













Python正面硬剛C語言,結果會怎樣?
雷達數據可視化是雷達數據處理的最后階段,通常是將一個二維數組的數據轉換為扇形圖像。這個二維數組的行數對應著雷達的掃描半徑,掃描半徑越大,行數越多;數據的列數和雷達的掃描角度相關,掃描角度越大,列數越多。
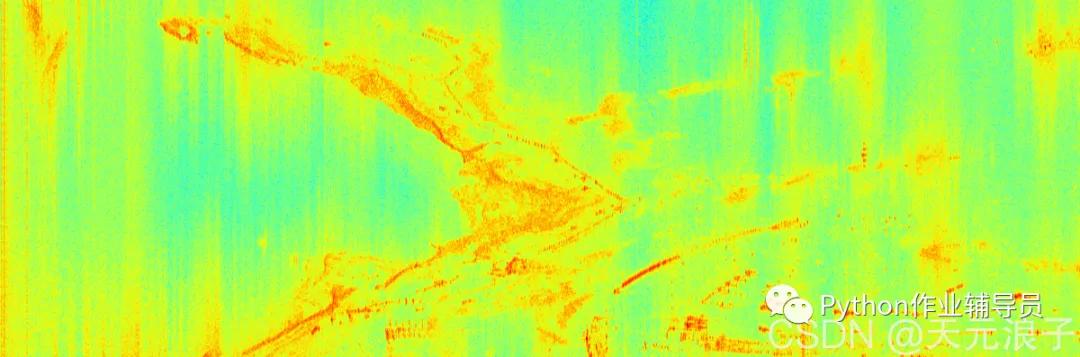
雷達掃描數據樣例(掃描半徑1km,掃描范圍130°)
比如,上面這張圖就是一個掃描半徑1km、掃描范圍130°的雷達二維數據的直觀顯示,下面這張圖則是由這個數據轉換得到的扇形圖像。
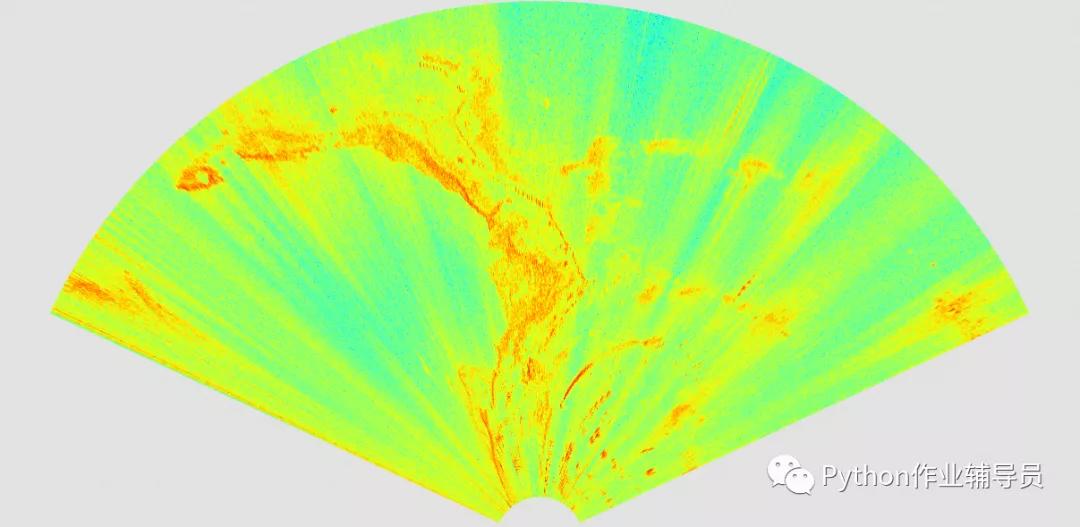
原始數據轉扇形圖像(順時針掃描,初始相位155°)
二維數據轉扇形圖像的原理很簡單,就是將二維數據的每一列寫到輸出圖像的對應像素上。如果輸出圖像的扇形弧長比原始數據的列數多,則需要插值。下圖是二維數據轉扇形圖像的原理示意圖,原始數據共有8列,而輸出圖像的圓弧長24個像素(弧長取決于雷達掃描角度和掃描半徑),故每一列數據被重復操作了3次,每次的旋轉角度各不相同。
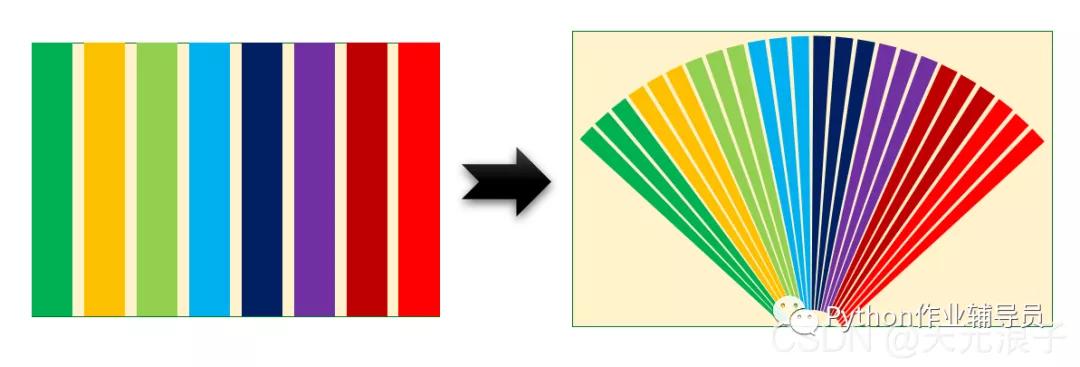
二維數據轉扇形圖像原理示意圖
近日有網友求援,要我幫忙優化一個用于雷達數據可視化的Python腳本。略作分析之后,基于二維數據轉扇形圖像的基本原理,我為求援的網友重寫了一個新的腳本文件,全部代碼大約50余行。
- # -*- coding:utf-8 -*-
- import os, time
- import numpy as np
- from PIL import Image
- def outimg(fn_squ, fn_fan, angle, r0=0, phase=180, cw=True):
- """將矩形圖像轉為環形
- fn_squ - 輸入文件名
- fn_fan - 輸出文件名
- angle - 環形夾角度數
- r0 - 環形內圓半徑,默認r0為0,輸出扇形
- phase - 初始相位(原點在輸出圖像的中心,以指向右側的水平線為0°,逆時針方向為正)
- cw - 順時針掃描
- """
- im = np.array(Image.open(fn_squ)) # 讀圖像文件為NumPy數組
- h, w, d = im.shape # 矩形圖像的高度、寬度和通道數
- r1 = h + r0 # 扇形半徑
- k = int(np.ceil(np.radians(angle)*r1/w)) # 插值系數(自動確定,無需修改)
