ST-P3:端到端時空特征學習的自動駕駛視覺方法
arXiv論文“ST-P3: End-to-end Vision-based Autonomous Driving via Spatial-Temporal Feature Learning“,22年7月,作者來自上海交大、上海AI實驗室、加州圣地亞哥分校和京東公司的北京研究院。

提出一種時空特征學習方案,可以同時為感知、預測和規(guī)劃任務提供一組更具代表性的特征,稱為ST-P3。具體而言,提出一種以自車為中心對齊(egocentric-aligned)的累積技術,在感知BEV轉換之前保留3-D空間中的幾何信息;作者設計一種雙路(dual pathway )模型,將過去的運動變化考慮在內,用于未來的預測;引入一個基于時域的細化單元,補償為規(guī)劃的基于視覺元素識別。源代碼、模型和協(xié)議詳細信息開源https://github.com/OpenPerceptionX/ST-P3.
開創(chuàng)性的LSS方法從多視圖攝像機中提取透視特征,通過深度估計將其提升到3D,并融合到BEV空間。兩個視圖之間的特征轉換,其潛深度預測至關重要。
將二維平面信息提升到三維需要附加維度,即適合三維幾何自主駕駛任務的深度。為了進一步改進特征表示,自然要將時域信息合并到框架中,因為大多數場景的任務是視頻源。
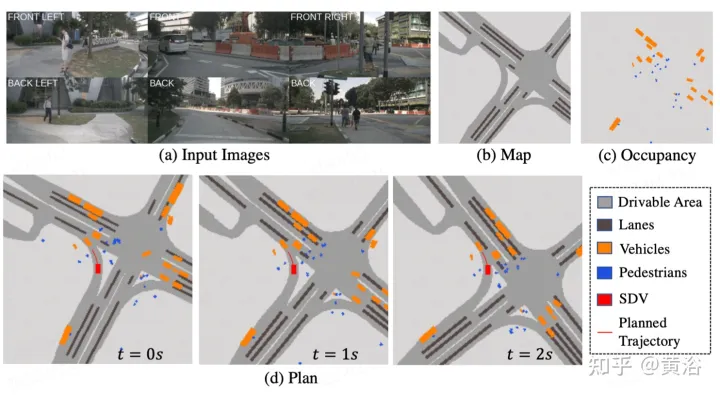
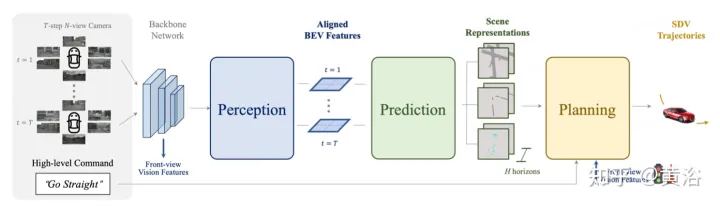
如圖描述ST- P3總體框架:具體來說,給定一組周圍的攝像機視頻,將其輸入主干生成初步的前視圖特征。執(zhí)行輔助深度估計將2D特征轉換到3D空間。以自車為中心對齊累積方案,首先將過去的特征對齊到當前視圖坐標系。然后在三維空間中聚合當前和過去的特征,在轉換到BEV表示之前保留幾何信息。除了常用的預測時域模型外,通過構建第二條路徑來解釋過去的運動變化,性能得到進一步提升。這種雙路徑建模確保了更強的特征表示,推斷未來的語義結果。為了實現軌跡規(guī)劃的最終目標,整合網絡早期的特征先驗知識。設計了一個細化模塊,在不存在高清地圖的情況下,借助高級命令生成最終軌跡。
