為自動駕駛汽車設計的TypeDB數(shù)據(jù)庫
譯文【51CTO.com快譯】據(jù)報道,TNO(荷蘭應用科學研究組織)已著手將諸如:道德、法律、規(guī)范、偏好、以及日常場景的理解等,有關人是如何駕駛的知識,與諸如控制理論、以數(shù)據(jù)驅(qū)動的人工智能(AI)、黑盒算法(DNN)、以及端到端的學習等,適合自動駕駛的技術(shù)融合到一起。
???
其中,為了實現(xiàn)對通用知識(collective knowledge)的合理判斷,他們就用到了TypeDB。
舉例來說,機器是如何及時將編程的邏輯和實際環(huán)境結(jié)合并做出判斷。假設,根據(jù)程序設定,自動駕駛汽車在經(jīng)過學校時應該減速通過。但是,實際上學校現(xiàn)在已經(jīng)關了,這輛車還需要按照程序,減速通過嗎?
此外,當這輛車遇到諸如一堆樹葉等無法識別的東西時,又該怎么辦呢?根據(jù)默認設置,當車輛遇到并不熟悉的事物時,它一定會選擇剎車或停止當前動作。不過,該團隊成員Willeke發(fā)現(xiàn),在未來,他們可以使用TypeDB作為人類和AI的中心知識節(jié)點,以增強車輛對于各種復雜情況的推理能力。
例如,車輛會做出這樣的推理:“我【車輛】雖然不知道這是什么,但我可以推斷出,它既不是道路交通的參與者(traffic participant),又不是容易受傷、或可以移動的物體。目前已是深夜,根據(jù)所處的環(huán)境,我知道周圍并沒有人,也了解自己的行動存在著風險,所以我只需繞過它,便可繼續(xù)前行。”根據(jù)車輛的這段OS,您是否想起了那個著名的OODA循環(huán),即:觀察(Observe)、定位(Orient)、決策(Decide)、行動(Act)。而Willeke的工作重點就包含了觀察與決策步驟的推理過程,并且往往是從態(tài)勢感知(situational awareness)開始的。
