













端到端沒有數(shù)據(jù)怎么辦?ActiveAD:面向規(guī)劃的端到端自動駕駛主動學(xué)習(xí)!
本文經(jīng)自動駕駛之心公眾號授權(quán)轉(zhuǎn)載,轉(zhuǎn)載請聯(lián)系出處。
自動駕駛的端到端可微學(xué)習(xí)最近已成為一種突出的范式。一個主要瓶頸在于其對高質(zhì)量標記數(shù)據(jù)的巨大需求,例如3D框和語義分割,這些數(shù)據(jù)的手動注釋成本是出了名的昂貴。由于AD中樣本內(nèi)的行為往往存在長尾分布這一突出事實,這一困難更加明顯。換言之,收集到的大部分數(shù)據(jù)可能微不足道(例如,在筆直的道路上向前行駛),只有少數(shù)情況是安全關(guān)鍵的。在本文中,我們探討了一個實際重要但未被充分探索的問題,即如何實現(xiàn)端到端AD的樣本和標簽效率。
具體而言,論文設(shè)計了一種面向規(guī)劃的主動學(xué)習(xí)方法,該方法根據(jù)所提出的規(guī)劃路線的多樣性和有用性標準,逐步注釋部分收集的原始數(shù)據(jù)。經(jīng)驗上,提出的計劃導(dǎo)向方法可以在很大程度上優(yōu)于一般的主動學(xué)習(xí)方法。值得注意的是,方法僅使用30%的nuScenes數(shù)據(jù),就實現(xiàn)了與最先進的端到端AD方法相當?shù)男阅堋OM覀兊墓ぷ髂軌蚣钗磥淼墓ぷ鳎瑥囊詳?shù)據(jù)為中心的角度,除了方法論方面的努力之外。
論文鏈接:https://arxiv.org/pdf/2403.02877.pdf
本文的主要貢獻:
- 第一個深入研究E2E-AD的數(shù)據(jù)問題的人。還提供了一個簡單而有效的解決方案,可以在有限的預(yù)算內(nèi)識別和注釋有價值的數(shù)據(jù),用于規(guī)劃。
- 基于端到端方法的面向規(guī)劃的哲學(xué),為規(guī)劃路線設(shè)計了新的特定任務(wù)的多樣性和不確定性測量。
- 大量的實驗和消融研究證明了方法的有效性。ActiveAD在很大程度上優(yōu)于一般的對等方法,并且僅使用30%的nuScenes數(shù)據(jù),實現(xiàn)了與具有完整標簽的SOTA方法相當?shù)男阅堋?/li>
方法介紹
在端到端AD框架內(nèi)提供了ActiveAD的詳細描述。利用AD特有的數(shù)據(jù)特征,設(shè)計了相應(yīng)的多樣性和不確定性指標。
1)標簽的初始樣本選擇
對于計算機視覺中的主動學(xué)習(xí),初始樣本選擇通常僅基于原始圖像,而沒有額外的信息或?qū)W習(xí)到的特征,這導(dǎo)致了隨機初始化的常見做法。對于AD,還有其他先前的信息可供利用。具體來說,當從傳感器收集數(shù)據(jù)時,可以同時記錄傳統(tǒng)信息,如自車的速度和軌跡。此外,天氣和照明條件通常是連續(xù)的,并且易于在片段級別中進行注釋。這些信息有利于為初始集合選擇做出明智的選擇。因此,我們?yōu)槌跏歼x擇設(shè)計了自我多樣性度量。
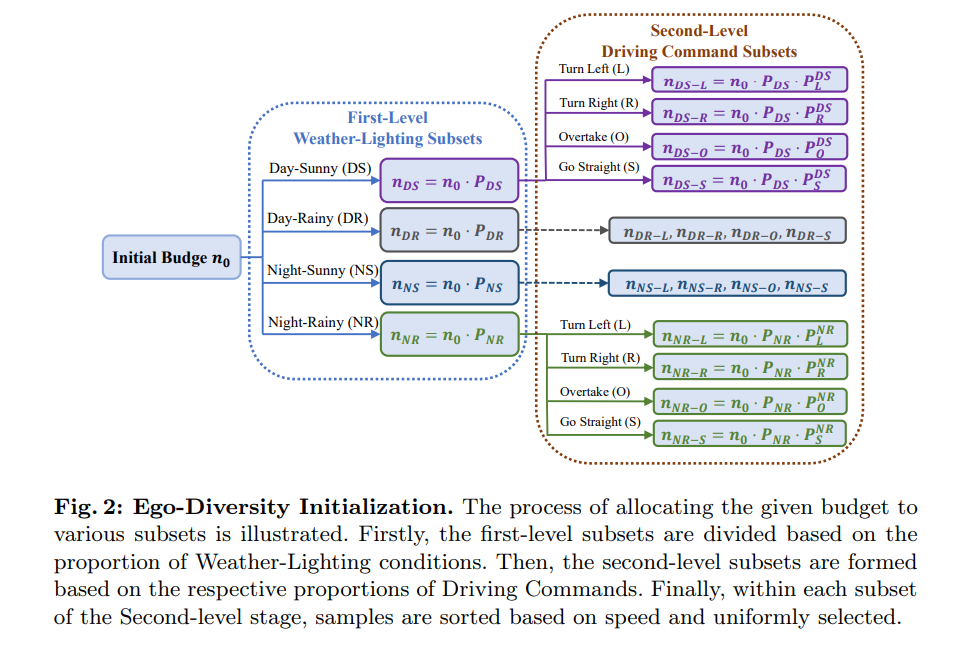
Ego Diversity:由三個部分組成:1)天氣照明2)駕駛指令3)平均速度。首先使用nuScenes中的描述,將完整的數(shù)據(jù)集劃分為四個互斥子集:Day Sunny(DS)、Day Rainy(DR)、Night Sunny(NS)、NightRainy(NR)。其次,根據(jù)一個完整片段中左、右和直行駕駛命令的數(shù)量將每個子集分為四類:左轉(zhuǎn)(L)、右轉(zhuǎn)(R)、超車(O)、直行(S)。論文設(shè)計了一個閾值τc,其中如果剪輯中左右命令的數(shù)量都大于或等于閾值τc時,我們將其視為該剪輯中的超越行為。如果只有向左命令的數(shù)量大于閾值τc,則表示左轉(zhuǎn)。如果只有向右命令的數(shù)量大于閾值τc,則表示向右轉(zhuǎn)彎。所有其它情況都被認為是直接的。第三,計算每個場景中的平均速度,并在相關(guān)的子集中按升序?qū)λ鼈冞M行排序。