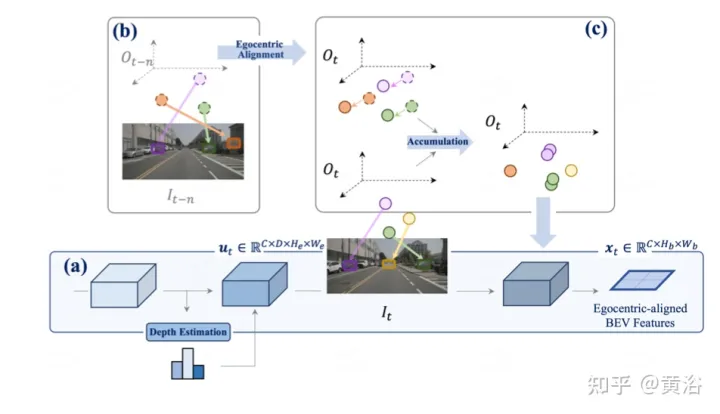
如圖是感知的以自我為中心對齊累計方法。(a) 利用深度估計將當前時間戳處的特征提升到3D,并在對齊后合并到BEV特征;(b-c)將先前幀的3D特征與當前幀視圖對齊,并與所有過去和當前狀態(tài)融合,從而增強特征表示。
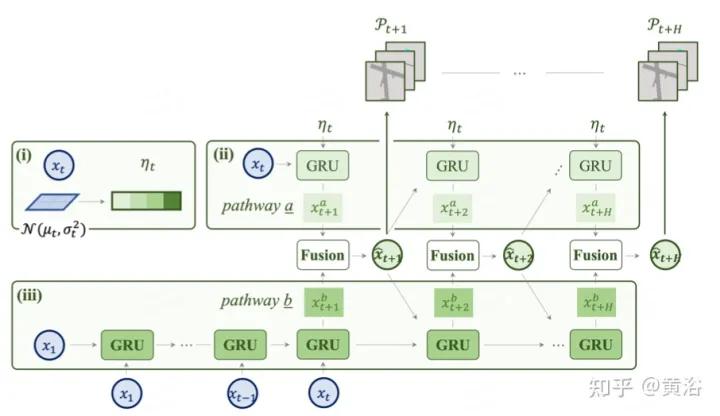
如圖是用于預測的雙路模型:(i) 潛碼是來自特征圖的分布;(ii iii)路a結合了不確定性分布,指示未來的多模態(tài),而路b從過去的變化中學習,有助于路a的信息進行補償。
作為最終目標,需要規(guī)劃一條安全舒適的軌跡,到達目標點。這個運動規(guī)劃器對一組不同的軌跡進行采樣,并選擇一個最小化學習成本函數的軌跡。然而,通過一個時域模型來整合目標(target)點和交通燈的信息,加上額外的優(yōu)化步驟。
如圖是為規(guī)劃的先驗知識集成和細化:總體成本圖包括兩個子成本。使用前視特征進一步重新定義最小成本軌跡,從攝像機輸入中聚合基于視覺的信息。
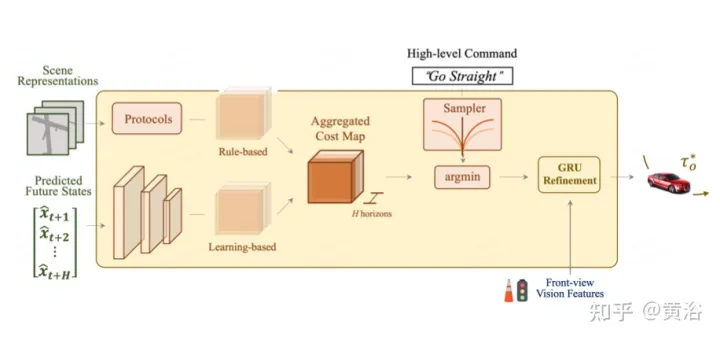
懲罰具有較大橫向加速度、急動或曲率的軌跡。希望這條軌跡能夠有效地到達目的地,因此向前推進的軌跡將獎勵。然而,上述成本項不包含通常由路線地圖提供的目標(target)信息。采用高級命令,包括前進、左轉和右轉,并且只根據相應的命令評估軌跡。
此外,交通信號燈對SDV至關重要,通過GRU網絡優(yōu)化軌跡。用編碼器模塊的前攝像頭特征初始化隱藏狀態(tài),并用成本項的每個采樣點作為輸入。
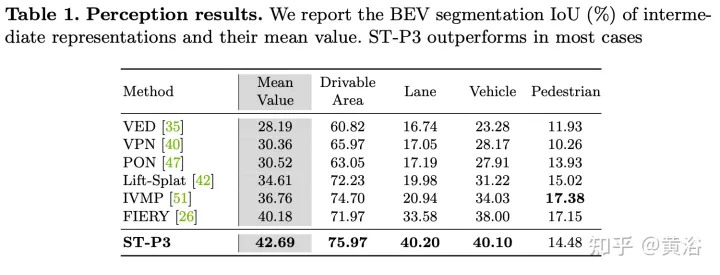
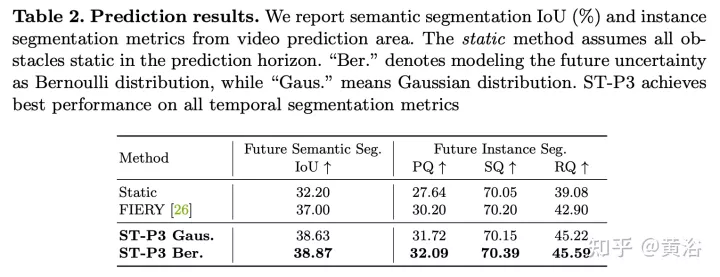
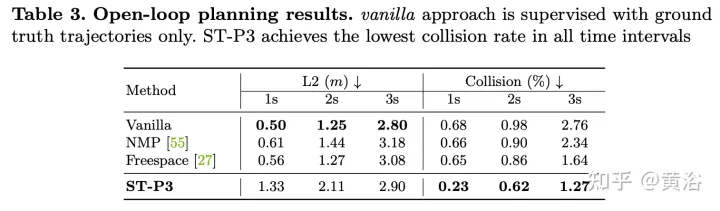
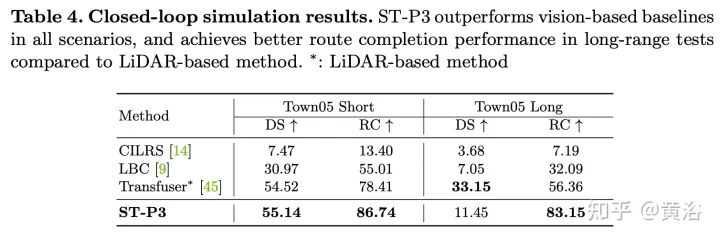
實驗結果如下: