扛住強風的無人機?加州理工用12分鐘飛行數據教會無人機御風飛行
當風大到可以把傘吹壞的程度,無人機卻穩穩當當,就像這樣:
御風飛行是空中飛行的一部分,從大的層面來講,當飛行員駕駛飛機著陸時,風速可能會給他們帶來挑戰;從小的層面來講,陣風也會影響無人機的飛行。
目前來看,無人機要么在受控條件下飛行,無風;要么由人類使用遙控器操作。無人機被研究者控制在開闊的天空中編隊飛行,但這些飛行通常是在理想的條件和環境下進行的。
然而,要想讓無人機自主執行必要但日常的任務,例如運送包裹,無人機必須能夠實時適應風況。
為了讓無人機在風中飛行時具有更好的機動性,來自加州理工學院的一組工程師開發了一種深度神經網絡 Neural-Fly,即一種人工智能工具,可以讓無人機在有風的情況下保持敏捷,只需更新一些關鍵參數,即可幫助無人機實時應對新的和未知的風況。
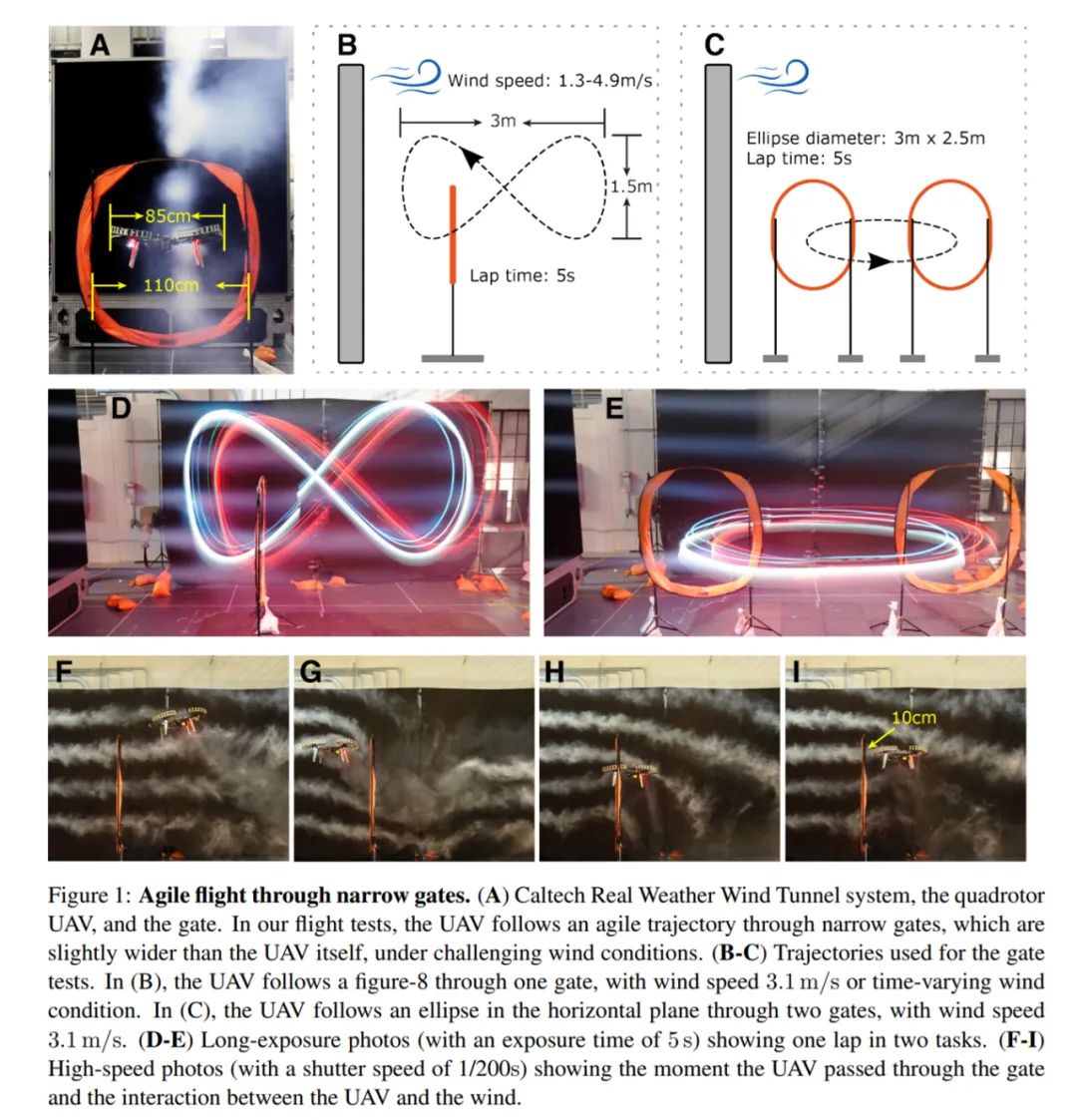
文章開頭我們已經初步見識到了無人機的抗風能力,下面展示了一架四旋翼無人機,借助該研究開發的工具,它可以在風速達到 27 英里 / 小時的情況下完成 8 字形穿梭操作:
換個角度觀賞一下無人機御風飛行:
為了讓無人機可以在各種風速下穿梭,數據是必不可少的,這項研究需要的數據不多,在獲得短短 12 分鐘的飛行數據后,配備 Neural-Fly 的自動四旋翼無人機就學會了如何對強風做出響應。「用到的數據量非常小,」加州理工學院航空航天系研究生 Michael O’Connell 表示,他是論文作者之一。
