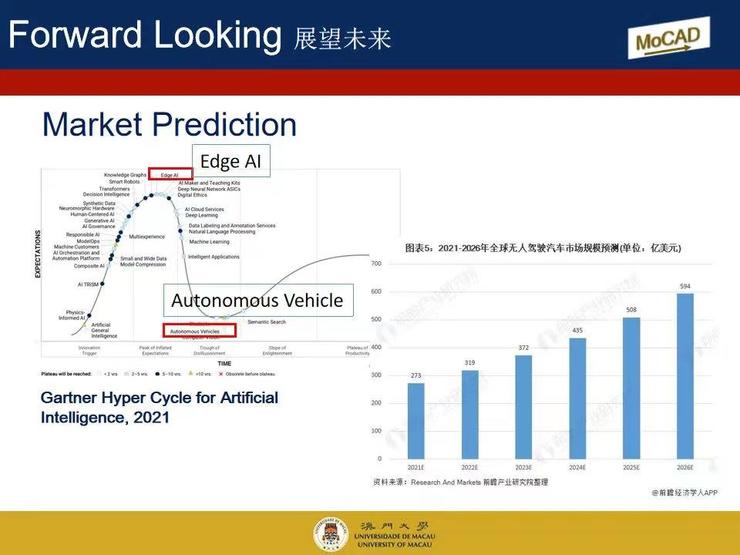
有調研報道,2023 年所有汽車或多或少都有會具有自動駕駛功能,從自動泊車,到輔助駕駛,再到智能駕駛甚至是無人駕駛,這是回避不了的趨勢。2021 年也有許多市場調研報告表明智能駕駛方興未艾、非常火爆,盡管它之前經歷了一輪的高峰走向低谷。

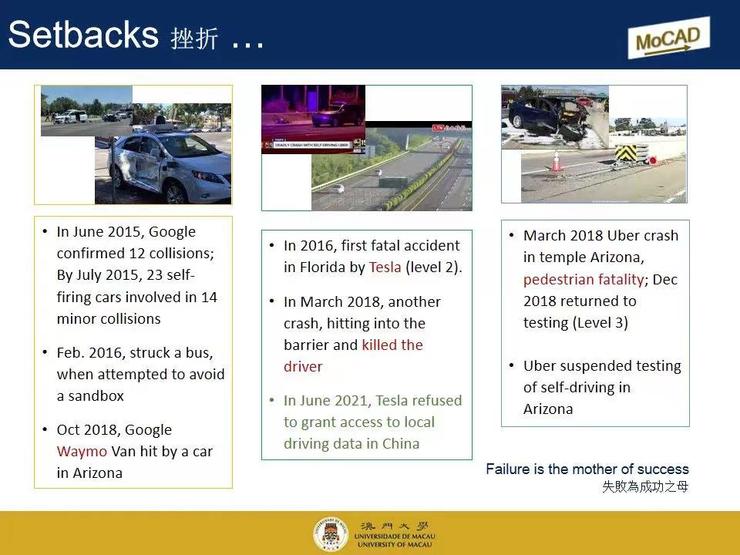
實際上,新技術的誕生都會有這樣那樣的坎坷經歷,從最早的 Waymo、Uber,到現在的特斯拉等車企,媒體不斷地追蹤報導與自動駕駛相關的事故。Waymo 是在實驗室做測試,而特斯拉采取的策略是是讓用戶幫忙做測試。
我在這里要說的是,中國市場沒有出現這樣的事故,并不是說我們的技術做得多好、多牛,而是我們的文化,很難容忍智能駕駛事故。但我們應該知道失敗是成功之母,沒有失敗就沒有成功。
今天有很多業界的朋友在這里,所以我要呼吁一下:要大膽地測試,如果永遠秉持一種保守的策略,我們的技術很難進步。這是我個人的理解!
