













淺析自動(dòng)駕駛4WS車輛路徑跟蹤最優(yōu)控制算法仿真
車輛智能化是汽車行業(yè)新的發(fā)展方向,其中自動(dòng)駕駛是為了實(shí)現(xiàn)高度智能化的交通系統(tǒng)。對于自動(dòng)駕駛車輛,為了增加其主動(dòng)安全性,越來越多的車輛采用四輪轉(zhuǎn)向系統(tǒng),所以在轉(zhuǎn)向時(shí)對規(guī)劃路徑進(jìn)行精確跟蹤與四輪的協(xié)同控制是自動(dòng)駕駛領(lǐng)域亟待解決的新的問題
對于有四輪轉(zhuǎn)向(4WS)功能的自動(dòng)駕駛特種車輛和高級乘用車,傳統(tǒng)的控制方法如預(yù)瞄-跟蹤模型、前饋反饋控制等只是基于系統(tǒng)運(yùn)動(dòng)學(xué)模型,很少建立精確的車輛動(dòng)力學(xué)模型,也沒有考慮車輛在高速工況下的動(dòng)力學(xué)非線性約束條件。即使有些控制方法考慮了車輛模型,但大多是基于輪胎小角度假設(shè)建立的,當(dāng)高速工況下輪胎側(cè)偏角較大輪胎進(jìn)入非線性區(qū)域時(shí)這種控制方法就會(huì)喪失穩(wěn)定性,難以實(shí)現(xiàn)精確的路徑跟蹤效果