這項研究已于周三發表在《科學 · 機器人學》(Science Robotics) 雜志上。
- 論文地址:https://www.science.org/doi/10.1126/scirobotics.abm6597
- arXiv 地址:https://arxiv.org/pdf/2205.06908.pdf
在 Neural-Fly 實驗訓練中,無人機在風洞中飛行,有六種不同的風速,最快的是 13.4 英里 / 小時。
根據這些數據,該團隊創建了深度神經網絡,然后讓他們的飛行器能夠熟練地在同一風洞中進行機動,例如以 8 字形圖案放大大門或通過兩個橢圓形大門巡航。無人機在測試中的速度比它在訓練中遇到的更快:大約每小時 27 英里。這是該風洞可以產生的最大風速,該論文作者、加州理工學院研究生石冠亞指出。除了只需要少量數據外,該軟件僅在 Raspberry Pi 上運行,這是一種廉價的計算設備。
加州理工學院航空航天、控制和動力學系統教授、通訊作者 Soon-Jo Chung 表示,他們看到的誤差率與現有的 SOTA 技術相比,配備新系統的無人機飛行性能要好 2.5 至 4 倍。
下圖從左到右依次為石冠亞、Soon-Jo Chung 和 Michael O'Connell 。值得祝賀的是,石冠亞將在 2023 年 9 月入職卡內基梅隆大學計算機學院機器人研究所擔任助理教授。
研究者表示,這項技術未來將被用于無人機快遞或飛行汽車。
Neural-Fly 技術概覽
無人機(UAV)如果想要實現持續的商業化,在動態高速風中執行安全和精確的飛行機動至關重要。但是,由于不同風況之間的關系以及它們對無人機機動性的影響沒有得到深入地研究,因此使用傳統控制設計方法來設計高效的機器人控制器具有挑戰性。
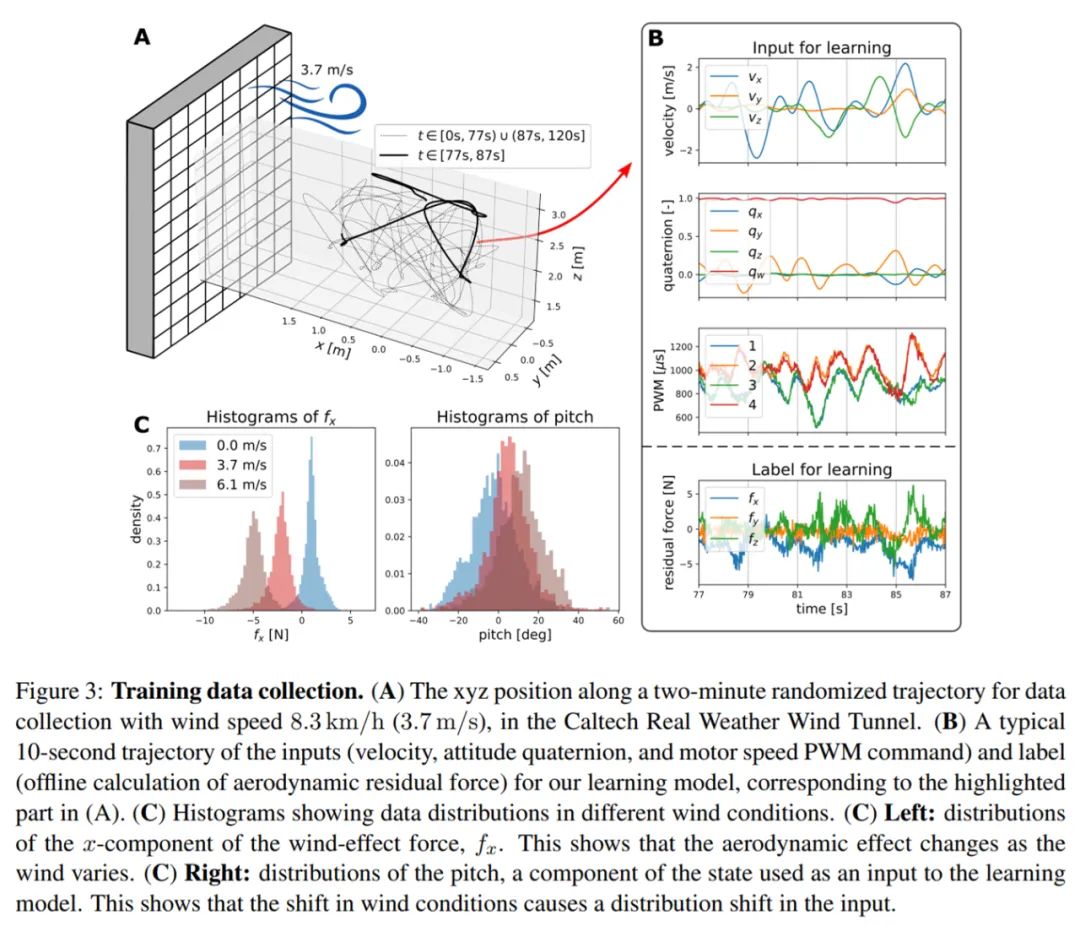
加州理工學院的研究者提出的「Neural-Fly」是一種數據驅動方法,它作為一種基于深度學習的軌跡跟蹤控制器,可以學習快速適應快速變化的風況。下圖 3(A) 為數據收集過程;3(B) 為風速 13.3km/h (3.7m/s) 的情況下,訓練數據的輸入和標簽;3(C) 為不同風況下輸入數據和標簽數據的分布。
在線自適應 + 離線元學習
下圖 2 為 Neural-Fly 方法概覽,表明了它在自適應飛行控制和基于深度學習的機器人控制方面取得了進展。在標準 UAV 的動態風況下,Neural-Fly 實現了對靈活且具有挑戰性軌跡的厘米級位置誤差跟蹤。具體來說,該方法主要有兩部分組成,分別是離線學習階段和用于實時在線學習的在線自適應控制階段。
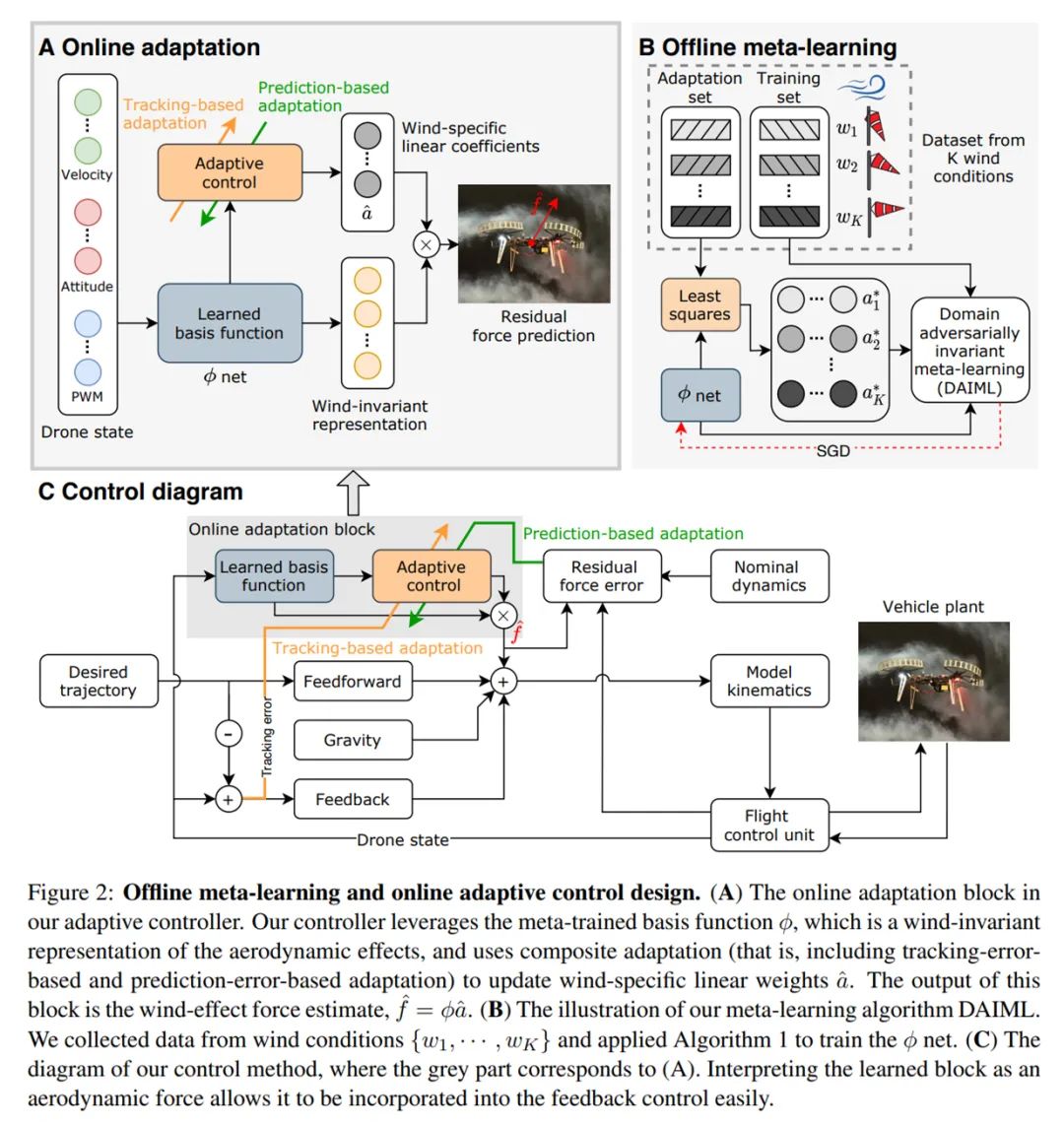
