













ScalableMap:用于在線遠距離矢量化高精地圖構建的可擴展地圖學習
本文經自動駕駛之心公眾號授權轉載,轉載請聯系出處。
原標題:ScalableMap: Scalable Map Learning for Online Long-Range Vectorized HD Map Construction
論文鏈接:https://arxiv.org/pdf/2310.13378.pdf
代碼鏈接:https://github.com/jingy1yu/ScalableMap
作者單位:武漢大學

論文思路:
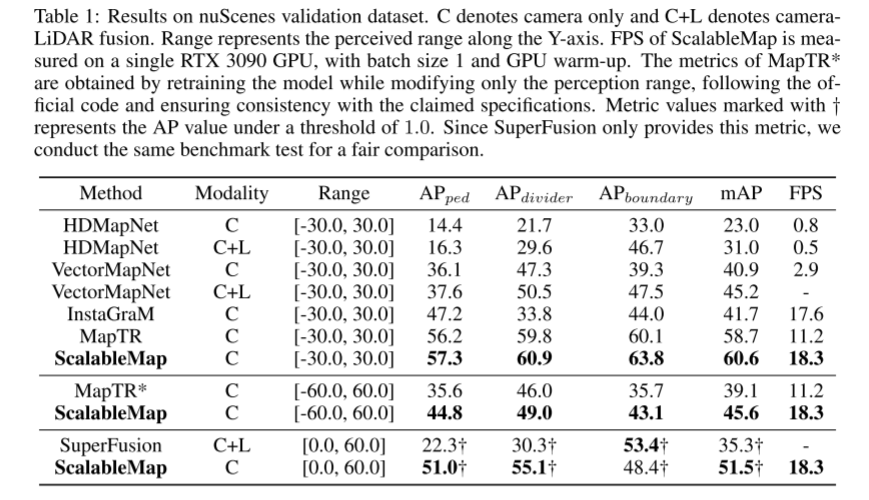
本文提出了一種新穎的端到端 pipeline ,用于使用車載 camera 傳感器構建在線遠距離矢量化高精(HD)地圖。高精地圖的矢量化表示,采用折線和多邊形來表示地圖元素,被下游任務廣泛使用。然而,先前參考動態目標檢測設計的方案忽略了線性地圖元素內的結構約束,導致遠距離場景中的性能下降。本文利用地圖元素的屬性來提高地圖構建的性能。本文在線性結構的指導下提取更準確的鳥瞰圖(BEV)特征,然后提出一種分層稀疏圖表示以進一步利用矢量化圖元素的可擴展性,并基于該表示設計漸進式解碼機制和監督策略。本文的方法 ScalableMap 在 nuScenes 數據集上展示了卓越的性能,尤其是在遠距離場景中,比之前最先進的模型高出 6.5 mAP,同時實現了 18.3 FPS。
主要貢獻:
(i) 本文提出了 ScalableMap,第一個端到端遠距離矢量化地圖構建 pipeline 。本文利用映射元素的結構特性來提取更準確的 BEV 特征,提出基于可擴展矢量化元素的 HSMR,并相應地設計漸進式解碼器和監督策略。所有這些都帶來了卓越的遠距離地圖感知。
(ii) 本文通過大量的實驗評估了 ScalableMap 在 nuScenes 數據集 [17] 上的性能。本文提出的方法在遠距離高精地圖學習中取得了最先進的結果,比現有的多模態方法高出 6.5 mAP,同時達到 18.3 FPS。
網絡設計:
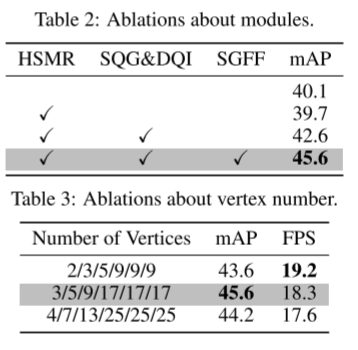
本文的目標是利用矢量化地圖元素的結構特性來解決在較長距離內準確檢測地圖元素的挑戰。首先,本文分別通過兩個分支提取位置感知的 BEV 特征和實例感知的 BEV 特征,并在線性結構的指導下融合它們,得到混合 BEV 特征。接下來,本文提出了一種分層稀疏地圖表示(HSMR),以稀疏但準確的方式抽象地圖元素。將此表示與 DETR [16] 提出的級聯解碼層集成,本文設計了一種漸進解碼器,通過利用矢量化映射元素的可擴展性和漸進監督策略來增強結構化信息的約束,以提高推理的準確性。本文的方案 ScalableMap 動態增加地圖的采樣密度以獲得各種比例的推理結果,使本文能夠更快地獲得更準確的地圖信息。

圖 1:ScalableMap 概述。(a) 結構引導的混合 BEV 特征提取器。(b) 分層稀疏地圖表示和漸進解碼器。(c) 漸進式監督。

圖 2:漸進折線損失的可視化。
實驗結果:


引用:
Yu, J., Zhang, Z., Xia, S., & Sang, J. (2023). ScalableMap: Scalable Map Learning for Online Long-Range Vectorized HD Map Construction. ArXiv. /abs/2310.13378

原文鏈接:https://mp.weixin.qq.com/s/7VIS0B_Qbq7bmHSj6RIxOg






















