













自動(dòng)泊車全面調(diào)研!匯集行業(yè)標(biāo)準(zhǔn)趨勢(shì)、評(píng)測(cè)指標(biāo)、系統(tǒng)介紹各個(gè)方面!
本文經(jīng)自動(dòng)駕駛之心公眾號(hào)授權(quán)轉(zhuǎn)載,轉(zhuǎn)載請(qǐng)聯(lián)系出處。
寫在前面
自動(dòng)泊車系統(tǒng)是指在沒有人工干預(yù)的情況下,車輛本身可以自主的實(shí)現(xiàn)停車位的尋找并完成準(zhǔn)確的泊車,同時(shí)該系統(tǒng)也可以根據(jù)用戶的需求準(zhǔn)確移動(dòng)到用戶指定的位置上。如果自動(dòng)泊車技術(shù)成熟后,可以極大緩解人們?cè)诓窜囘^程中的諸多不便,比如:長(zhǎng)時(shí)間搜尋停車位置浪費(fèi)時(shí)間、在尋找停車位的過程中易出現(xiàn)事故(車輛碰撞、摩擦)等問題。
所以目前很多技術(shù)公司和高校的實(shí)驗(yàn)室都正在探索這個(gè)領(lǐng)域,比如,奔馳和博世等公司已經(jīng)為自動(dòng)泊車系統(tǒng)建立了泊車基礎(chǔ)設(shè)施、NVIDIA正在開發(fā)一種在停車場(chǎng)的自動(dòng)駕駛算法以及關(guān)于停車位的檢測(cè)方法、寶馬公司也準(zhǔn)備將自動(dòng)泊車模塊安裝在其生產(chǎn)的汽車上。
考慮到自動(dòng)泊車技術(shù)在工業(yè)界的廣泛需求,我們對(duì)自動(dòng)泊車系統(tǒng)的發(fā)展?fàn)顟B(tài)進(jìn)行系統(tǒng)性的調(diào)研。包括自動(dòng)泊車系統(tǒng)的行業(yè)標(biāo)準(zhǔn)趨勢(shì)、性能評(píng)測(cè)指標(biāo)、自動(dòng)泊車系統(tǒng)各個(gè)子模塊設(shè)計(jì)到的技術(shù)等。
目前自動(dòng)泊車行業(yè)的標(biāo)準(zhǔn)趨勢(shì)
由于目前自動(dòng)泊車系統(tǒng)受到了來自工業(yè)界和學(xué)術(shù)界的廣泛關(guān)注,各個(gè)國(guó)家和公司都在不斷的開發(fā)自動(dòng)泊車技術(shù)。所以對(duì)于制定自動(dòng)泊車技術(shù)的標(biāo)準(zhǔn)就變的格外重要。目前已經(jīng)制定的技術(shù)標(biāo)準(zhǔn)包括地理信息、室外定位、室內(nèi)空間定位、停車標(biāo)準(zhǔn)以及車輛通信標(biāo)準(zhǔn)幾個(gè)方面的內(nèi)容,具體標(biāo)準(zhǔn)匯總在如下的表格中。

