一文解析自動駕駛汽車決策控制系統技術
?自動駕駛系統是一個集環境感知、決策控制和動作執行等功能于一體的綜合系統,是充分考慮車輛與交通環境協調規劃的系統,也是未來智能交通系統的重要組成部分。本文著重分析自動駕駛決策控制的相關技術,探索未來的發展方向。
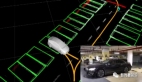
自動駕駛系統簡介通常意義上,自動駕駛系統可以分為感知層、決策層、執行層。
感知層
感知層被定義為環境信息和車內信息的采集與處理,涉及道路邊界檢測、車輛檢測、行人檢測等多項技術,可認為是一種先進的傳感器技術,所采用的傳感器包括激光雷達、攝像頭、毫米波雷達、超聲波雷達、速度和加速度傳感器等。由于單一傳感器存在感知的局限性,并不能滿足各種工況下的精確感知,自動駕駛汽車要實現在各種環境下平穩運行,需要運用多傳感器融合技術,該技術也是感知層的關鍵技術。
決策層
決策層可以理解為依據感知信息來進行決策判斷,確定適當工作模型,制定相應控制策略,替代人類駕駛員做出駕駛決策。這部分的功能類似于給自動駕駛汽車下達相應的任務。例如在車道保持、車道偏離預警、車距保持、障礙物警告等系統中,需要預測本車及相遇的其他車輛、車道、行人等在未來一段時間內的狀態。先進的決策理論包括模糊推理、強化學習、神經網絡和貝葉斯網絡技術等。由于人類駕駛過程中所面臨的路況與場景多種多樣,且不同人對不同情況所做出的駕駛策略應對也有所不同,因此類人的駕駛決策算法的優化需要非常完善高效的人工智能模型以及大量的有效數據。這些數據需要盡可能地覆蓋到各種罕見的路況,而這也是駕駛決策發展的最大瓶頸所在。
執行層
執行層是指系統在做出決策后,按照決策結果對車輛進行控制。車輛的各個操控系統都需要能夠通過總線與決策系統相連接,并能夠按照決策系統發出的總線指令精確地控制加速程度、制動程度、轉向幅度、燈光控制等駕駛動作,以實現車輛的自主駕駛。
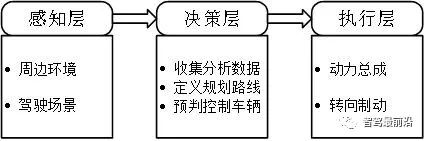
圖1 自動駕駛系統簡介
決策控制系統介紹
傳統意義上自動駕駛系統的決策控制軟件系統包含環境預測、行為決策、動作規劃、路徑規劃等功能模塊。
環境預測模塊
環境預測模塊作為決策規劃控制模塊的直接數據上游之一,其主要作用是對感知層所識別到的物體進行行為預測,并且將預測的結果轉化為時間空間維度的軌跡傳遞給后續模塊。通常感知層所輸出的物體信息包括位置、速度、方向等物理屬性。
利用這些輸出的物理屬性,可以對物體做出“瞬時預測”。環境預測模塊不局限于結合物理規律對物體做出預測,而是可結合物體和周邊環境以及積累的歷史數據信息,對感知到的物體做出更為“宏觀”的行為預測。例如在圖2中,通過識別行人在人行道的歷史行進動作預測出行人可能會在人行道上穿越路口,而通過車輛的歷史行進軌跡可判斷其會在路口右轉。
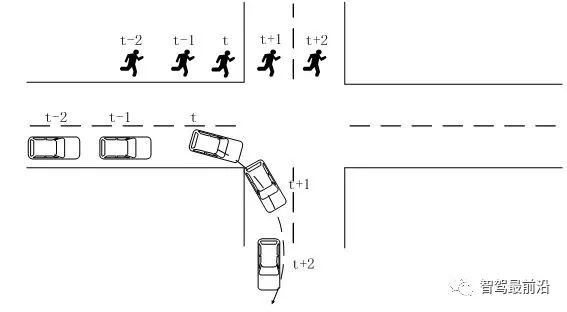
圖2 環境預測示意圖
行為決策模塊
行為決策模塊在整個自動駕駛決策規劃控制軟件系統中扮演著“副駕駛”的角色。這個層面匯集了所有重要的車輛周邊信息,不僅包括了自動駕駛汽車本身的實時位置、速度、方向,還包括車輛周邊一定距離以內所有的相關障礙物信息以及預測的軌跡。行為決策層需要解決的問題,就是在知曉這些信息的基礎上,決定自動駕駛汽車的行駛策略。