態(tài)勢感知
環(huán)境感知
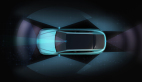
以態(tài)勢感知作為此類認知的核心,通常存在三種輸入:關于汽車領域的基本知識、來自各種采集源的傳感器信息、從其他來源獲取當前環(huán)境的信息(例如環(huán)境地圖等)。這些輸入形式有必要采用汽車領域的模式,其中包括有關基礎設施、交通法規(guī)、交通標志等方面的知識。下面兩張圖分別以可視化的形式,展示了帶有各種數(shù)據(jù)的汽車域模式子集,以及兩個在TypeDB中轉(zhuǎn)換為交通規(guī)則,判定允許車輛通過的例子:
? ??
??
? ??
??
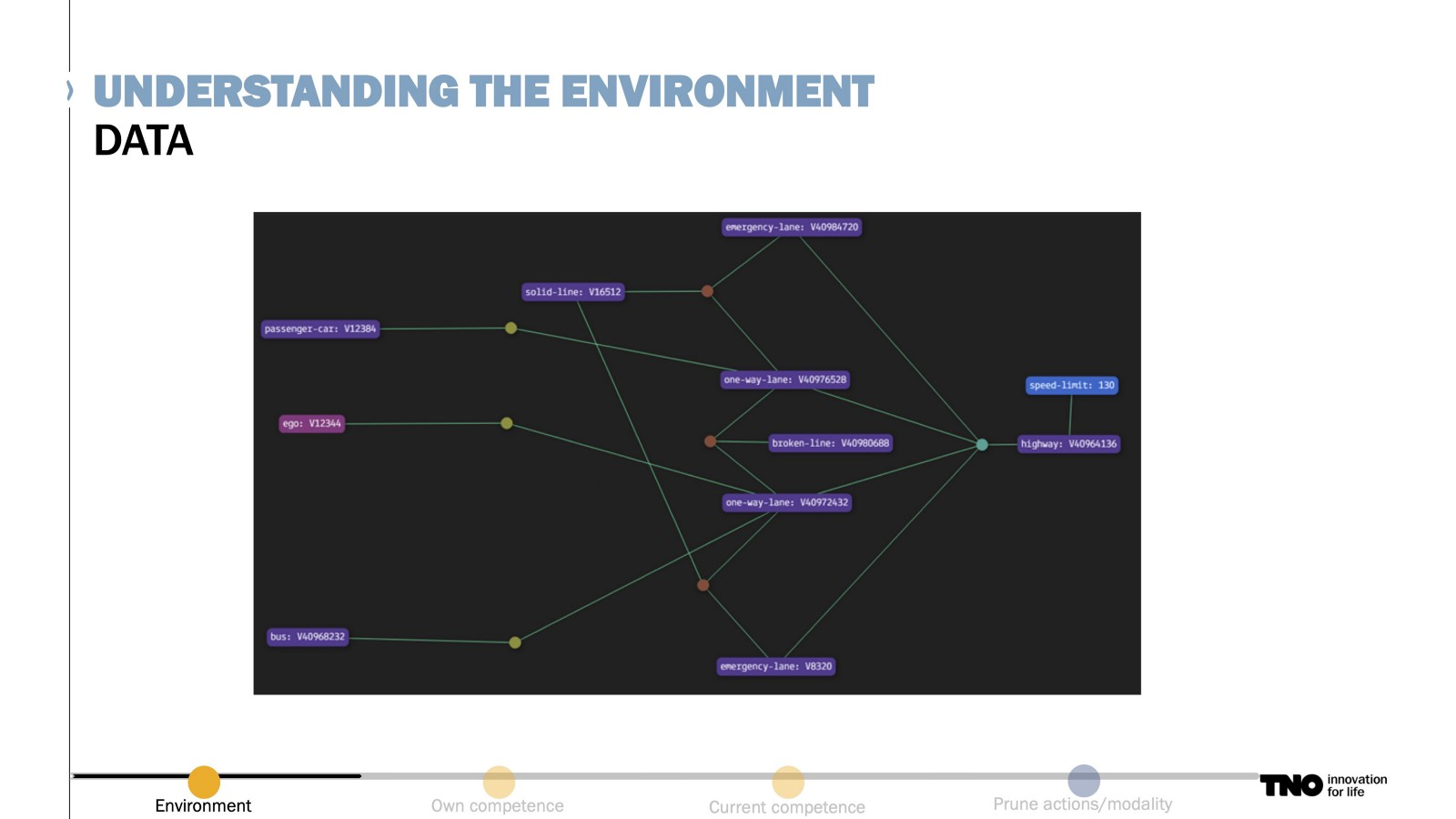
該模式的另外兩個輸入包括來自汽車傳感器的實時反饋,以及來自各種交通預測算法、意圖預測器和POI(如學校等興趣點)等其他資源的感知信息。此類信息可以用于描述車輛所處的當前環(huán)境,進而提高駕駛系統(tǒng)推理規(guī)則了解車輛所處環(huán)境的能力。從下圖中,我們可以看到車載傳感器是如何利用數(shù)據(jù),計算出車輛之間的距離、周圍車輛的速度、以及在車道內(nèi)的具體位置。
? ??
??
TNO團隊正試圖將所有這些信息結(jié)合起來,在知識圖譜中構(gòu)建出各種情境意識。
對車輛自身能力的理解和推理
Willeke詳細地介紹了那些可以用來判斷所處環(huán)境的預測系統(tǒng),以及使用這些預測進行自動駕駛的相關決策。下面,我們來討論在TypeDB中的具體實現(xiàn),以及這些預測算法和數(shù)據(jù)輸入,是如何在自動駕駛中進行建模與應用的。
? ??
??