圖2給出了基于多路樹的初始選擇過程的詳細直觀過程。
2)增量選擇的準則設(shè)計
在本節(jié)將介紹如何基于使用已注釋片段訓(xùn)練的模型,對片段的新部分進行增量注釋。我們將使用中間模型對未標記的片段進行推理,隨后的選擇基于這些輸出。盡管如此,還是采取了面向規(guī)劃的觀點,并介紹了后續(xù)數(shù)據(jù)選擇的三個標準:位移誤差、軟碰撞和代理不確定性。
標準一:位移誤差(DE)。將表示為模型的預(yù)測規(guī)劃路線τ與數(shù)據(jù)集中記錄的人類軌跡τ*之間的距離。

其中T表示場景中的幀。由于位移誤差本身是一個性能指標(無需注釋),因此它自然成為主動選擇中的第一個也是最關(guān)鍵的標準。
標準二:軟碰撞(SC)。將LSC定義為預(yù)測的自車軌跡和預(yù)測的agent軌跡之間的距離。將通過閾值ε過濾掉低置信度agent預(yù)測。在每個場景中,選擇最短距離作為危險系數(shù)的度量。同時,在term和最近距離之間保持正相關(guān):

使用“軟碰撞”作為一個標準,因為:一方面,與“置換誤差”不同,“碰撞比率”的計算取決于目標的3D框的注釋,而這些注釋在未標記的數(shù)據(jù)中不可用。因此,應(yīng)該能夠僅根據(jù)模型的推理結(jié)果來計算標準。另一方面,考慮一個硬碰撞標準:如果預(yù)測的自車軌跡會與其他預(yù)測的agent的軌跡發(fā)生碰撞,將其指定為1,否則指定為0。然而,這可能會導(dǎo)致標簽為1的樣本太少,因為AD中最先進模型的碰撞率通常很小(低于1%)。因此,選擇使用與其他對目標最近的距離來代替“碰撞率”度量。當與其他車輛或行人的距離太近時,風險被認為要高得多。簡言之,“軟碰撞”是衡量碰撞可能性的有效指標,可以提供密集的監(jiān)督。
標準III:agent不確定性(AU)。對周圍agent的未來軌跡的預(yù)測自然具有不確定性,因此運動預(yù)測模塊通常會生成多個模態(tài)和相應(yīng)的置信度得分。我們的目標是選擇那些附近agent具有高度不確定性的數(shù)據(jù)。具體來說,通過距離閾值δ過濾出遙遠的主體,并計算剩余主體的多種模式的預(yù)測概率的加權(quán)熵。假設(shè)模態(tài)的數(shù)量是,并且agent在不同模態(tài)下的置信度得分是Pi(a),其中i∈{1,…,Nm}。然后,Agent不確定性可以定義為:

Overall Loss:

