













加州理工讓無人機長出腿:走路飛行無縫切換,還能玩滑板、走鋼絲
本文經AI新媒體量子位(公眾號ID:QbitAI)授權轉載,轉載請聯系出處。
這款雙足機器人,有億點點不一樣。
最引人注目的是細腿高跟鞋,然后是雙臂上的螺旋槳推進器。

這不同尋常的組合是要做什么?
先表演一個蕪湖起飛,然后優雅地著陸,在走路與飛行之間平穩銜接。
4個螺旋槳除了當作飛行的推進器以外,在地面上也負責控制機器人在所有方向上的姿態,保持平衡。
于是這只機器人就能hold住最近流行的“走扁帶”運動(Slackline),類似于走鋼絲。

還可以挑戰滑板繞樁。
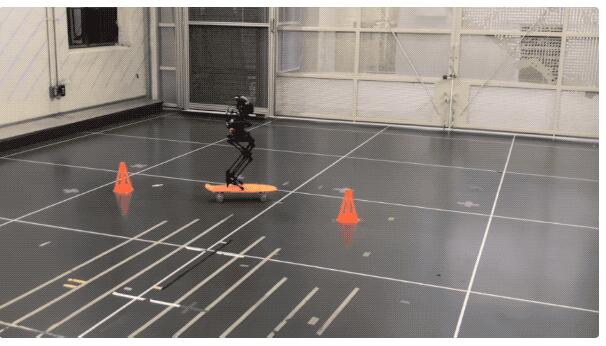
這款機器人小名叫Leo,大名Leonardo。名字其實是研究人員玩的一個文字游戲,縮寫自帶腿無人機(LEgs ONboARD drOne)。
LEO來自加州理工大學,相關論文還登上了最新一期Science子刊Science Robotics封面。

要去做高壓線檢修
除了展示效果中的炫技,LEO的開發目的實際是瞄準了特定的應用場景。
也就是地面機器人和無人機難以獨立完成的任務,典型的有高壓線路檢修和高架橋檢測。
這些任務靠人去做比較危險,傳統的雙足機器人夠不著,無人機懸停時面對氣流擾動又不夠穩定。
LEO靠雙腿和螺旋槳的配合,只要給他一個能站的平面,哪怕是撒上油的易滑平面都能保持穩定。

和商用無人機做對比,風一來無人機就被吹跑了,而LEO還能維持在原地繼續工作。
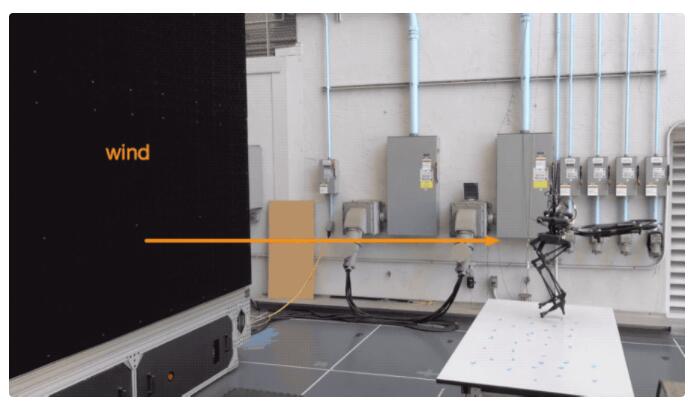
把風力加強?問題也不大。