基于以上自動(dòng)駕駛4WS車輛的控制難題,本文將基于車輛動(dòng)力學(xué)模型設(shè)計(jì)線性時(shí)變模型預(yù)測算法,利用其滾動(dòng)優(yōu)化和反饋校正的特性,來減小路徑跟蹤過程中的誤差。另外,基于實(shí)際的輪胎側(cè)偏特性,構(gòu)造了權(quán)系數(shù)線性最優(yōu)二次型算法對后輪轉(zhuǎn)角進(jìn)行控制,從而滿足4WS自動(dòng)駕駛車輛 的高速下路徑跟蹤過程中的平順性和操縱穩(wěn)定性需求,對模型預(yù)測算法和最優(yōu)控制理論應(yīng)用在自動(dòng)駕駛運(yùn)動(dòng)規(guī)劃領(lǐng)域 提供重要的使用價(jià)值和理論研究意義。
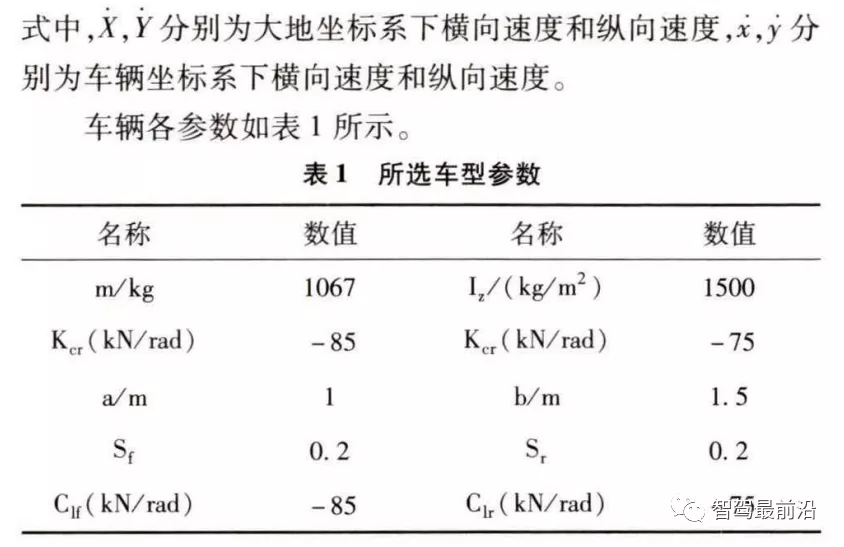
車輛側(cè)向動(dòng)力學(xué)建模
汽車四輪轉(zhuǎn)向系統(tǒng)的穩(wěn)定性主要取決于側(cè)傾和橫擺兩個(gè)方向的運(yùn)動(dòng)。本文研究目標(biāo)是車輛快速穩(wěn)定地進(jìn)行路徑跟蹤,屬于車輛操縱穩(wěn)定性問題,因此在建模時(shí)不考慮車輛的側(cè)傾運(yùn)動(dòng),建立車輛模型如圖1所示。
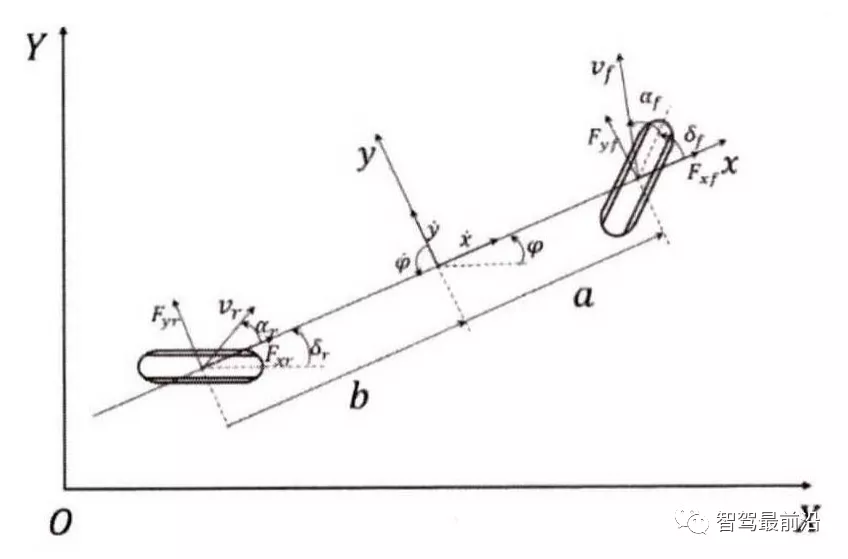
圖1 車輛單軌模型
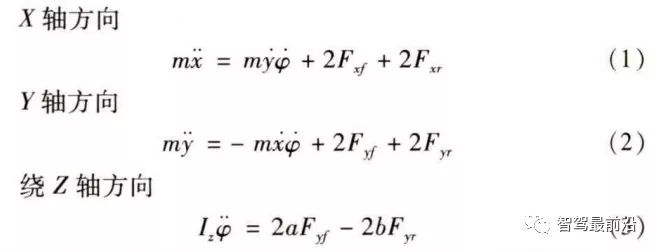
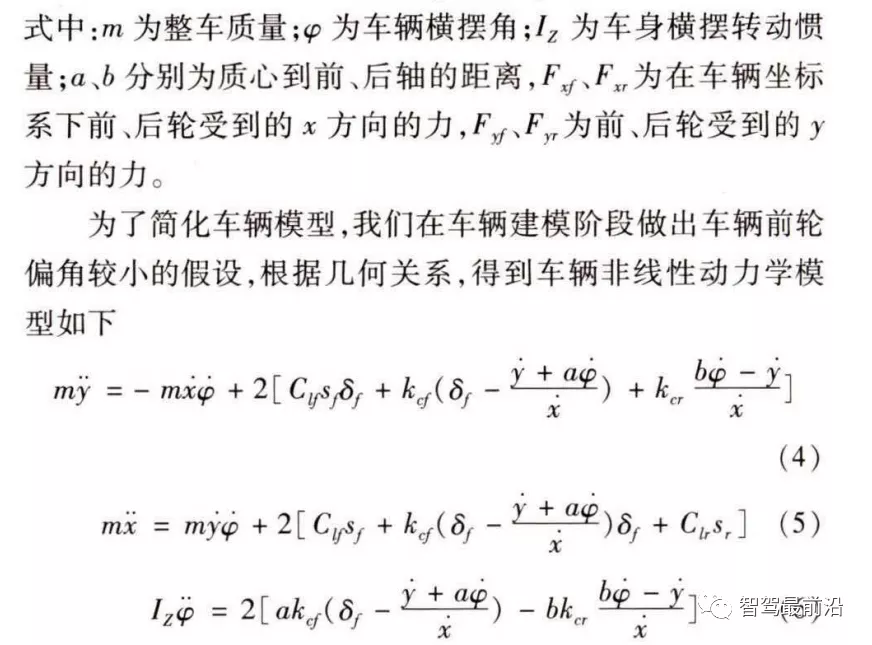