3)整體主動學(xué)習(xí)范式
Alg1介紹了方法的整個工作流程。給定可用預(yù)算B、初始選擇大小n0、在每個步驟中進行的活動選擇的數(shù)量ni以及總共M個選擇階段。首先使用上述描述的隨機化或自車多樣性方法初始化選擇。然后,使用當前注釋的數(shù)據(jù)來訓(xùn)練網(wǎng)絡(luò)。基于訓(xùn)練的網(wǎng)絡(luò),我們對未標記的進行預(yù)測,并計算總損失。最后根據(jù)總體損失對樣本進行排序,并選擇當前迭代中要注釋的前ni個樣本。重復(fù)這個過程,直到迭代達到上限M,并且所選擇的樣本數(shù)量達到上限B。

實驗結(jié)果
在廣泛使用的nuScenes數(shù)據(jù)集上進行了實驗。所有實驗都使用PyTorch實現(xiàn),并在RTX 3090和A100 GPU上運行。
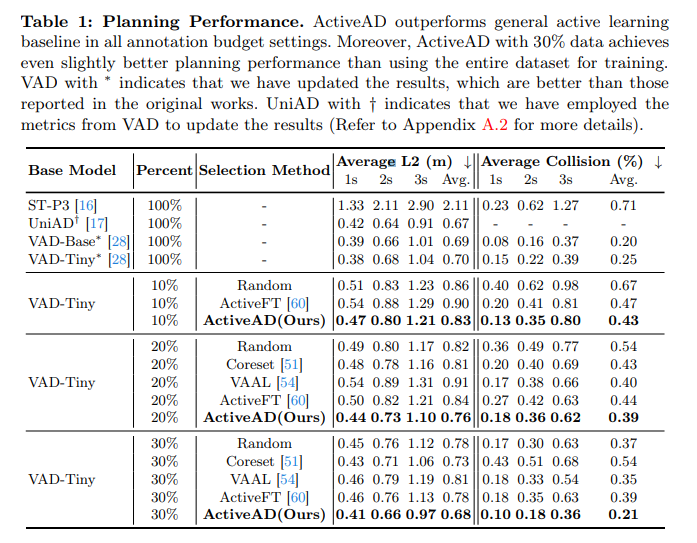
表1:規(guī)劃表現(xiàn)。ActiveAD在所有注釋budget設(shè)置中都優(yōu)于一般的主動學(xué)習(xí)基線。此外,與使用整個數(shù)據(jù)集進行訓(xùn)練相比,具有30%數(shù)據(jù)的ActiveAD實現(xiàn)了略好的規(guī)劃性能。帶有*的VAD表明已經(jīng)更新了結(jié)果,這些結(jié)果比原始工作中報告的結(jié)果要好。帶有?的UniAD表明已使用VAD的指標來更新結(jié)果。
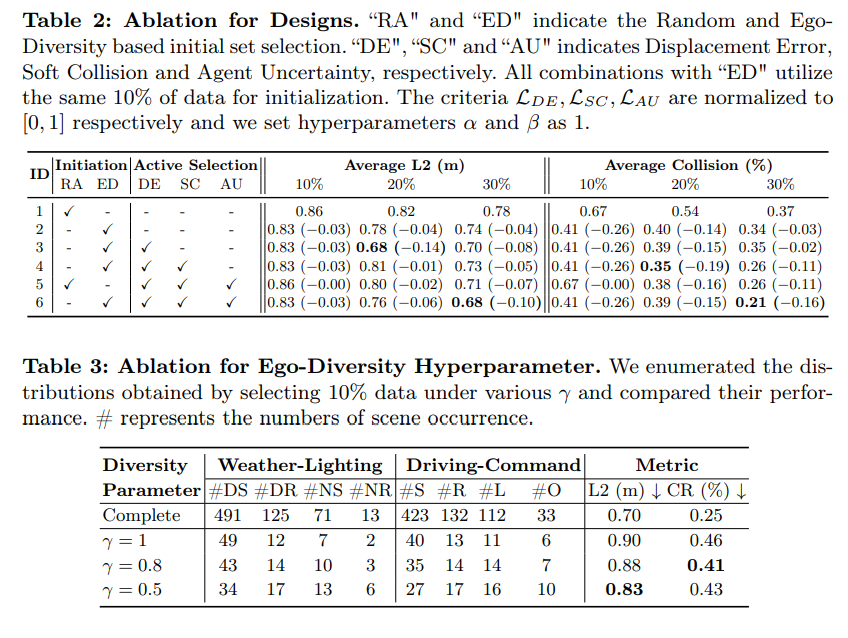
表2:設(shè)計消融實驗。“RA”和“ED”表示基于隨機性和自車多樣性的初始集選擇。“DE”、“SC”和“AU”表示位移誤差, 分別為軟碰撞和agent不確定性。所有帶“ED”的組合都使用相同的10%數(shù)據(jù)進行初始化。LDE、LSC和LAU分別歸一化為[0,1],將超參數(shù)α和β設(shè)置為1。