關于智能駕駛,澳門正在進行一個叫做“MoCAD”(Mocau Connected and Automative Driviving)的智能駕駛技術研究項目,目前是我在負責。我們團隊有一個愿景,即打造高可靠、高可信的無人駕駛核心關鍵技術,解決無人駕駛推廣應用中存在的技術問題。同時打造智能駕駛車載平臺和車路協同智能駕駛實驗基地;目標就是要解決三個問題:如何幫助智能駕駛從封閉場景走向開放場景、如何幫助單車智能實現協同智能、如何利用“云端”智能實現自動駕駛的超智能。


下面我給大家簡單介紹一下我們正在做的一些工作。首先我們搭建了一個智能駕駛巴士測試和研發平臺,經過不斷調整、改造,基于該平臺打造的智能駕駛巴士的穩定性、安全性都得到了迅速提升,能夠很好地應對突發性事件。目前,車輛在澳門大學內進行測試運營,校園里基本都是公共開放道路。
不僅如此,我們還打造了一個面向未來城市交通的增強模擬實驗平臺,基于數字孿生,涵蓋智能駕駛過程中常見場景以及邊緣場景,實現自動駕駛算法測試以及有人/無人駕駛的混行。
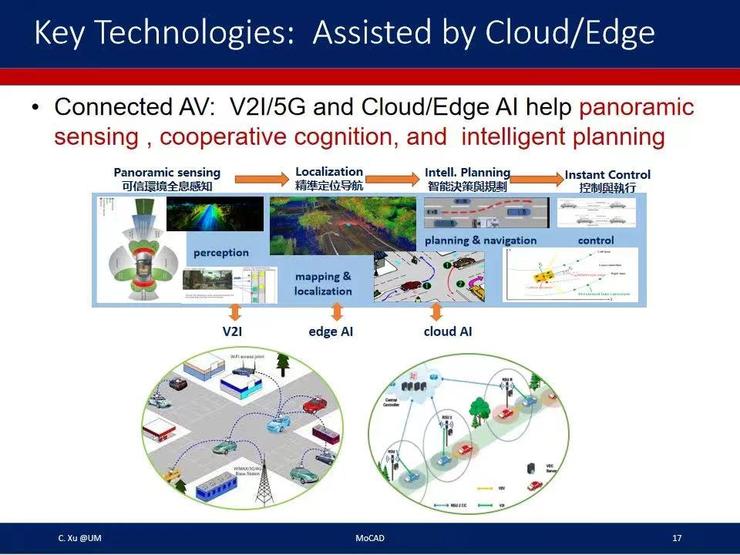
同時,我們還在校園里部署了基于 V2X 車聯網的車路云協同技術,即澳門自動駕駛車路協同平臺。

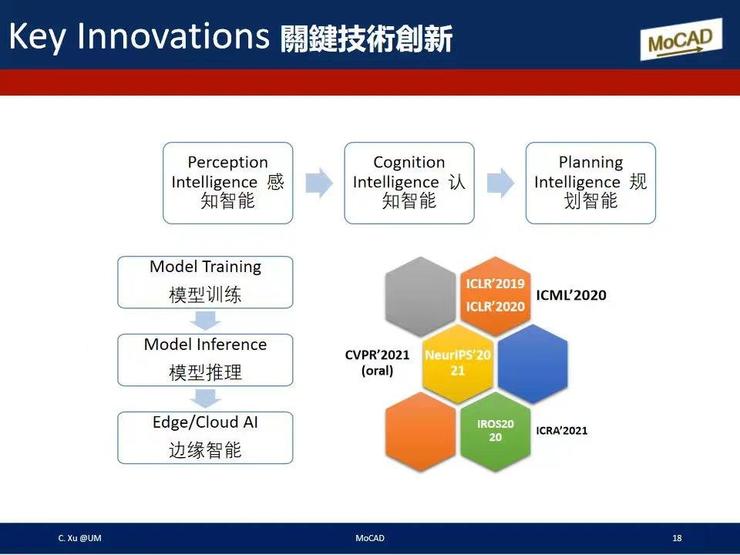