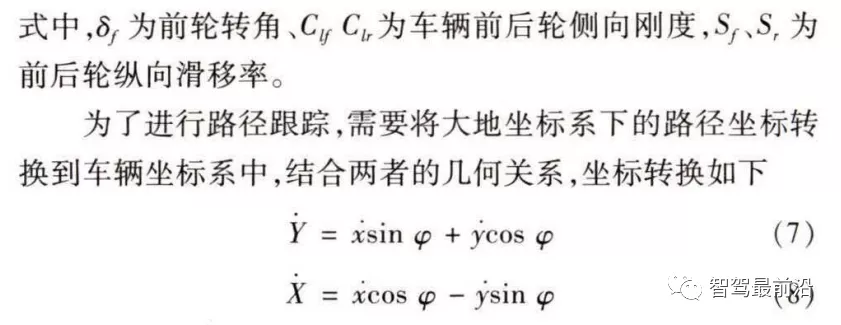
在圖1中,坐標(biāo)系。秒Z為車輛坐標(biāo)系,坐標(biāo)系OXY為大地坐標(biāo)系。假設(shè)車輛模型為單軌模型,即只考慮車輛橫向、縱向和橫擺運(yùn)動(dòng),經(jīng)過受力分析,四輪轉(zhuǎn)向模型如下:
模型預(yù)測控制算法設(shè)計(jì)
模型預(yù)測的機(jī)理可以描述為:在每一個(gè)采樣時(shí)刻,根據(jù)獲得的當(dāng)前測量信息,在線求解一個(gè)有限時(shí)域開環(huán)優(yōu)化問題 ,并將得到的控制序列的第一個(gè)元素作為被控對象,在下一個(gè)采樣時(shí)刻,重復(fù)上述過程,用新的測量值刷新優(yōu)化問題并重新求解。故將此算法分為三部分進(jìn)行設(shè)計(jì)。
預(yù)測方程建立
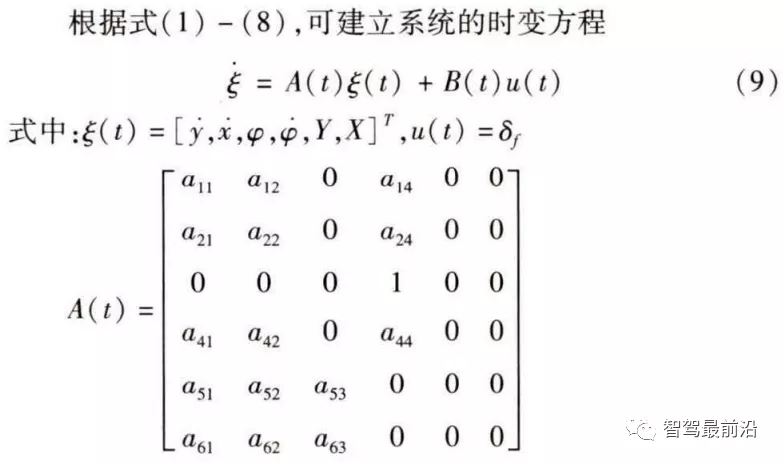
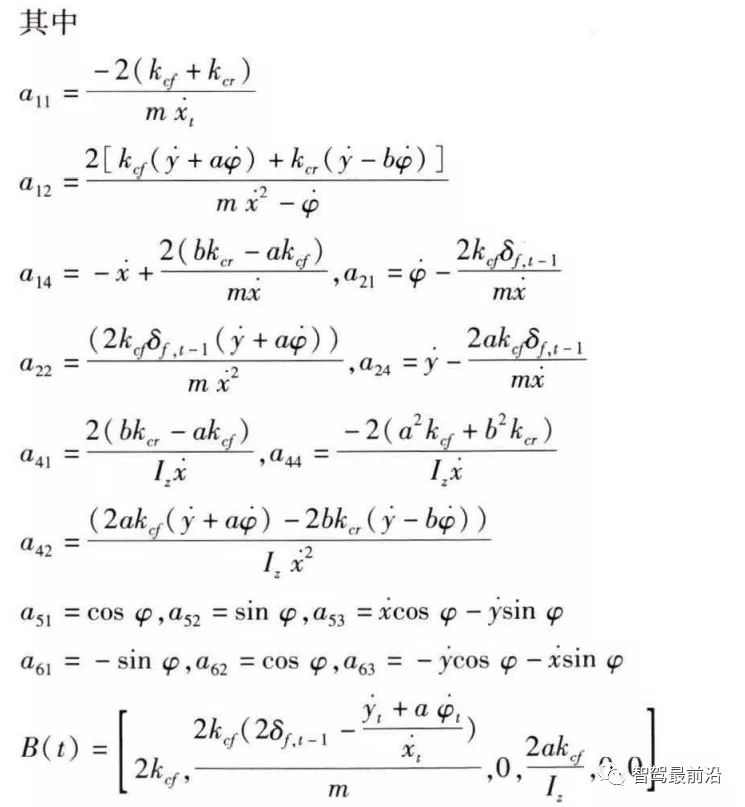
由(9)式可看出,本文所建立的車輛動(dòng)力學(xué)模型是非線性的,對于復(fù)雜系統(tǒng)來說,非線性模型的在線求解難度比較大,很難滿足自動(dòng)駕駛車輛控制實(shí)時(shí)性的要求。為了計(jì)算簡便 ,需要對此模型進(jìn)行線性化近似。
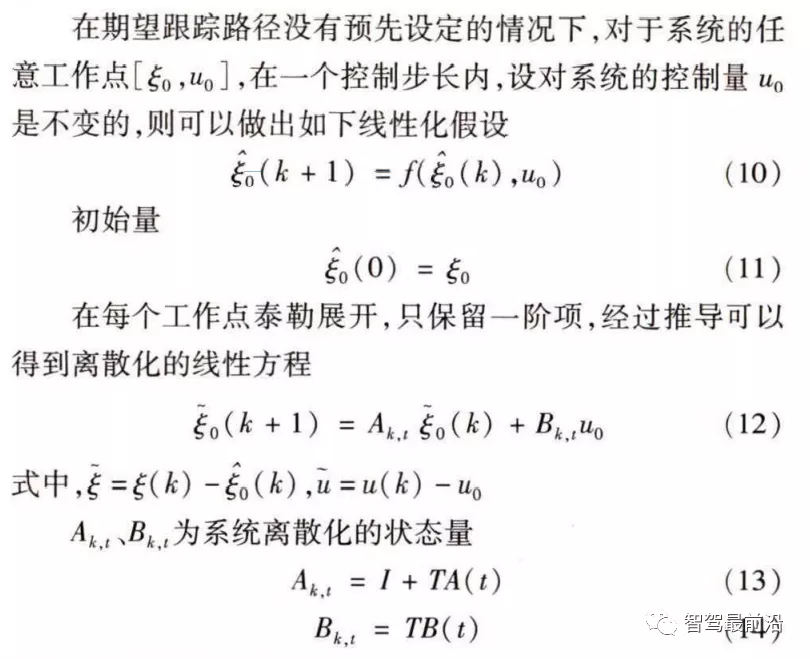