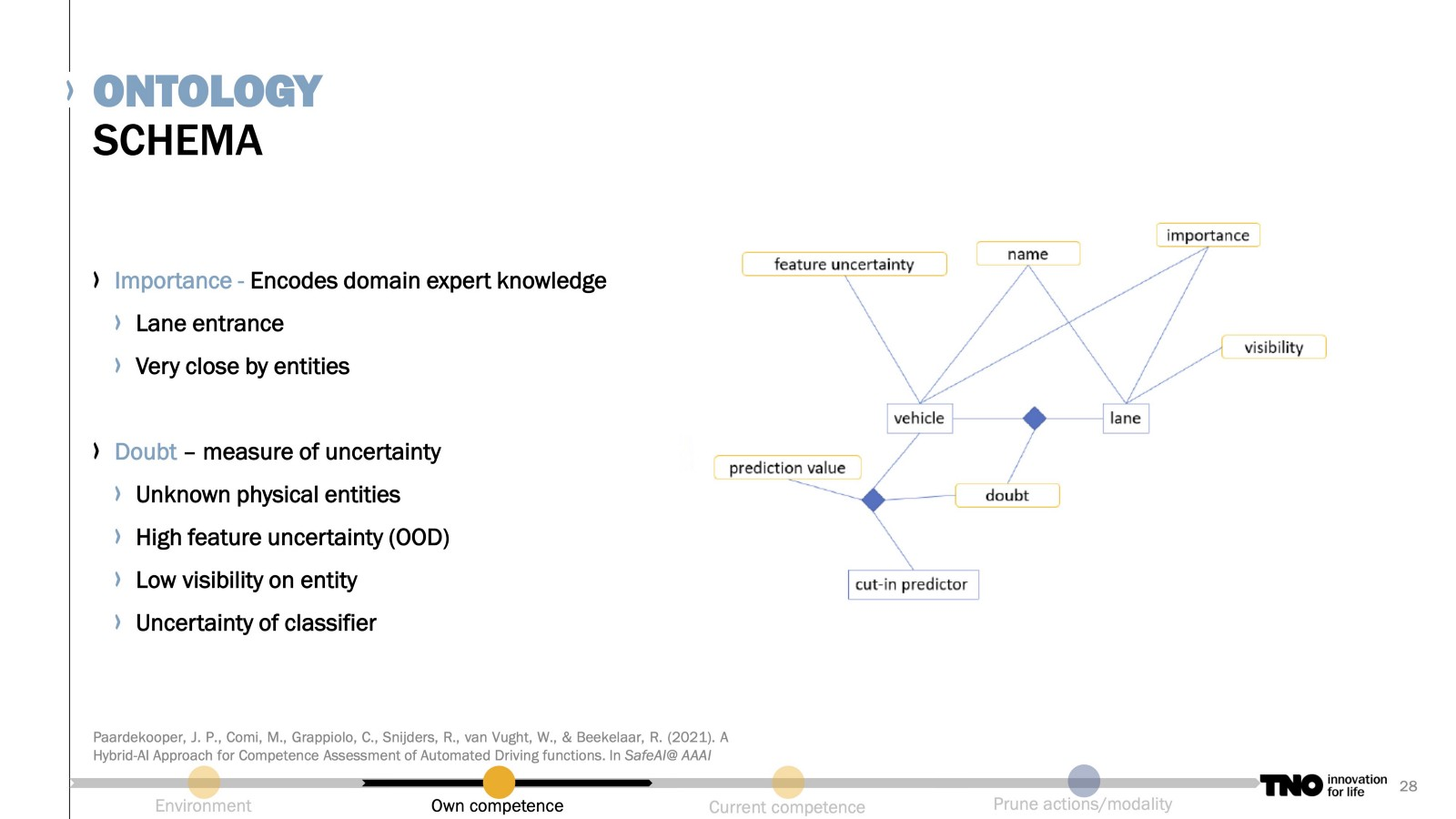
在環(huán)境模型中,TNO在本體模型(ontology)里設定了各種特征不確定性、預測值、重要性(importance)、可見性(visibility)、以及懷疑程度(doubt)等指標,以協(xié)助AI了解車輛所處的情況,進而采取安全有效的行動。
其中,重要性是由領域?qū)<裔槍嚨雷儞Q的相關知識、以及實體(道路上的車輛)之間距離等重要性采取的編碼。懷疑程度是不確定性的度量,其中包括未知的物體、顯著特征不確定性、低可見度、以及分類器的不確定性等維度。在下圖中,我們可以看到這些屬性和實體是如何在TypeDB中通過建模,以便車輛在路上行駛,并在遇到不確定路況時,如何對算法的實時數(shù)據(jù)和輸出進行推理,以便做出下一個判斷的。
? ??
??