對于離線學習階段,研究者開發了域對抗不變元學習(Domain Adversarially Invariant Meta-Learning, DAIML),它以一種數據高效的方式學習空氣動力學與風況無關的深度神經網絡(DNN)表示。該表示通過更新一組混合深度神經網絡輸出的線性系數來適應不同的風況。
DAIML 還具有數據高效性,僅使用 6 種不同風況下共計 12 分鐘的飛行數據來訓練深度神經網絡。DAIML 包含的幾種關鍵特性不僅可以提升數據效率,而且能夠由下游在線自適應控制階段提供信息。
值得注意的是,DAIML 使用譜歸一化來控制深度神經網絡的 Lipschitz 屬性,以提高對未見過數據的泛化能力,并提供閉環穩定性和穩健性。此外,DAIML 還使用判別式網絡來確保學得的表示具有風不變形,并且風相關信息僅包含在適應在線控制階段的線性系數中。
對于在線自適應控制階段,研究者開發了一種正則化復合自適應控制律,它是基于對學得表示如何與閉環控制系統交互的基本理解中得出的,并具有嚴格的理論支撐。
具體地,自適應律使用位置跟蹤誤差項和氣動力預測誤差項的組合來對與風有關的線性系數進行更新。這種方法有效地保證了對任何風況的穩定和快速適應以及對不完美學習的穩健性。盡管這種自適應控制律能夠與很多學得的模型一起使用,但從 DAIML 中學習的精確表示有助于進一步提升自適應速度。