模型預(yù)測方程求解
在自動(dòng)駕駛車輛高速行駛過程中,往往會(huì)發(fā)生控制量突變的情況,使MPC控制量發(fā)散從而造成跟蹤軌跡完全偏離目標(biāo)軌跡,為了防止出現(xiàn)此現(xiàn)象在目標(biāo)函數(shù)中加人松弛系數(shù)進(jìn)行控制量軟約束,故采用如下形式設(shè)計(jì)模型預(yù)測控制器的目標(biāo)函數(shù)。
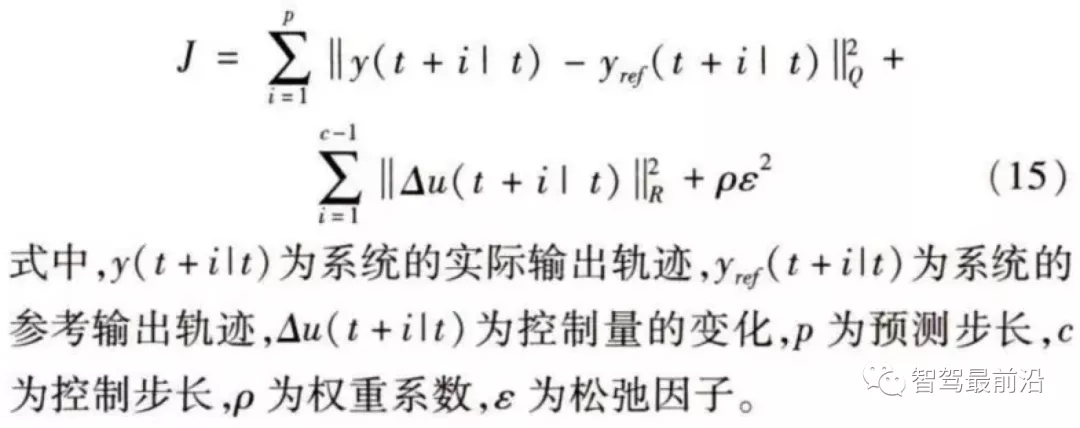
上式中的第一項(xiàng)反映了車輛對目標(biāo)路線的跟蹤效果,第二項(xiàng)反映了對誤差的控制效果,第三項(xiàng)為加人的松弛系數(shù),以調(diào)整約束范圍,解決在硬性約束下該方程無法得到最優(yōu)解的問題。

控制反饋機(jī)制
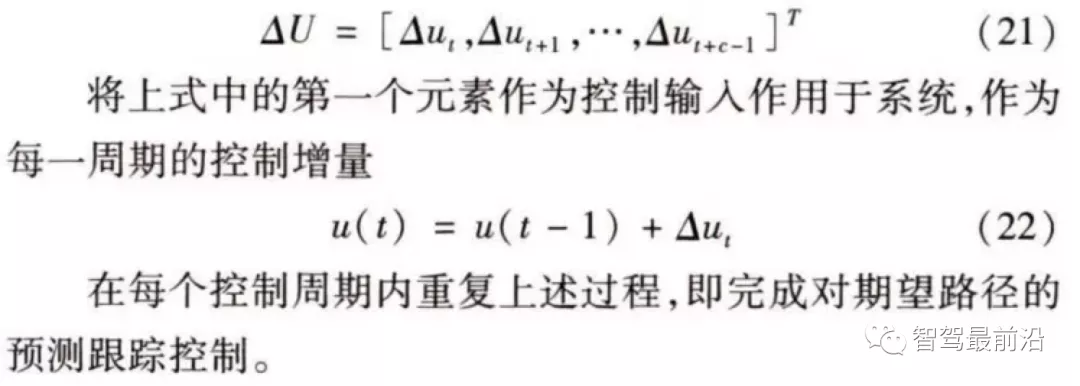
結(jié)合以上約束,將目標(biāo)函數(shù)轉(zhuǎn)化為矩陣二次型形式,利用內(nèi)點(diǎn)法求解最優(yōu)化問題,這樣就可得到預(yù)測步長內(nèi)的控制 (12) (13) (14) 序列的輸人增量
權(quán)系數(shù)LQR后輪轉(zhuǎn)角控制算法設(shè)計(jì)
權(quán)系數(shù)車輛狀態(tài)方程
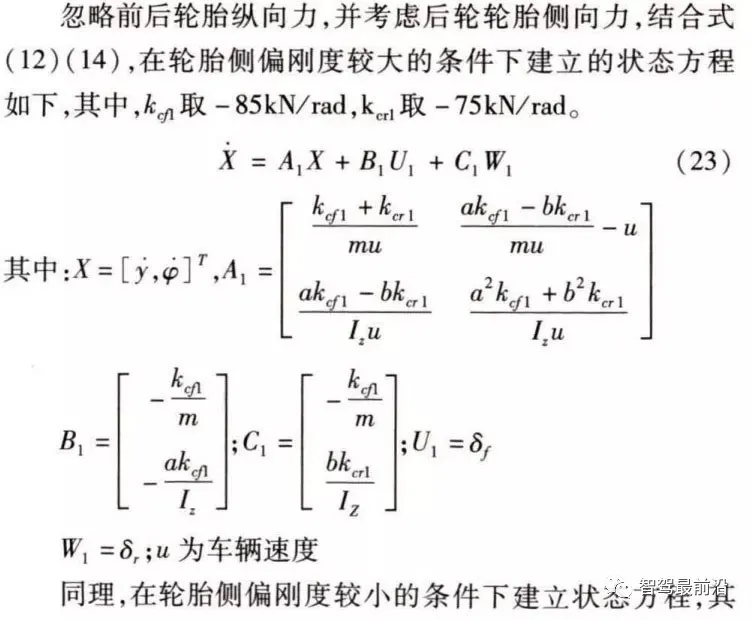