由于需要考慮多種不同類型的信息,行為決策問題往往很難用單一的數學模型來求解,而是要利用一些軟件工程的先進理念來設計規則引擎系統。例如在DARPA挑戰賽中,Stanford的無人車系統利用一系列cost設計和有限狀態機來設計無人車的軌跡和操控指令。現階段馬爾可夫決策過程的模型也開始被越來越多的應用于自動駕駛系統行為層面的決策算法實現當中。簡而言之,行為決策層面需要結合環境預測模塊的結果,輸出宏觀的決策指令供后續的規劃模塊去更具體地執行。
動作規劃模塊
自動駕駛汽車規劃模塊包括動作規劃和路徑規劃兩部分。動作規劃模塊主要是對短期甚至是瞬時的動作進行規劃,例如轉彎、避障、超車等動作;而路徑規劃模塊是對較長時間內車輛行駛路徑的規劃,例如從出發地到目的地之間的路線設計或選擇。
自動駕駛系統的設計思路是建立若干個行駛狀態,通過不同的條件觸發行駛狀態切換。這種設計思路存在切換過程平順性較差問題。在實際的系統設計過程中主要采用將道路中的真實目標和非真實目標都描述成虛擬質點的方法來強化車輛行駛的平順性。其中,真實目標主要是指車輛、行人等因素;非真實目標包括限速、紅燈、停車點、道路曲率、天氣條件等。基于虛擬質點模型方法的優勢在于將算法模型統一,有效避免了傳統控制算法中因目標或控制模式切換產生的車輛加減速度跳變的問題。
路徑規劃模塊
自動駕駛汽車路徑規劃模塊是指在一定的環境模型基礎上,給定自動駕駛汽車起始點和目標點后,按照性能指標規劃出一條無碰撞、能安全到達目標點的有效路徑。路徑規劃主要包含兩個步驟:建立包含障礙區域與自由區域的環境地圖,以及在環境地圖中選擇合適的路徑搜索算法,快速實時地搜索可行駛路徑。路徑規劃結果對車輛行駛起著導航作用,它引導車輛從當前位置行駛到達目標位置。環境地圖表示方法主要分為度量地圖表示法、拓撲地圖表示法等。
發展趨勢
人工智能機器學習、深度神經網絡以及聯網通訊等技術的發展,進一步豐富了自動駕駛汽車發展的技術路徑,也促進了自動駕駛技術由單一的樣機演示向具備一定落地應用能力并可實現自主定位的典型交通場景的方向發展。
人工智能
人工智能是研究、開發用于模擬、延伸和擴展人的智能的理論、方法、技術及應用系統的一門新的技術科學。它意在探索智能的實質,并生產出一種新的能以人類智能相似的方式做出反應的智能機器。其一大重要的應用領域就是自動駕駛,主要目標是使自動駕駛汽車具備一定的自主學習能力,并能對簡單交通環境形成記憶性認知,現階段人工智能技術在自動駕駛汽車領域的主要應用體現在以下幾個方面。
1、實現對環境物體的識別與認知
利用多目視覺、激光雷達、毫米波雷達等傳感器件及識別算法,可以實現對實際道路環境中多曲面物體的準確識別。同時融入深度學習技術后,可對各物體三維空間尺寸及特征信息形成迭代分類,從而使自動駕駛汽車具有對多種類環境物體的識別與認知能力。
2、實現對可行駛區域的檢測
利用基于先進傳感器的地圖采集技術可以提取道路的詳細標注(標志、標線、信號燈等)和高精度位置(經度、緯度、高度等)等信息,從而實現自動駕駛汽車對道路平面特征的提取,同時基于深度學習可實現對道路可行駛、不可行駛區域的認知識別。