自動(dòng)泊車行業(yè)的相關(guān)標(biāo)準(zhǔn)
- 地理信息和定位標(biāo)準(zhǔn)為室外空間的命名、定義和格式建立了原則和依據(jù),此類標(biāo)準(zhǔn)包括 ISO 14825、ISO 17572 和 ISO TC204 177438等。
- 室內(nèi)空間定位的標(biāo)準(zhǔn)化也在制定當(dāng)中,包括ISO TC211以及OGC標(biāo)準(zhǔn)。
- ISO/DIS 16787 APS停車標(biāo)準(zhǔn)提出了停車所需要的信息類型,并定義了控制車輛的技術(shù)名稱。此外,該標(biāo)準(zhǔn)還定義了實(shí)施輔助停車系統(tǒng)所需要的功能以及執(zhí)行車輛的轉(zhuǎn)向控制功能。
自動(dòng)泊車系統(tǒng)的評(píng)測(cè)標(biāo)準(zhǔn)
目前自動(dòng)泊車系統(tǒng)的評(píng)測(cè)包括兩部分,分別是自動(dòng)駕駛部分的評(píng)測(cè)以及自動(dòng)泊車部分的評(píng)測(cè)。
自動(dòng)駕駛部分的評(píng)測(cè)標(biāo)準(zhǔn)
自動(dòng)駕駛部分的評(píng)測(cè)遵循汽車工程協(xié)會(huì)制定的“自動(dòng)駕駛技術(shù)階段”。該階段目前被劃分為六個(gè)層級(jí)。其中六個(gè)層級(jí)的劃分是基于技術(shù)水平、控制主體以及驅(qū)動(dòng)能力進(jìn)行分類的。目前正在研發(fā)的ISO/WD 34501和ISO/WD 34502標(biāo)準(zhǔn)就用于去更加方便的評(píng)估各個(gè)層級(jí)。ISO/WD 34501標(biāo)準(zhǔn)適用于第三級(jí)系統(tǒng)中測(cè)試場(chǎng)景的術(shù)語和定義,ISO/WD 34502標(biāo)準(zhǔn)定義了測(cè)試場(chǎng)景的指南和安全評(píng)估過程。
自動(dòng)泊車部分的評(píng)測(cè)標(biāo)準(zhǔn)
雖然自動(dòng)泊車技術(shù)目前受到了非常廣泛的關(guān)注,但是對(duì)于評(píng)估自動(dòng)駕駛停車區(qū)域的國(guó)際標(biāo)準(zhǔn)的制定卻剛剛開始。所以與自動(dòng)駕駛中的評(píng)測(cè)標(biāo)準(zhǔn)不同,針對(duì)自動(dòng)泊車的技術(shù)水平是根據(jù)開發(fā)人員的評(píng)估標(biāo)準(zhǔn)來衡量的。
下表展示了交通狀況場(chǎng)景系統(tǒng)中自主停車場(chǎng)景的樣例,該停車場(chǎng)景就是根據(jù)性能級(jí)別進(jìn)行劃分的。

自動(dòng)泊車級(jí)別劃分
在交通狀況場(chǎng)景系統(tǒng)評(píng)估包括自動(dòng)駕駛和停車兩部分場(chǎng)景,并且使用汽車工程協(xié)會(huì)定義的“自動(dòng)駕駛技術(shù)階段“來指出自動(dòng)泊車的能力。目前該系統(tǒng)當(dāng)中包含三個(gè)層級(jí)。
- 第二級(jí)別(Lv2):稱為泊車輔助系統(tǒng)用于幫助人們更方便的泊車。在Lv2級(jí)別中,通常車輛會(huì)配有障礙物距離預(yù)警系統(tǒng)以及后視相機(jī)。
- 第三級(jí)別(Lv3):Lv3級(jí)別可以實(shí)現(xiàn)指定場(chǎng)景下的自動(dòng)泊車。比如在車庫(kù)中停車的這一類簡(jiǎn)單的泊車場(chǎng)景。
- 第四級(jí)別(Lv4):Lv4級(jí)別中可以執(zhí)行Lv3級(jí)別中的所有場(chǎng)景。除此之外,當(dāng)車輛遇到障礙物的時(shí)候,車輛可以在停止或者避開障礙物后返回目的地。
自動(dòng)泊車系統(tǒng)詳解
目前自動(dòng)泊車系統(tǒng)當(dāng)中主要包括三部分的內(nèi)容,如下圖所示,分別是搜索駕駛過程,自動(dòng)泊車過程以及返回駕駛過程。我們先對(duì)每個(gè)過程做一個(gè)大致的介紹,然后再介紹每個(gè)過程目前各自的發(fā)展趨勢(shì)。