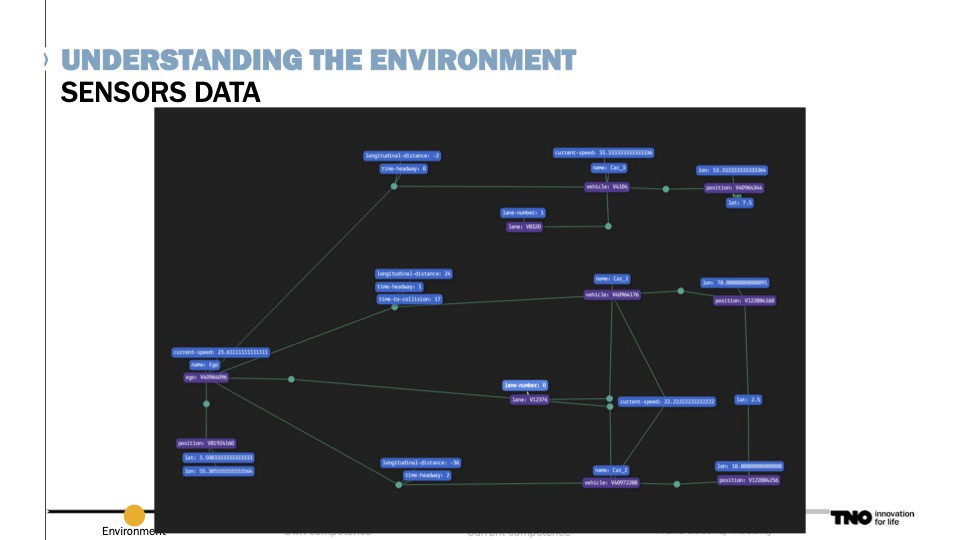
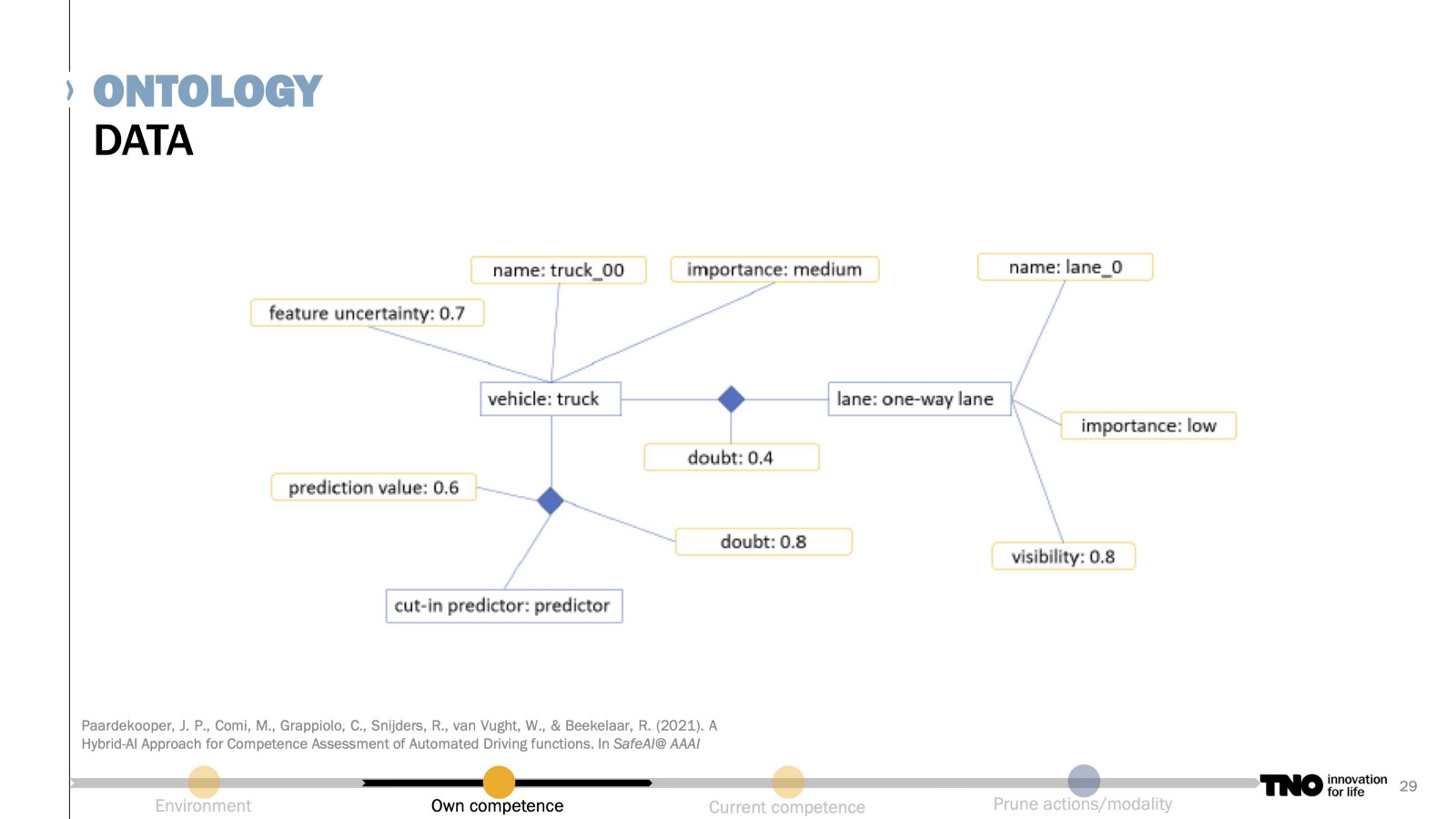
那么如何將上述理論應用到實踐中呢?下圖以數(shù)據(jù)實例化的形式,討論了這樣一個模型場景:您的汽車正在接近一輛卡車,自動駕駛系統(tǒng)需要決定是改變車道并超越卡車,還是直接交給人類司機進行邏輯判斷。
? ??