這樣的平衡能力LEO是怎么做到的?
靈感來自鳥類
論文的通訊作者,加州理工Soon-Jo Chung介紹到LEO的設計靈感來自鳥類在電線之間移動跳躍的方式。
機器人要向鳥類學習的是在飛行和行走模式之間的正確切換。
LEO機器人在飛行時保持一個平滑的軌跡,到達著陸點時要把飛行速度調整到著陸后的行走速度一致。
這樣一只腳著陸后切換到走路模式,就可以沿著相同的速度平穩地繼續行走。
這些控制由機器人身上搭載的狀態機電路和腳上的傳感器來完成。
另外想要飛起來必須做到重量輕,LEO主要部分由碳纖維材質組成,身高0.75米,重量只有2.58千克。
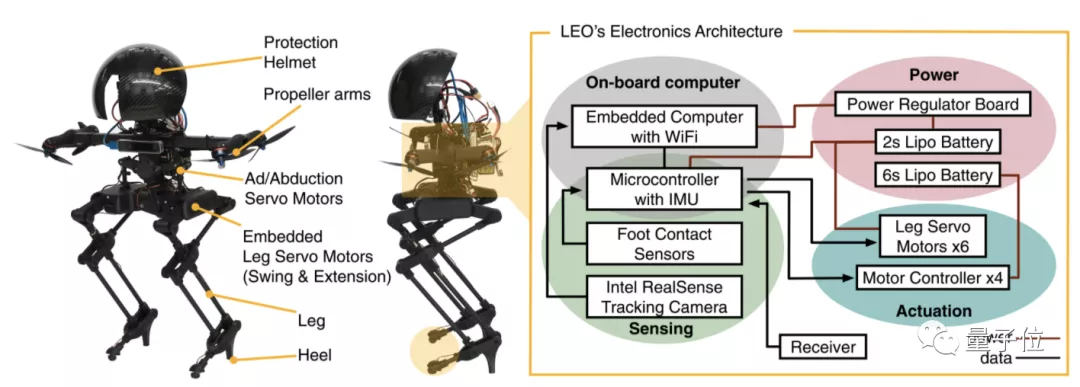
控制腿運動的是集成式直流無刷電機,裝在靠近腰部的位置,這樣可以減少腿的慣性。
腳尖部分是半球形的聚氨酯橡膠,這種材料摩擦系數很高可以防止滑倒。
高跟鞋的設計也是為了盡可能減少面積和重量,同時在站立不動的時候能保持穩定。
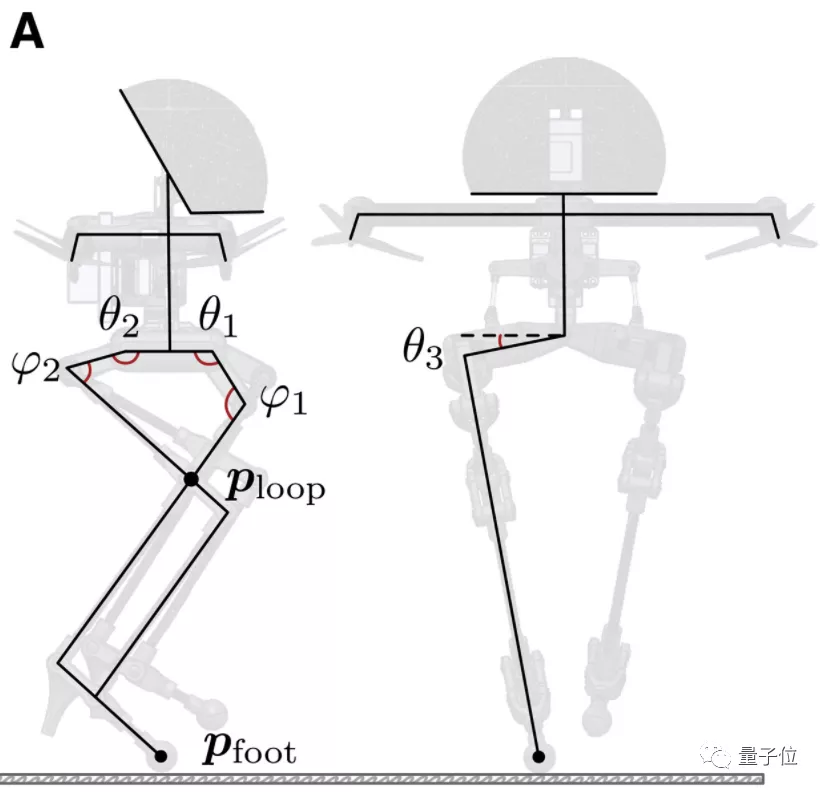
手臂上則是4個傾斜螺旋槳推進器,在不飛行的時候也可以靠推力承擔一部分機身的重量,能從任意方向控制機器人姿態。
這樣的輕便設計也付出了很多代價,比如行走的效率很低。
行走時總共544瓦特的功率中,有445瓦特用于控制平衡的螺旋槳推進器,雙腿和其他電子設備加起來只消耗99瓦特。
用衡量運動時能耗的CoT指標 (Cost of Transportation)來表示的話,LEO以每秒20厘米速度行走時的CoT值是108,3米每秒速度飛行時CoT值可降至15。
對比人類用的生物能源CoT值則遠小于1,波士頓動力的雙足機器人行走時CoT值在20左右。
目前,LEO身上背的電池只能維持它進行100秒飛行或3.5分鐘行走。
對此,研究人員解釋到效率優化目前還不是優先級最高的任務,打算先把該有的功能都實現再考慮。
要真正去完成工作,還需要把LEO的螺旋槳短臂擴展成真正的手臂,以及用視覺算法和機器學習來增加機器人的自主性。
研究人員計劃下次再做展示時要造出兩個LEO機器人,然后讓他們對打羽毛球和網球。
這樣一個機器人要是飛起來扣球,想想還挺刺激的。
論文地址:
https://www.science.org/doi/10.1126/scirobotics.abf8136
演示視頻:
https://www.youtube.com/watch?v=h3bkvVXsVFM




