自動(dòng)泊車系統(tǒng)的工作流程
搜索駕駛過程
搜索駕駛過程的最終目標(biāo)就是在停車場(chǎng)當(dāng)中汽車可以自主的找到一個(gè)停車位,所以該過程需要用到定位、防撞以及停車位檢測(cè)技術(shù)。
定位技術(shù)介紹
在自動(dòng)泊車系統(tǒng)當(dāng)中,可以使用GPS或者車輛自帶的IMU傳感器來確認(rèn)車輛的速度和姿態(tài)并且糾正車輛的位置估計(jì)誤差。但是在某些室內(nèi)場(chǎng)景,是無法接收到GPS信號(hào)的。所以自動(dòng)駕駛車輛就需要配備相機(jī)、激光雷達(dá)以及毫米波雷達(dá)進(jìn)行輔助。下圖是車輛上配備的一些傳感器信息的介紹。
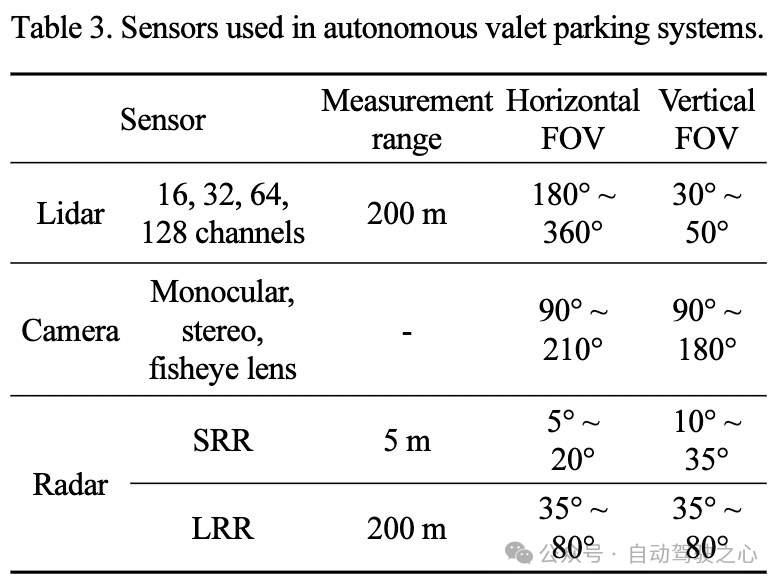
自動(dòng)泊車車輛配備的傳感器信息的介紹
- 激光雷達(dá)傳感器使用激光來檢測(cè)物體。現(xiàn)在主要流行的激光雷達(dá)主要分為16、32、64和128線的激光雷達(dá)。其測(cè)量范圍約為200米,垂直視場(chǎng)為30到50度。
- 相機(jī)傳感器則可以大致分成單目、雙目以及魚眼類型。通常自動(dòng)駕駛車輛配備的相機(jī)其水平視場(chǎng)為90到210度,垂直視場(chǎng)為90到180度。
- 毫米波雷達(dá)根據(jù)距離可以劃分成短程雷達(dá)和長(zhǎng)距雷達(dá)。其中,短程雷達(dá)的范圍大約到5米,水平視場(chǎng)為5到20度,垂直視場(chǎng)為10到35度。長(zhǎng)距雷達(dá)的范圍大約可以到200米,水平和垂直視場(chǎng)為35到80度。
再獲得了這些不同傳感器采集到的信息之后,就可以利用SLAM建圖技術(shù)對(duì)自動(dòng)駕駛車輛周圍的環(huán)境進(jìn)行重建,從而實(shí)現(xiàn)對(duì)車輛的定位。而SLAM建圖技術(shù)又可以分成以下兩大類
- 直接建圖法:跟蹤傳感器移動(dòng)時(shí)變化的數(shù)據(jù)的強(qiáng)度來估計(jì)傳感器的姿態(tài)。但由于該類方法容易受到光照變化的影響,不能實(shí)現(xiàn)重定位,導(dǎo)致目前的建圖方法很少基于此類方法。
- 基于特征的建圖法:該類方法首先從傳感器信息中獲得周圍物體的特征點(diǎn)。從同一對(duì)象接收到的特征點(diǎn)投影到兩個(gè)不同的傳感器坐標(biāo),通過計(jì)算投影點(diǎn)的幾何關(guān)系來估計(jì)目標(biāo)的位置。
防碰撞技術(shù)介紹
由于自動(dòng)泊車系統(tǒng)的主要應(yīng)用場(chǎng)景是在停車場(chǎng),而停車場(chǎng)中會(huì)停有很多車輛,所以防碰撞技術(shù)非常重要。在防碰撞技術(shù)中,主要會(huì)使用超聲波傳感器、短波雷達(dá)傳感器、激光雷達(dá)傳感器以及相機(jī)傳感器。聲波以及雷達(dá)傳感器主要是用來實(shí)現(xiàn)準(zhǔn)確的測(cè)距。相機(jī)傳感器主要是利用同一物體在連續(xù)圖像中位置的差異來估計(jì)深度上的距離。
停車位檢測(cè)技術(shù)
停車位檢測(cè)是在搜索駕駛的過程中不斷執(zhí)行的,通常會(huì)包括傳統(tǒng)的計(jì)算機(jī)視覺、深度學(xué)習(xí)以及兩種方法的混合實(shí)現(xiàn)。
傳統(tǒng)的計(jì)算機(jī)視覺主要是指定和識(shí)別停車位的形狀,如車位線檢測(cè)以及特征點(diǎn)檢測(cè),如下圖所示。