??
行動指令
動作選擇
系統(tǒng)到底如何判定是超車還是把方向盤交給駕駛員,動作選擇綜合分析了上述TypeDB中的建模、機器學習、以及規(guī)劃器(planner)的信息。對此,我們需要深入了解車輛所執(zhí)行的具體操作、以及為何做出決策與判斷。
在這種類型的決策中,我們希望根據(jù)當前情況采取行動:制動,加速,切換車道,并且我們希望快速做到這一點。
TNO團隊通過從車輛中獲取的傳感器數(shù)據(jù),并使用狀態(tài)和動作信息,對其進行編碼,以完成針對其自研算法的訓練。同時,機器學習算法也會通過逆強化學習(inverse reinforcement learning),為當前給定狀態(tài)的每個動作提供評分。
接著,他們將這些動作及其評分,提供給起到最終決策作用的蒙特卡洛樹搜索(Monte Carlo Tree Search,MCTS)規(guī)劃器。當然,由于MCTS需要創(chuàng)建一個包含了所有可能動作的樹,因此其整體成本比較高。為了降低此類成本,并提高規(guī)劃器的效率,TypeDB再次提供了相關解決方案。
他們使用TypeDB去存儲和推理參與者(即車輛)的動作、周邊信息、以及交通預測等上下文環(huán)境。通過減少那些需要MCTS過濾的可能性操作,他們成功地在實時工作場景中,對搜索樹進行了縮減,提高了決策的制定效率和速度。
最后,他們還通過查詢車輛、動作、法律、以及安全評分三者之間的推斷關系,使用TypeDB的相關規(guī)則,篩選出了各種可能性的動作,并發(fā)送給規(guī)劃器。
小結(jié)與展望
通過上述討論,我們簡要地介紹了一種具有自我感知并結(jié)合了AI的自動駕駛判斷方法。該方法使用汽車周圍的環(huán)境信息,來提高行為推斷的能力。通過構(gòu)建這種態(tài)勢感知的混合方法,車輛可以在真實世界中,面對各種未知的情況,降低自動駕駛的各種潛在風險。
目前,TNO團隊計劃在TypeDB中迭代該模型,希望為上下文環(huán)境添加更多的結(jié)構(gòu),以便能夠使用更高級別的推理規(guī)則,來智能地推理出其他復雜的場景。此外,他們還將不斷地改進評估能力,以增加更多針對車輛的自動化功能,打造更加豐富的動作場景。
譯者介紹
陳峻 (Julian Chen),51CTO社區(qū)編輯,具有十多年的IT項目實施經(jīng)驗,善于對內(nèi)外部資源與風險實施管控,專注傳播網(wǎng)絡與信息安全知識與經(jīng)驗;持續(xù)以博文、專題和譯文等形式,分享前沿技術(shù)與新知;經(jīng)常以線上、線下等方式,開展信息安全類培訓與授課。
原文標題:Using TypeDB for Autonomous Vehicles,作者:Daniel Crowe
【51CTO譯稿,合作站點轉(zhuǎn)載請注明原文譯者和出處為51CTO.com】