- xs = np.ones((2*r1-1, 2*r1-1), dtype=np.int32) * -1 # 列索引數組
- ys = np.ones((2*r1-1, 2*r1-1), dtype=np.int32) * -1 # 行索引數組
- rs = np.linspace(r1, r0, h) # 半徑序列
- hs = range(h) # 行序列
- if cw: # 順時針掃描
- theta = np.radians(np.linspace(phase, phase-angle, k*w))
- else: # 逆時針掃描
- theta = np.radians(np.linspace(phase, phase+angle, k*w))
- for i in range(k*w):
- x = np.int32(np.cos(theta[i])*rs) + r1 - 1
- y = -np.int32(np.sin(theta[i])*rs) + r1 + 1
- xs[(y, x)] = i//k
- ys[(y, x)] = hs
- im_fan = im[(ys, xs)] # 從原始數據得到扇形圖像數據
- im_fan[np.where(xs == -1)] = (0,0,0,0) # 空白部分置為透明
- Image.fromarray(im_fan).save(fn_fan) # 保存為文件
- if __name__ == '__main__':
- fn_squ = 'res/raw_d130_1km.png'
- fn_fan = 'res/fan_d130_1km.png'
- t0 = time.time()
- outimg(fn_squ, fn_fan, angle=130, r0=100, phase=155, cw=True)
- t1 = time.time()
- print('圖像已處理完并保存,耗時%d毫秒'%int((t1-t0)*1000))
使用上面展示的掃描半徑1km、掃描范圍130°的雷達二維數據(可直接下載圖像文件作為測試數據),這段代碼生成扇形圖像大約耗時1.6秒鐘。發給求援的網友之后,很快傳來了反饋消息:新的腳本不但可以正常運行,速度更是提升了20倍左右。略帶夸張的千恩萬謝之后,這位網友又說,他們原本對優化沒有抱多大期望,只想嘗試一下;如果優化結果不理想的話,打算用C替換這個腳本的;現在好了,處理速度足可滿足需求,無需再用C重寫了。
幫忙的事情算是圓滿結束了,但這位網友的話卻讓我萌生了一個想法:用C來實現同樣的功能,究竟會比Python快多少呢?平時總聽到很多人說,Python如何如何慢,何不借此問題,讓Python和C來一個正面較量呢?