圖3:所選場景可視化。根據(jù)選擇的前置攝像頭圖像基于在10%數(shù)據(jù)上訓(xùn)練的模型的位移誤差(col 1)、軟碰撞(col 2)、agent不確定性(col 3)和混合(col 4)標準。Mixed代表了我們的最終選擇策略ActiveAD,并考慮了前三種情況!
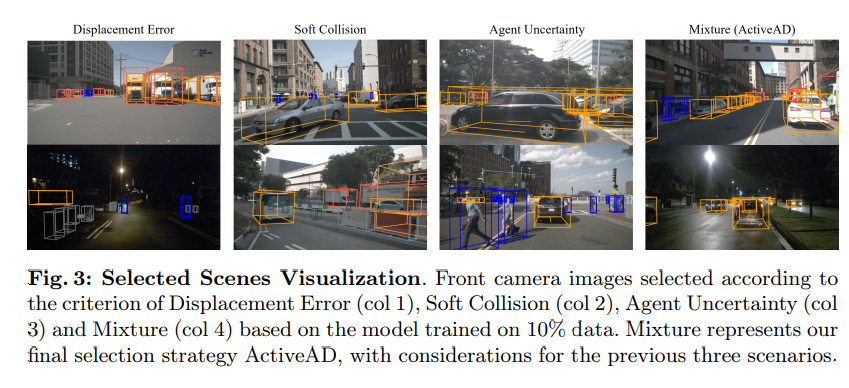
表4,各種場景下的性能。在各種天氣/照明和駕駛命令條件下,使用30%數(shù)據(jù)的活動模型的平均L2(m)/平均碰撞率(%)越小,性能越好。
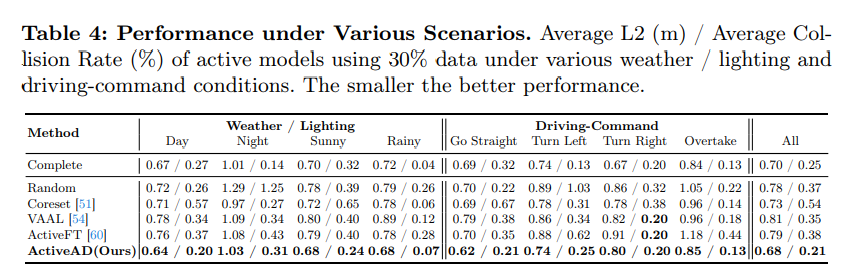
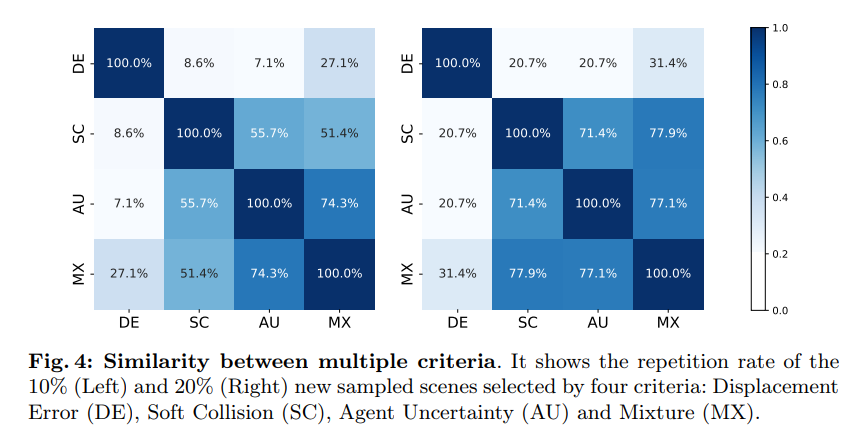
圖4:多個標準之間的相似性。它顯示了 通過四個標準選擇10%(左)和20%(右)的新采樣場景:位移誤差(DE)、軟碰撞(SC)、代理不確定性(AU)和混合(MX)
本工作的一些結(jié)論
為了解決端到端自動駕駛數(shù)據(jù)標注的高成本和長尾問題,率先開發(fā)了量身定制的主動學(xué)習(xí)方案ActiveAD。ActiveAD基于面向規(guī)劃的哲學(xué),引入了新的任務(wù)特定的多樣性和不確定性度量。大量實驗證明了方法的有效性,僅使用30%的數(shù)據(jù),就顯著超過了一般的往期方法,并實現(xiàn)了與最先進模型相當?shù)男阅堋_@代表著從以數(shù)據(jù)為中心的角度對端到端自動駕駛的一次有意義的探索,并希望我們的工作能夠啟發(fā)未來的研究和發(fā)現(xiàn)。






