前文在前輪輪胎小側(cè)偏角假設(shè)下建立了車輛模型,而在四輪自動(dòng)駕駛車輛的實(shí)際運(yùn)行過程中,在極限工況下輪胎側(cè)偏角會(huì)超出線性假設(shè)的范圍,這會(huì)導(dǎo)致原有的車輛運(yùn)動(dòng)學(xué)模 型不準(zhǔn)確從而影響路徑跟蹤精度。由圖2可以看出,當(dāng)輪胎側(cè)偏角小于0.15rad時(shí),側(cè)偏角與側(cè)向力成線性關(guān)系且側(cè)偏剛度較大。當(dāng)側(cè)偏角大于0.15rad時(shí),側(cè)偏角與側(cè)向力成線 性關(guān)系且側(cè)偏剛度較小。
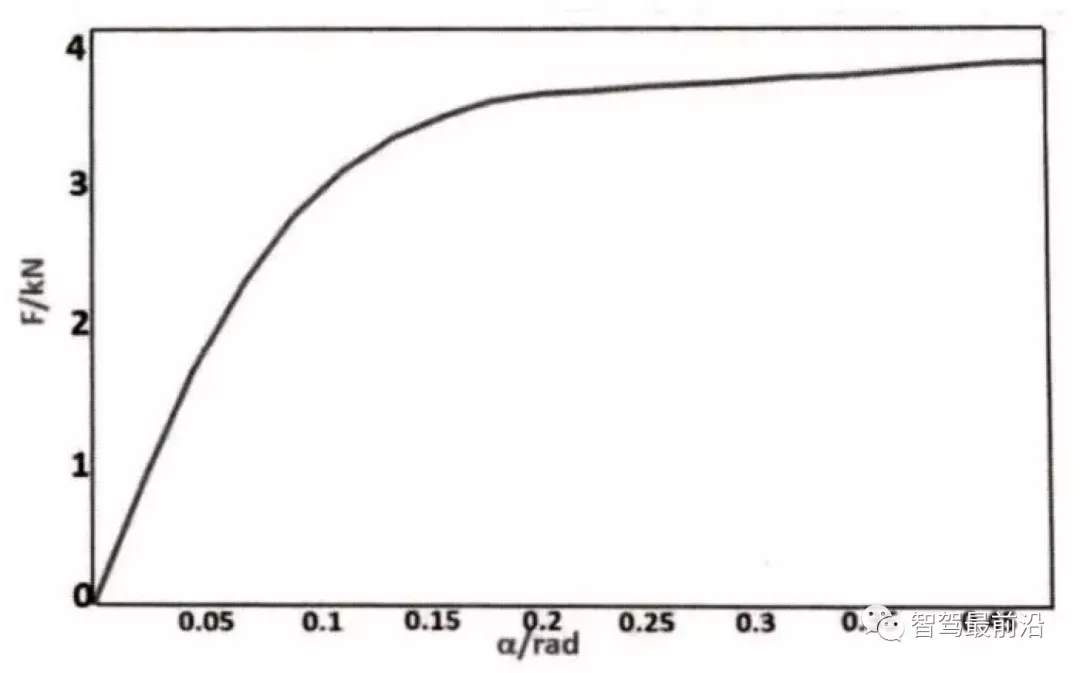
圖2 輪胎側(cè)偏特性
為了使控制區(qū)域能夠覆蓋所有輪胎側(cè)偏角。根據(jù)這兩個(gè)區(qū)域的線性特性分別建立兩個(gè)不同參數(shù)的二自由度車輛方程,并基于這兩個(gè)方程設(shè)計(jì)權(quán)系數(shù)后輪最優(yōu)控制算法。

線性二次型最優(yōu)控制算法設(shè)計(jì)
LQR算法通過狀態(tài)量與理想狀態(tài)量之間的誤差來構(gòu)造評價(jià)函數(shù),通過求解該評價(jià)函數(shù)來得到最優(yōu)控制規(guī)律,也就是最優(yōu)的后輪輸出轉(zhuǎn)角。