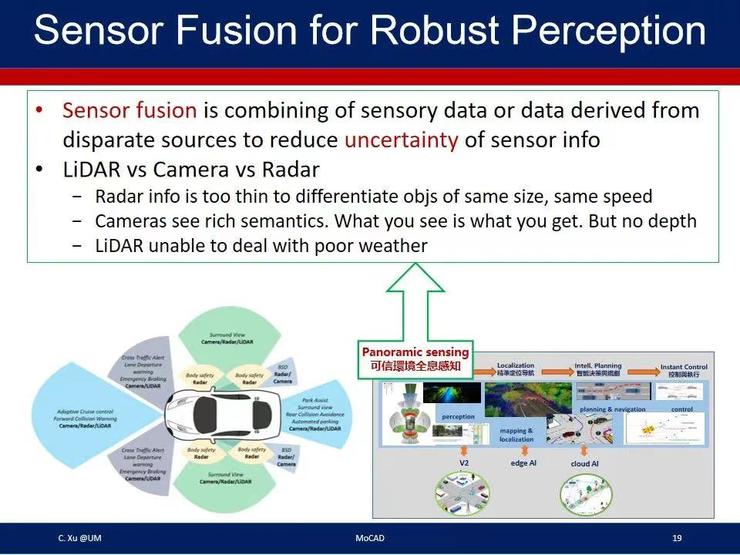
在一些關鍵技術上,我們也進行了探索創新。對于智能駕駛來說,感知是必不可少的一環,我們希望車輛對環境的感知能夠通過 AI 技術來進行融合,從而實現正確的認知、規劃以及控制。另一個關鍵技術關于車聯網和邊緣計算,這兩者怎么輔助車路感知、怎么實現協同認知、怎么最好決策與規劃,我們也在探索。
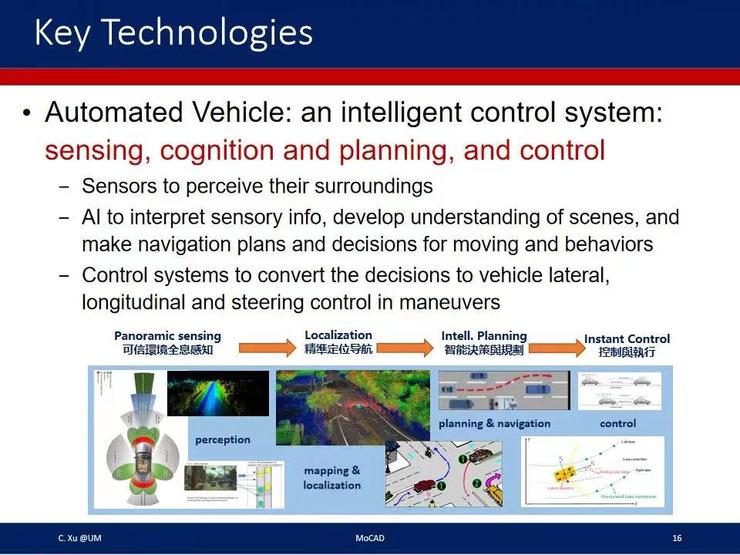
目前,從感知智能到認知智能到規劃智能,可以看作是基于數據驅動的橫向發展,那么縱向發展就是基于深度學習的模型訓練、模型推理、及邊緣智能。
首先是可信環境全息感知。單個傳感器總是有不確定性、不可靠性,我們要學會利用多個信息源,融合各個傳感器的優點提升信息感知的可靠性。譬如,很多時候攝像頭無法抵御外界的擾動(雨雪天氣或是人為破壞),可能會出現“南轅北轍”的識別結果,從而導致系統可靠性的出現問題。
我們針對此我們提出的基于對攻防御的方法在人工智能頂會 CVPR’2021 以會議最高宣讀形式發表;同時也參加了 CVPR 的安全挑戰賽,獲得亞軍的成績。

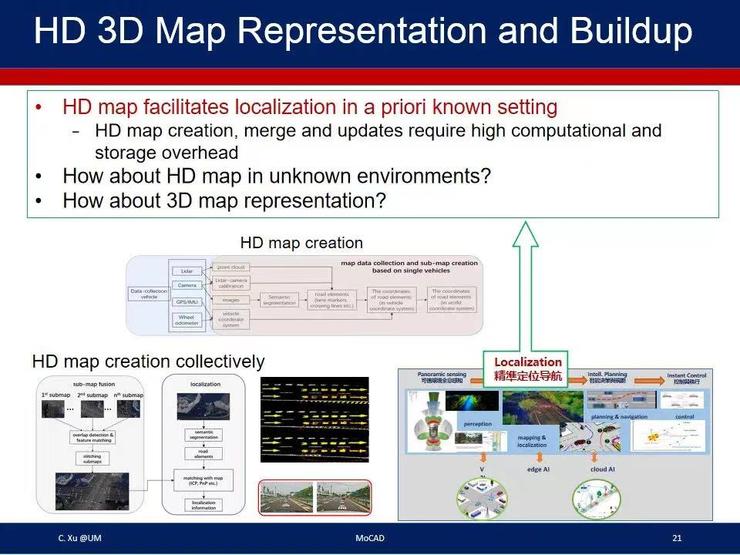