3、實現行駛路徑的規劃與決策
決策規劃處理是人工智能技術在自動駕駛中的另一個重要應用場景。現階段主流的人工智能方法包括狀態機、決策樹、貝葉斯網絡等。伴隨著深度學習與增強學習技術的發展,現已實現了對復雜工況的決策并能進行在線優化學習。由于在實際道路中影響駕駛路徑規劃的因素非常多,勢必會占用較多的計算資源。為提高計算效率,日本研究學者提出了“安全場”的研究思路,即形成典型交通場景作為深度學習神經網絡的輸入,以提高自動駕駛汽車的決策效率,提升路徑規劃能力。
圖3 基于機器學習的非結構化道路檢測框架
智能網聯
結合通訊技術的發展,運用車與車、車與路、車與人、車與云之間的實時通訊技術,可為人工智能技術在自動駕駛技術應用過程中的數據、計算與算法等三大要素提供進一步支持,還可面向多車型、多場景智能駕駛需求,提供解決群體智能駕駛系統協同駕駛所面臨的問題。基于智能網聯的車云協同自動駕駛系統的具體架構如下圖4所示。
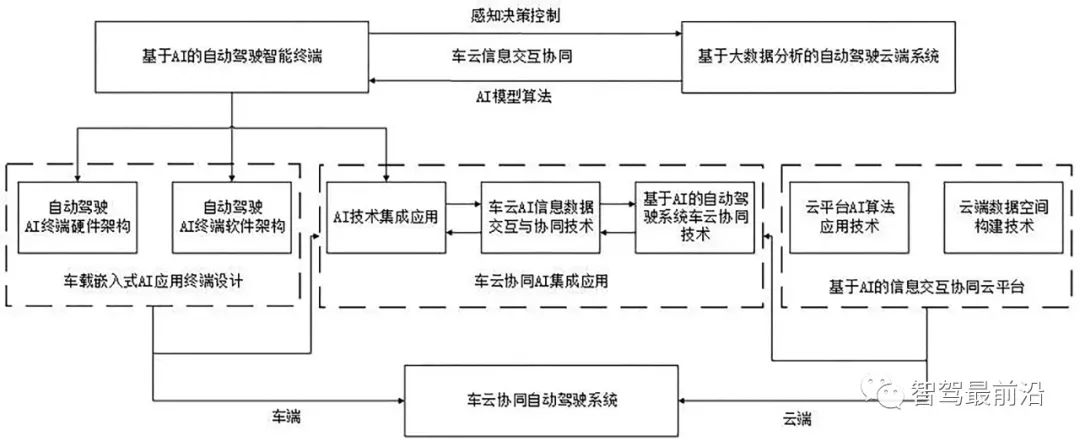
圖4 基于人工智能的車云協同自動駕駛系統構建方案示意圖
該架構方案分為基于AI的自動駕駛智能終端和基于大數據分析的自動駕駛云端系統兩部分,共同形成了一種集復雜環境精確感知、通行智慧決策與行車控制優化執行的車云協同一體自動駕駛系統。車云協同技術在不同的行車工況與應用場景中,可實現精準的行車環境感知、智慧通行決策與優化行車動作控制,并實現車端與云端之間的信息數據交互與協同。
基于智能網聯的自動駕駛系統車云協同技術主要解決多源異構數據融合不足和前端設備計算力不夠的問題,即將車身傳感器節點的采樣數據(如GPS/INS數據、毫米波雷達數據)和多媒體數據(如攝像頭圖像)按一定頻率傳輸到云端數據庫,同時進行在線處理、離線處理、溯源處理和復雜數據分析。并基于人工智能集成應用算法的智能駕駛控制模型,為車輛決策提供可靠、高效的協同控制方案。
人工智能算法應用技術云平臺是自動駕駛云端系統的核心部分,其結合機器學習、數據挖掘等相關技術,對感知融合信息進行分析,為車輛控制規劃提供決策依據。并利用虛擬化技術及網絡技術整合大規模可擴展的計算、存儲、數據、應用等分布式計算資源完成人工智能模型算法的學習訓練,實現在云端訓練人工智能模型,并通過車云協同技術將其部署到嵌入式平臺,使人工智能算法在車端自動駕駛系統上得到深度應用。
目前網聯技術在自動駕駛領域的應用主要集中在信息服務和頂層監控,通過智能網聯的技術路線實現高度自動駕駛仍需要解決信息安全、傳輸時延、網絡覆蓋等棘手問題才能真正落地應用。
智能計算平臺
自動駕駛汽車從交通運輸工具逐步轉變為新型移動智能終端。汽車功能和屬性的改變導致其電子電氣架構隨之改變,進而需要更強的計算、數據存儲和通信能力作為基礎,車載智能計算平臺是滿足上述要求的重要解決方案。
車載智能計算平臺主要完成的功能是以環境感知數據、導航定位信息、車輛實時數據、云端智能計算平臺數據和其他V2X交互數據等作為輸入,基于環境感知定位、智能規劃決策和車輛運動控制等核心控制算法,輸出驅動、傳動、轉向和制動等執行控制指令,實現車輛的自動控制,并向云端智能計算平臺及V2X設備輸出數據,還能夠通過人機交互界面,實現車輛駕駛信息的人機交互。?