車位形狀的例子說明
得益于深度學(xué)習(xí)的快速發(fā)展,目前基于CNN網(wǎng)絡(luò)的方法被廣泛應(yīng)用于停車位檢測(cè)當(dāng)中。下圖表示了用于停車位檢測(cè)的代表性卷積神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)。卷積層學(xué)習(xí)輸入圖像的特征,特征數(shù)據(jù)通過全連接層得到輸出。由于這是一個(gè)完全監(jiān)督的學(xué)習(xí)過程,輸出由訓(xùn)練數(shù)據(jù)中的標(biāo)記來直接決定。
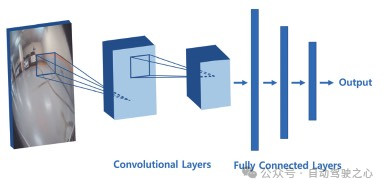
基于卷積神經(jīng)網(wǎng)絡(luò)的停車位檢測(cè)流程
自動(dòng)泊車過程
如果上一步的搜索駕駛過程找到了可用的停車位后,系統(tǒng)就會(huì)調(diào)用自動(dòng)泊車過程。一般來說,我們會(huì)使用路徑生成方法實(shí)現(xiàn)自主泊車過程。目前主流的路徑生成方法主要有基于算法的方法以及基于強(qiáng)化學(xué)習(xí)的方法。
基于算法的方法涉及計(jì)算停車位的位置和形狀的路徑以及車輛的當(dāng)前位置。算法為了計(jì)算出合適的停車路徑會(huì)涉及最優(yōu)控制問題、基于網(wǎng)格的路徑規(guī)劃方法以及快速探索隨機(jī)樹等算法。
基于強(qiáng)化學(xué)習(xí)的方法可以為自動(dòng)泊車模擬器中的自主停車過程生成最優(yōu)路徑。在自動(dòng)泊車模擬器中,車輛會(huì)學(xué)習(xí)一個(gè)通用的停車過程。該學(xué)習(xí)方法通過重復(fù)路徑的生成過程和評(píng)估來不斷獲得停車精度最高的最優(yōu)路徑,如下圖所示。

自動(dòng)泊車的反向停車過程
返回駕駛過程
返回駕駛過程是指在自動(dòng)駕駛車輛駛?cè)胪\囄贿M(jìn)行等待的時(shí)候,用戶可以對(duì)車輛進(jìn)行調(diào)用,使其移動(dòng)到用戶指定好的地方。在這個(gè)過程當(dāng)中,我們需要使用到路徑跟蹤技術(shù)。
目前而言,路徑跟蹤技術(shù)包括跟蹤行進(jìn)路徑的方法以及跟蹤修改路徑的方法。但是這兩種方法都使用了類似的車輛控制算法,具體可以參考論文【1-2】。其大體思路就是在考慮車輛當(dāng)前位置和轉(zhuǎn)向角條件的情況下,執(zhí)行沿著生成路徑移動(dòng)車輛的控制命令。
結(jié)論
由于目前自動(dòng)泊車技術(shù)的需求逐漸增加,各個(gè)國(guó)家和廠商都在大力發(fā)展自動(dòng)泊車系統(tǒng)。考慮到自動(dòng)泊車技術(shù)的快速發(fā)展,在這篇文章中,我們總結(jié)了自動(dòng)泊車系統(tǒng)當(dāng)中的標(biāo)準(zhǔn)化趨勢(shì)、評(píng)測(cè)標(biāo)準(zhǔn)以及自動(dòng)泊車各個(gè)組成系統(tǒng)的進(jìn)行詳細(xì)的介紹,希望可以給大家?guī)韼椭?/p>

原文鏈接:https://mp.weixin.qq.com/s/UPwW0E8LTX5V79GK12HF_Q