除了多傳感器融合,還要解決在未知場景中的精確定位認知問題。現在業界的智能駕駛車輛,上路前都會將道路數據收集好、搭建高精地圖,也就是所謂的預先性。那么,在未知場景中,車輛怎么進行自學習?自學習功能怎么訓練?怎么提升整個系統的能力?這些都需要大家去思考。
還有就是地圖導航,現在業界對地圖的使用非常廣泛,包括數據的采集以及拼接等。那么,我們怎么利用邊緣計算以及云計算來進行高精度定位?怎么在未知場景下,通過自有探索方法來建圖? 傳統的地圖是2D的,自動駕駛需要3D地圖以更好適應路況的變化。比如如何基于點云構造三維高精地圖?因為點云存儲量較大,但智能駕駛車輛的存儲空間非常有限。高精地圖如何表示才能使得相關工作的存儲表達更加高效?針對所有這些問題,我們提出了一系列有針對性的高效方法,相關論文在自動駕駛會議 IROS和ICRA上。
在智能決策與規劃方面,宏觀的導航問題已經基本解決,微觀的實時控制也隨著線控技術的發展變得越來越成熟。相比之下中觀的決策規劃更有挑戰性。在道路空曠路段,要做好靜態物體的實時檢測避障、交通標記的識別并滿足交通規則等;在有其他交通參與者的時候,更要檢測動態物體并解決道路共享問題。傳統的方法是基于規則,但適應性較差。最新的思路是基于模型訓練的深度學習方法。
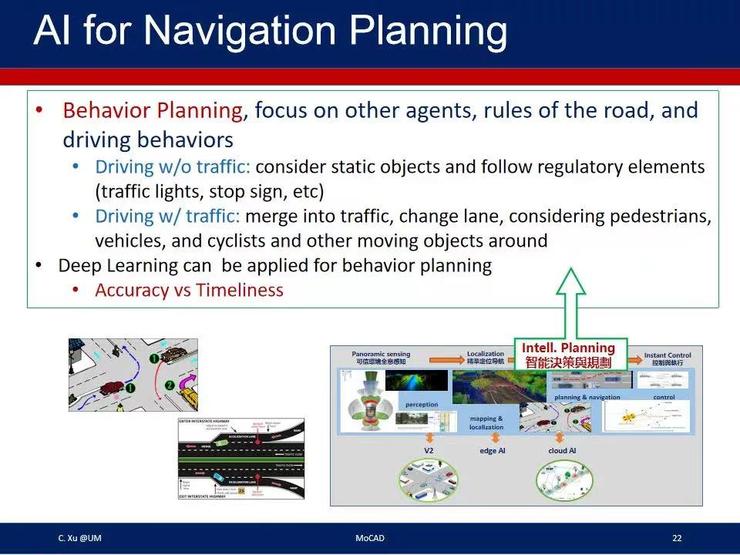
當我們把訓練好的模型放到應用到車輛上,還涉及到一個規劃決策實時性的問題。這也與車輛的允許速度密切相關。之前跟業界交流,大家也都普遍認為高速駕駛挑戰較大,因為既要在確保精度的同時,又要保障實時性。