坐而論道,不如起而行之。幾個小時之后,我寫完了下面這段同樣是實現二維數據轉扇形圖像的C代碼。其中加載圖像文件和保存圖像文件,借用了GitHub上的一個C/C++圖像庫。這個名為stb的圖像庫,并非無名之輩,單是Contributors就有188人之多,持續開發近10年之久,圈內也算小有名氣。若要運行下面的代碼,請先去stb的GitHub(https://github.com/nothings/stb/)下載stb_image.h和stb_image_write.h兩個頭文件。
- #include <stdio.h>
- #include <stdlib.h>
- #include <windows.h>
- #define _USE_MATH_DEFINES
- #include <math.h>
- #define STB_IMAGE_IMPLEMENTATION
- #include "stb_image.h"
- #define STB_IMAGE_WRITE_IMPLEMENTATION
- #include "stb_image_write.h"
- int main() {
- LARGE_INTEGER li;
- LONGLONG startTime, stopTime, freq;
- QueryPerformanceFrequency(&li);
- freq = li.QuadPart;
- QueryPerformanceCounter(&li);
- startTime = li.QuadPart; // 記錄開始時間
- char* rawFile = "D://MyCcode//RadoData2Image//res//raw_d130_1km.png";
- char* outFile = "D://MyCcode//RadoData2Image//res//fan_d130_1km.png";
- int w_raw = 0, h_raw = 0, chn = 0;
- unsigned char* radoData = stbi_load(rawFile, &w_raw, &h_raw, &chn, 0);
- int r0 = 100, cw = 1, r1 = h_raw + r0;
- double angle = 130.0, phase = 155.0;
- int w_out = 2*r1 - 1, h_out = 2*r1 - 1;
- int size_out = w_out * h_out * chn;
- int k = (int)(ceil((M_PI*angle/180.0)*w_out/w_raw));
- int arc = k * w_raw;
- double step = angle/(arc-1);
- char* fanData;
- fanData = (char*)malloc(size_out); // 生成保存轉換結果的數組
- for (int i=0; i<size_out; ++i) {
- fanData[i] = 0; // 初始化像素,全部透明
- }
- double theta, sinv, cosv;
- int x, y, col_raw, pos_raw, pos_out;
- for (int i=0; i<arc; i++) {
- if (cw == 1)
- theta = M_PI * (phase - i*step) / 180.0;
- else
- theta = M_PI * (phase + i*step) / 180.0;
- sinv = sin(theta);
- cosv = cos(theta);
- col_raw = i/k;
- for (int r=r0; r<r1; r++) {
- x = (int)(cosv*r) + r1 - 1;
- y = -(int)(sinv*r) + r1 + 1;
- pos_out = (y * h_out + x) * chn;
- pos_raw = ((h_raw - 1 - r + r0) * w_raw + col_raw) * chn;
- for (int j=0; j<4; j++)
- fanData[pos_out+j] = radoData[pos_raw+j];
- }
- }
- // 將轉換結果保存為文件
- stbi_write_png(outFile, w_out, h_out, chn, fanData, 0);
- QueryPerformanceCounter(&li);
- stopTime = li.QuadPart; // 記錄結束時間
- int costTime =(int)((stopTime-startTime)*1000/freq);
- printf("Time cost: %d ms\n", costTime);
- return 0;
- }
激動人心的時刻終于到了,我迫不及待地點擊了“構建并運行”按鈕。看起來一切順利,屏幕迅速滾動并最終定格。
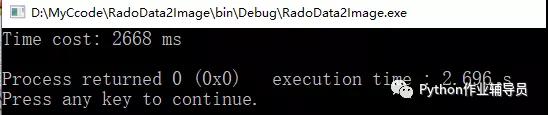
C代碼運行截圖
什么?2668毫秒?竟然比Python慢了1000毫秒?不可能!!!直覺告訴我,一定是哪里出現了問題。接下來我又花了幾個小時,反復檢查驗證,但結果和過程都沒有發現問題。下表是10次運行結果的耗時記錄,結果顯示,在相同的測試條件下,Python平均耗時1660毫秒,C平均耗時2582毫秒,Python耗時大約是C的64%。
| No. | Python | C |
|---|---|---|
| 1 | 1635ms | 2596ms |
| 2 | 1652ms | 2599ms |
| 3 | 1696ms | 2609ms |
| 4 | 1673ms | 2557ms |
| 5 | 1633ms | 2550ms |
| 6 | 1632ms | 2584ms |
| 7 | 1626ms | 2567ms |
| 8 | 1729ms | 2603ms |
| 9 | 1642ms | 2562ms |
| 1 | 1691ms | 2593ms |
| 平均 | 1660ms | 2582ms |
盡管不可思議,但我現在開始嘗試相信這個結果了。讀者您呢?要是有疑問或建議,歡迎留言。如有更加高效的Python代碼或著C代碼,請發私信給我,讓我們一起將這場Python和C語言的正面交鋒延續下去、延伸開來。




















