













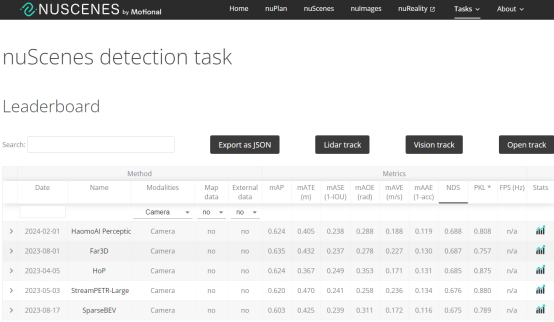
毫末智行刷新nuSecnces自動(dòng)駕駛公開(kāi)數(shù)據(jù)集障礙物檢測(cè)榜單,關(guān)鍵指標(biāo)NDS達(dá)到68.8%
近日,在全球權(quán)威的自動(dòng)駕駛nuScenes競(jìng)賽的最新評(píng)測(cè)中,毫末智行斬獲純視覺(jué)3D目標(biāo)檢測(cè)任務(wù)(nuScenes Detection task)無(wú)外部數(shù)據(jù)榜單第一名,并將關(guān)鍵性指標(biāo)nuScenes Detection Score(NDS)提高到68.8%。
自動(dòng)駕駛純視覺(jué)感知算法已經(jīng)成為行業(yè)的熱點(diǎn),如何提高基于視覺(jué)的3D障礙物的精度和準(zhǔn)確度成為當(dāng)下核心的技術(shù)挑戰(zhàn)。毫末在此項(xiàng)檢測(cè)任務(wù)中主要使用了兩種方法,一種是基于NeRF的三維建模方法,并基于此方法設(shè)計(jì)了深度分支網(wǎng)絡(luò)模型來(lái)輸出深度偽標(biāo)簽,另一種是由SEEM監(jiān)督的語(yǔ)義分支網(wǎng)絡(luò)來(lái)輸出語(yǔ)義偽標(biāo)簽,最終結(jié)合深度偽標(biāo)簽、語(yǔ)義偽標(biāo)簽來(lái)提升檢測(cè)效果。
nuScenes數(shù)據(jù)集是目前自動(dòng)駕駛領(lǐng)域中最流行的公開(kāi)數(shù)據(jù)集之一,數(shù)據(jù)采集自波士頓和新加坡的實(shí)際自動(dòng)駕駛場(chǎng)景,是第一個(gè)集成攝像頭、激光雷達(dá)和毫米波雷達(dá)等多種傳感器,實(shí)現(xiàn)360度全傳感器覆蓋的數(shù)據(jù)集。nuScenes數(shù)據(jù)集提供了二維、三維物體標(biāo)注、點(diǎn)云分割、高精地圖等豐富的標(biāo)注信息,包含1000個(gè)場(chǎng)景,擁有140萬(wàn)幀圖像、39萬(wàn)幀激光雷達(dá)點(diǎn)云數(shù)據(jù)、23個(gè)物體類(lèi)別、140萬(wàn)個(gè)三維標(biāo)注框,其數(shù)據(jù)標(biāo)注量比KITTI數(shù)據(jù)集高出7倍以上。
所謂純視覺(jué)3D目標(biāo)檢測(cè)任務(wù),就是在不使用激光雷達(dá)、毫米波雷達(dá)等額外的傳感器信息條件下,僅使用6個(gè)攝像頭完成車(chē)外360度環(huán)視視野的3D目標(biāo)檢測(cè),不僅需要檢測(cè)周?chē)h(huán)境中所有的車(chē)、行人、障礙物、交通標(biāo)志、指示燈等若干類(lèi)對(duì)象,還要精確感知到他們?cè)谡鎸?shí)物理世界中的位置、大小、方向、速度等信息。該項(xiàng)任務(wù)的主要難點(diǎn)是通過(guò)2D圖像難以準(zhǔn)確的獲取目標(biāo)的真實(shí)深度和速度,當(dāng)提取的深度信息不準(zhǔn)確時(shí),一切的三維感知任務(wù)都會(huì)變得異常困難;而當(dāng)提取的速度信息不準(zhǔn)確時(shí),則可能會(huì)對(duì)后續(xù)的決策規(guī)劃任務(wù)產(chǎn)生致命性的影響。
得益于更先進(jìn)算法和更高算力的進(jìn)步,nuScenes競(jìng)賽的3D目標(biāo)檢測(cè)任務(wù)榜單成績(jī)不斷取得提升,其中毫末AI技術(shù)團(tuán)隊(duì)將關(guān)鍵性指標(biāo)NDS提升到68.8%,充分展示了其在自動(dòng)駕駛技術(shù)領(lǐng)域的實(shí)力。





