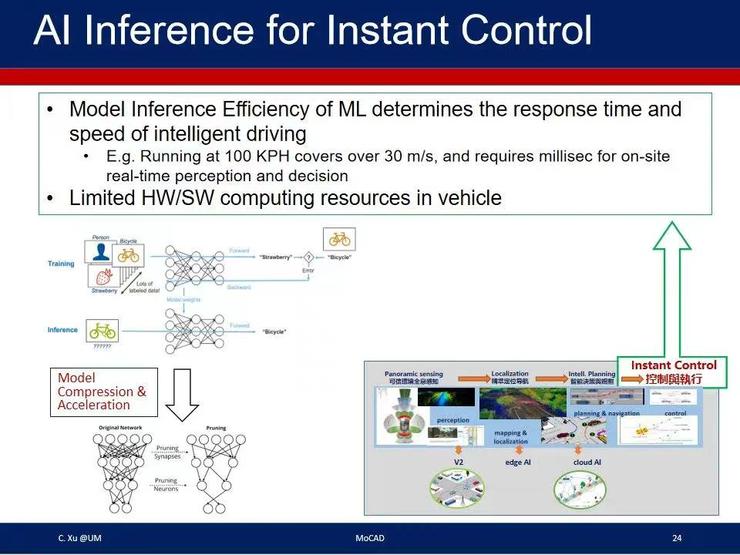
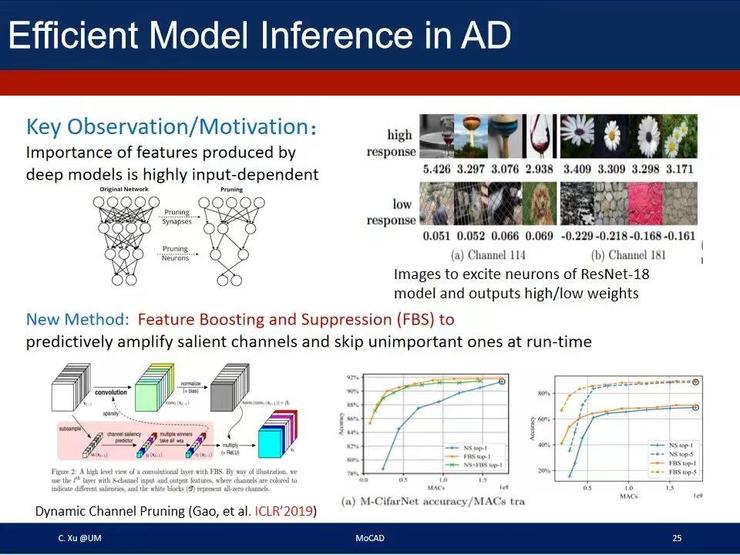
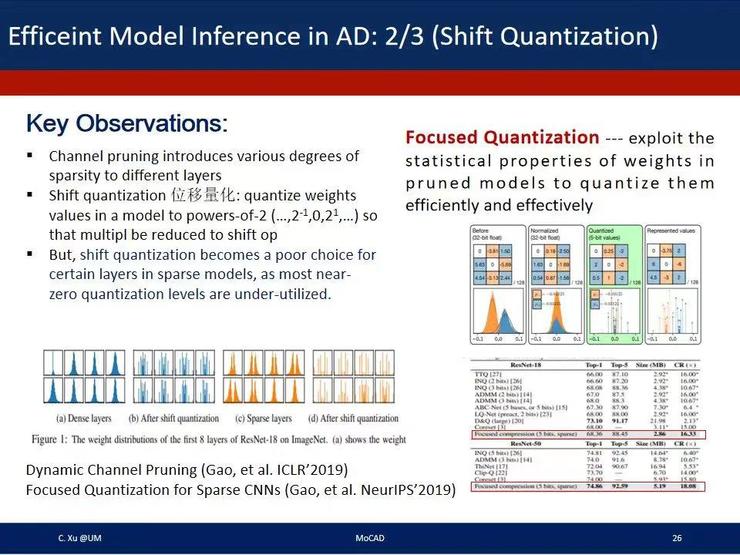
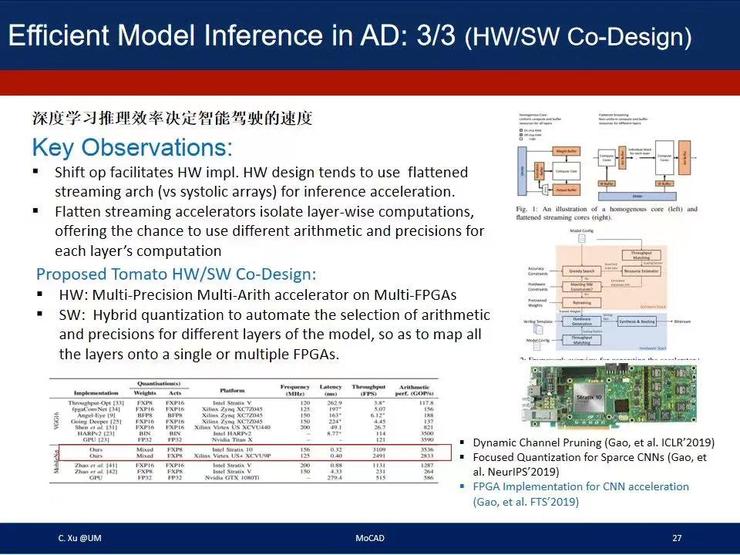
我們怎么在軟硬件計算資源非常有限的情況下做好這樣的工作?模型壓縮,通過模型壓縮降低精度來獲取決策的速度。有關這些問題,我們也總結了一些方法,首先就是把編碼進行壓縮/裁剪,對有用的信息做加權、對無用的信息做裁剪,即 Feature Boosting 方法和硬件實現,論文也發表在人工智能頂尖年會 ICLR’2019和NeurIP’2020上。
我們非常自豪做了許多關于智能駕駛技術的研究,發表了不少相關的論文,也非常希望能夠給這個領域帶來一些影響和啟示。因為時間關系今天就不具體談了。
智能駕駛必將帶來一場深刻的出行革命,基于 AI 技術我們會進一步推動智能駕駛的技術落地。但我們的文化對失敗的包容性不夠,大家做智能駕駛都是謹小慎微,所以我們希望社會對業界積極探索可能帶來的問題能夠有更多的包容。
謝謝大家!



