仿真結(jié)果
綜上所述,整個(gè)算法流程如圖3所示。
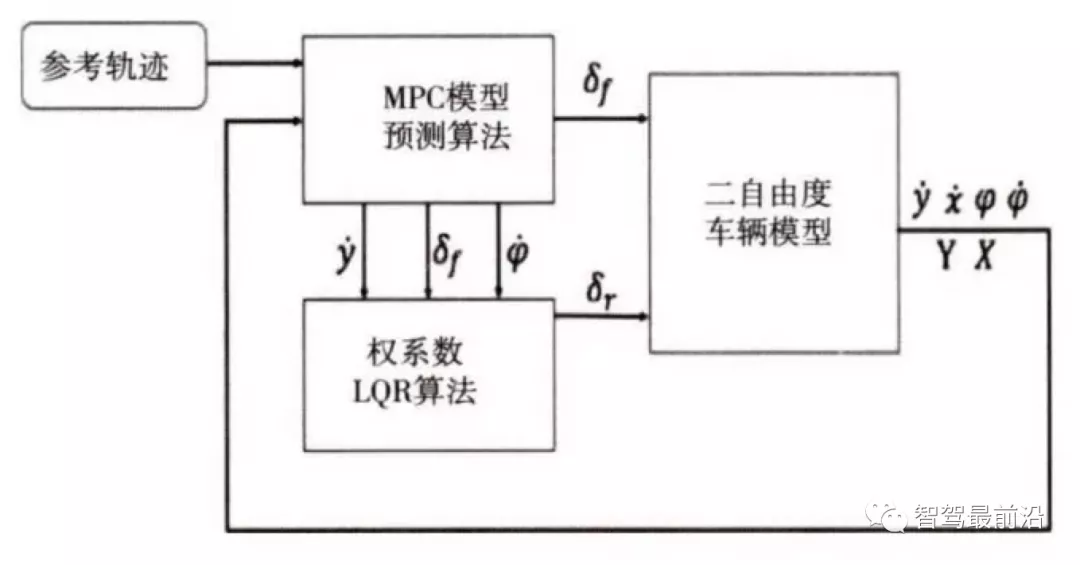
圖3 算法聯(lián)合仿真流程圖
將參考軌跡輸入到模型預(yù)測算法中,基于車輛狀態(tài)構(gòu)建目標(biāo)函數(shù),解算目標(biāo)函數(shù)后,由“預(yù)測-跟蹤 ”的流程輸出每一步的最優(yōu)前輪轉(zhuǎn)角控制量。然后將前輪轉(zhuǎn)角、y 軸速度和橫擺角速度輸入到權(quán)系數(shù)LQR算法中得到最優(yōu)的后輪轉(zhuǎn)向角,將得到的前、后輪轉(zhuǎn)角一同輸入到二自由度車輛模型中得到車輛狀態(tài)反饋量,從而形成路徑跟蹤閉環(huán)控制。
為了驗(yàn)證算法效果,采用雙移線工況進(jìn)行路徑跟蹤仿真,路面附著系數(shù)μ取 0.8,模型預(yù)測的預(yù)測周期取 0.05,預(yù)測步長取 20,控制步長取 5,松弛因子取 10,權(quán)重系數(shù)取 1000。
分別在 30km/h 、60km/h 、110km/h 車速下進(jìn)行仿真,路徑跟蹤效果如圖所示,從圖中可以看出,在 60km/h 以內(nèi)的路 徑跟蹤效果基本沒有變化,對速度的魯棒性很好,而在高車速 110km/h 工況下,在轉(zhuǎn)彎處跟蹤路徑出現(xiàn)了些許波動(dòng),出現(xiàn)此現(xiàn)象的原因是模型線性化的累積誤差,使預(yù)測路徑偏離。綜合三種工況下的仿真結(jié)果可以得出此算法的路徑跟蹤效果良好,且對速度有較強(qiáng)的魯棒性。
結(jié)合圖 5-7 , 可以看到車輛在不同工況下的動(dòng)態(tài)響應(yīng),隨著車速增大,控制增量也在增大,但始終保持在約束范圍內(nèi),滿足高速下自動(dòng)駕駛車輛操縱穩(wěn)定性的要求。
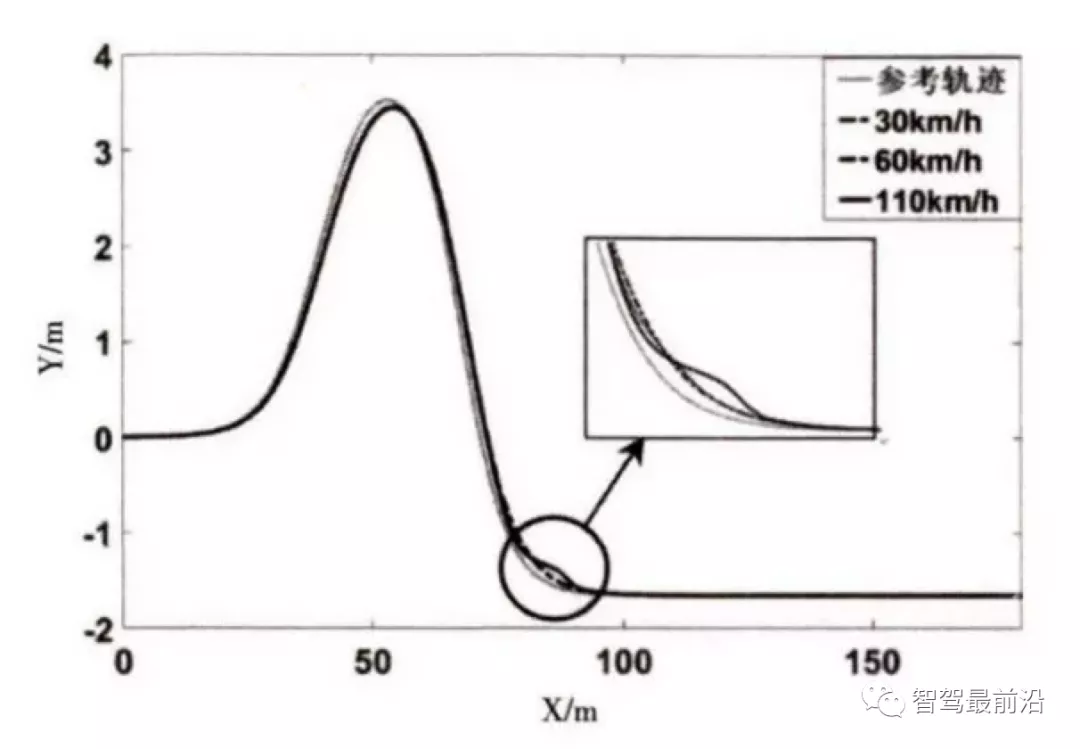
圖4 路徑跟蹤仿真效果圖
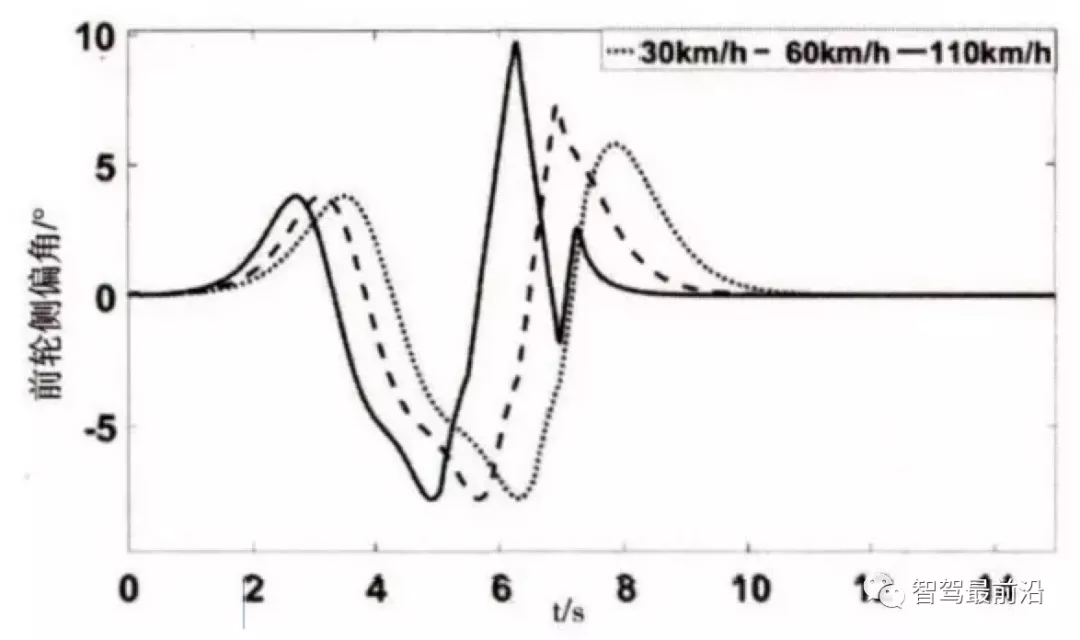
圖5 前輪側(cè)偏角隨時(shí)間變化圖
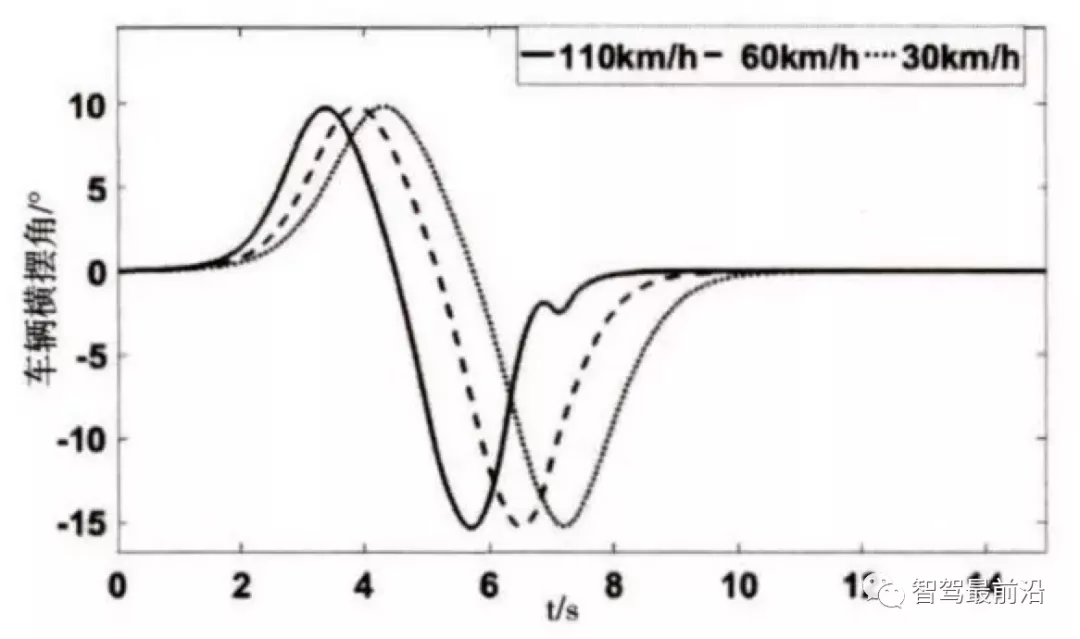
圖6 車輛橫擺角隨時(shí)間變化圖
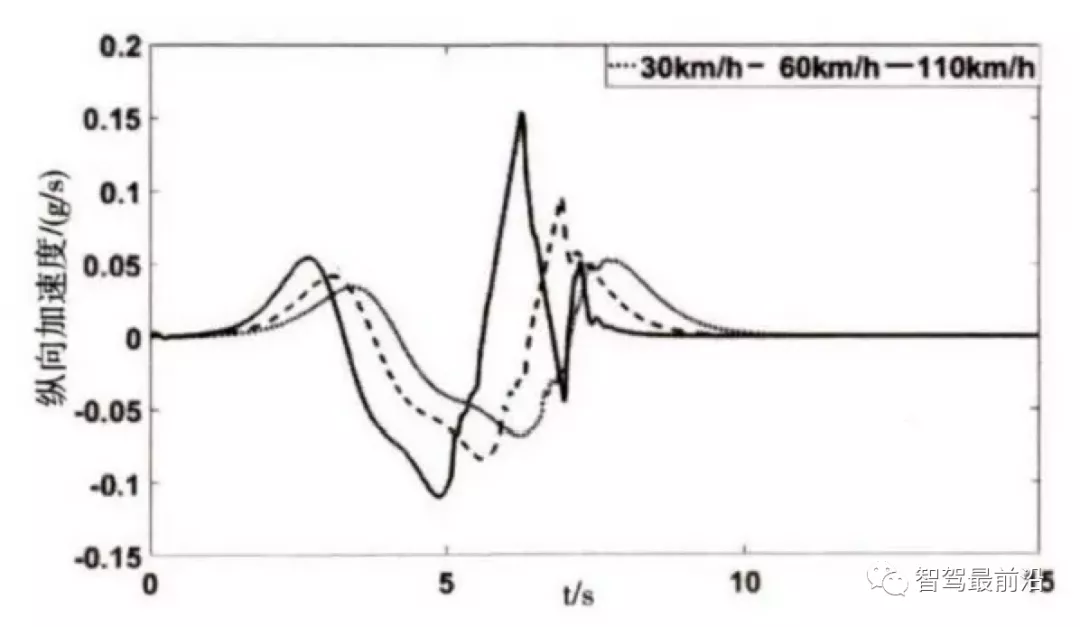
圖7 縱向加速度隨時(shí)間變化圖
由圖8中可以看出,考慮非線性輪胎側(cè)偏特性的權(quán)系數(shù) LQR后輪轉(zhuǎn)角控制方法比基于線性特性設(shè)計(jì)的LQR方法橫擺角速度更小。另外,在6s處車輛進(jìn)行U型彎路徑跟蹤時(shí),線性的LQR控制方法橫擺角速度達(dá)到 5.5deg/s,這會(huì)增加車輛的駕駛難度,而權(quán)系數(shù)LQR方法將橫擺角速度減小到了 5deg/s以下,有效地提高了四輪轉(zhuǎn)向車輛路徑跟蹤時(shí)的操縱穩(wěn)定性。
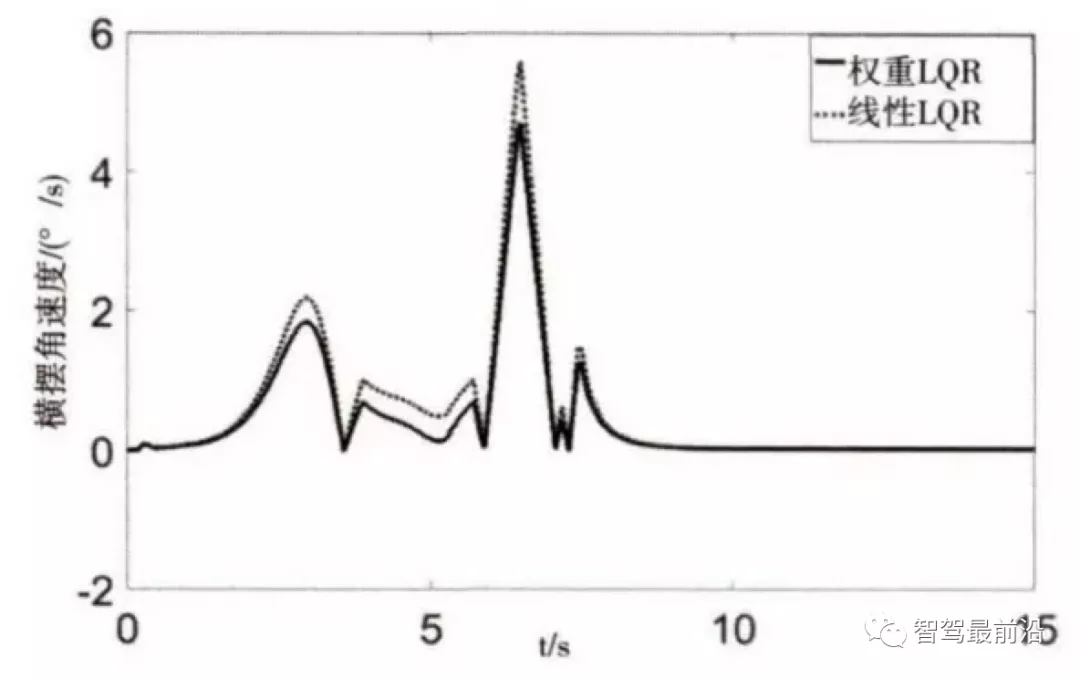
圖8 110km/h 車速下車輛橫擺角速度變化圖
本文所設(shè)計(jì)的模型預(yù)測控制算法對非線性車輛模型做了離散線性化處理,在每個(gè)控制步長內(nèi)進(jìn)行滾動(dòng)優(yōu)化,基于與參考軌跡的誤差輸出最優(yōu)的前輪轉(zhuǎn)角權(quán)系數(shù)LQR后輪轉(zhuǎn)向控制算法基于前輪轉(zhuǎn)角輸入,考慮大側(cè)偏角下輪胎的側(cè)偏特性,設(shè)計(jì)權(quán)函數(shù)來對其進(jìn)行線性擬合,輸出最優(yōu)的后輪轉(zhuǎn)角。經(jīng)過聯(lián)合仿真表明,此路徑跟蹤算法誤差最大為 0.34m (110km/h),考慮車輛建模的精度,該誤差在合理的范圍內(nèi)。相較于傳統(tǒng)的反饋控制,對車輛橫擺角、縱向加速度等車輛操縱穩(wěn)定性參數(shù)有較好的控制效果,并且對車速有很好的魯棒性。權(quán)系數(shù)LQR算法相較于線性LQR算法在 110km/h 工況下對橫擺角速度的控制效果提升了15%。因此,本文設(shè)計(jì)的算法可以滿足自動(dòng)駕駛4WS車輛高速循跡性能要求。

