實驗結果
就 Neural-Fly 的效果而言,它比非線性跟蹤控制器平均提升 66%,比 L_1 自適應控制器提升 42%,比增量非線性動態反演(INDI)控制器提升 35%。所有這些結果都是使用標準四旋翼無人機硬件完成的,同時運行 PX4 的默認調節姿態控制。
即使與沒有外部風干擾和使用更復雜硬件的相關工作(比如需要 10 倍控制頻率和使用直流電動機速度反饋的板載光學傳感器)相比,Neural-Fly 的跟蹤性能也具有競爭力。
下表 1 為不同方法在不同風況下的誤差跟蹤統計。
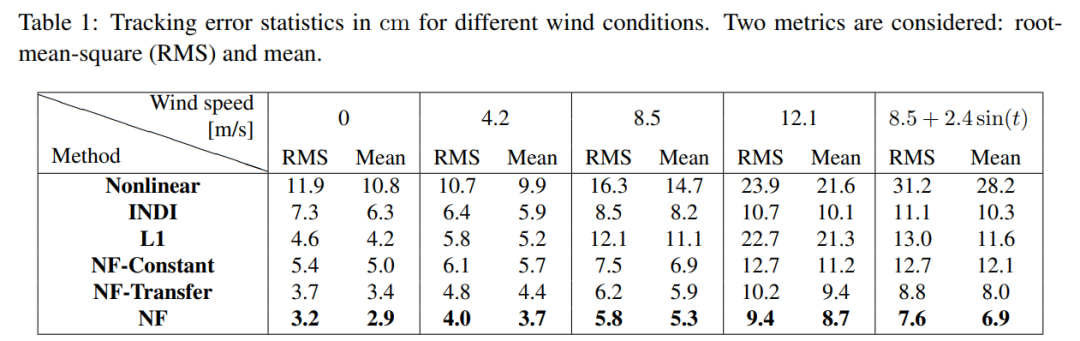
研究者將 Neural-Fly 與兩個變體進行了比較,它們分別是 Neural-Fly-Transfer 和 Neural-Fly-Constant。其中,NF-Transfer 使用從不同無人機的數據上訓練學得的表示,而 NF-Constant 僅使用具有 trivial 非學習基礎的自適應控制律。
Neural-Fly-Transfer 表明了對無人機配置變化和模型不匹配的穩健性,NF-Constant、L_1 和 INDI 方法都直接適應未知動力學,而不假設底層物理結構,它們具有相似的性能。
最后,研究者證明 Neural-Fly 能夠實現一系列功能,允許無人機在狂風條件下遵循軌跡敏捷地飛過低高度門,具體如下圖 1 所示。