自動駕駛的困境與選擇
過去幾年,人們對自動駕駛汽車產生了極大的熱情。這的確在情理之中。自動駕駛汽車有望帶來影響深遠的好處:提高燃油效率、縮短行車時間、提高乘客體驗和工作效率,讓可能無法開車的老人和殘疾人自由駕駛,以及最重要的提高道路安全。
盡管人們萬分期待一款價格合理的全自動駕駛汽車,但技術復雜性、成本和監管挑戰將自動駕駛汽車成為主流的時間一再推遲。智能化、自動化、移動計算平臺……這些關鍵詞承載著我們對未來汽車的想象。汽車制造行業的所有參與者正推動著這場變革。
如果你問:2022年會發生什么?這誰知道?
但有一點可以肯定:2022,汽車行業的軍備競賽將快速升級。
如火如荼的算力競賽
曾幾何時,博世、大陸、德爾福、采埃孚……這些國際巨頭一級供應商是令自主品牌車企仰望的存在。它們把控著整車上最核心的技術,擁有著絕對的議價能力,甚至他們的開發進度直接決定了車型的研發周期。從動力總成到底盤,在這些傳統汽車電子產品上,巨頭Tier 1們擁有無可匹敵的競爭力。
而到了自動駕駛時代,巨頭Tier 1們的這套打法漸漸開始失效了,因為它們露出了一個共同的破綻——算法能力不足。
ADAS這兩年進入高光時刻,除了云端居壟斷地位的英偉達,華為、高通等巨頭的入局,亦或地平線、黑芝麻的競爭,甚至寒武紀跑步進入都引起了業界極大關注。算力的不斷提升,也讓各大車企對進入算力的“軍備競賽”產生焦慮。
這場算力“軍備賽”的背后,最為直接的驅動力在于,車企原有的計算平臺(芯片)的算力不足問題逐步凸顯:
- 一方面,各大車廠正在全力備戰高級自動駕駛的量產,多傳感器融合已經成為高階自動駕駛應對復雜場景與安全冗余的必然趨勢。處理這些數據需要非常強大的計算能力,L2級自動駕駛的算力要求大概是10+TOPS,但是到了L4/L5級自動駕駛算力則需要達到1000+TOPS,同比翻了100倍
- 另一方面,包括安波福、博世等Tier1巨頭,以及大眾、寶馬等車企開始探索新型的電子電氣架構,傳統分布式的汽車電子電氣架構正在向域集中式架構演進,從而帶動了高性能大算力芯片的需求急劇上漲
現階段,汽車產業在芯片廠家的推動下進入了算力比拼時代:
- 英偉達最新一款智能汽車和自動駕駛汽車芯片組——DRIVE Atlan,單顆芯片的算力能夠達到1000TOPS,將應用于L4及L5級別自動駕駛
- 特斯拉推超級計算機Dojo,使用720個80GB版本的8x A100節點構建的超級計算機,總算力達到了1.8EFLOPS(EFLOPS:每秒千萬億次浮點運算),有10PB的存儲空間,讀寫速度為1.6TBps
- 黑芝麻華山二號A1000 Pro,算力達到106(INT8)—196TOPS(INT4),單顆芯片可以支持高級別自動駕駛功能
- 地平線推出面向高級別自動駕駛的征程5,算力最高達到128TOPS,支持16路高清攝像頭,實際性能超過特斯拉FSD
- 寒武紀跑步進入自動駕駛領域,將發布一款算力超200TOPS智能駕駛芯片

一場算力競賽已經在各大芯片企業之間悄然興起,追求TOPS算力真的有那么重要嗎?
是不是堆疊芯片的算力,就能達到目的了?
業內似乎進入了“唯算力論”的誤區。
算力堆不出自動駕駛
不可否認,隨著ADAS、自動駕駛技術的興起,以及軟件定義汽車的逐步深入,智能汽車對于計算能力和海量數據處理能力等的需求暴增,傳統汽車的芯片“堆疊”方案已經無法滿足自動駕駛的算力需求。
作為現代科技工業中的集大成者和數字經濟基礎設施的芯片,匯集了最復雜、最尖端、最精密的基礎性技術,以及高端人才和資金,無疑是未來爭奪的焦點。
芯片最終是為車企的車載計算平臺服務的。行業需要思考一個問題是:在“軟件定義汽車”的情況下,解決智能駕駛系統計算平臺的支撐問題,是否只能通過芯片算力堆疊來實現?
是不是唯芯片算力馬首是瞻呢?顯然不是。
提升硬件很重要,但不能陷入“唯算力論”的怪圈。
我們說“數據是生產資料”,而提供處理數據的芯片是工具,不可能工具反客為主成為核心。工具是必備的,但是更重要的核心是跑在上面的軟件。
芯片就是軟件的舞臺,衡量芯片優劣的標準,要看芯片之上的軟件能否最大化地發揮作用。當然不是說算力不重要,算力和軟件之間需要有效匹配。兩款相同算力的芯片比較,能讓軟件運行得更高效的芯片才是“好芯片”。
決定算力真實值最主要因素是內存( SRAM和DRAM)帶寬,還有實際運行頻率(即供電電壓或溫度),以及算法的batch尺寸。
- 谷歌第一代TPU,理論值為90TOPS算力,最差真實值只有1/9,也就是10TOPS算力,因為第一代內存帶寬僅34GB/s
- 第二代TPU下血本使用了HBM內存,帶寬提升到600GB/s(單一芯片,TPU V2板內存總帶寬2400GB/s)
- 最新的英偉達的A100使用40GB的2代HBM,帶寬提升到1600GB/s,比V100提升大約73%
- 特斯拉是128 bitLPDDR4-4266,內存的帶寬:2133MHz*2DDR*128bit/8/1000=68.256GB/s。比第一代TPU略好(這些都是理論上的最大峰值帶寬)其性能最差真實值估計是2/9。也就是大約8TOPS
為什么會這樣?這就牽涉到MAC計算效率問題。
如果你的算法或者說CNN卷積需要的算力是1TOPS,而運算平臺的算力是4TOPS,那么利用效率只有25%,運算單元大部分時候都在等待數據傳送,特別是batch尺寸較小時候,這時候存儲帶寬不足會嚴重限制性能。但如果超出平臺的運算能力,延遲會大幅度增加,存儲瓶頸一樣很要命。效率在90-95%情況下,存儲瓶頸影響最小,但這并不意味著不影響了,影響依然存在。然而平臺不會只運算一種算法,運算利用效率很難穩定在90-95%。這就是為何大部分人工智能算法公司都想定制或自制計算平臺的主要原因,計算平臺廠家也需要推出與之配套的算法,軟硬一體,實難分開。
自動駕駛之爭實質上一場軟硬平臺之戰。單顆芯片算力TOPS是關鍵指標,但并非唯一,自動駕是一個復雜系統,需要車路云邊協同。所以它的較量除了芯還有軟硬協同還有平臺以及工具鏈等等。
自動駕駛芯片的競爭壁壘在于算力利用率和可用性。芯片廠商根據軟件提供底層的硬件支持,在整車設計里提供的價值更高,在供應鏈里的議價能力更強。與Tesla自研汽車中央計算設備相比,軟硬件開放式平臺的解決方案潛力大。
以PC時代的WinTel聯盟為例,在WinTel架構下,Intel芯片和Windows操作系統高度協同,最終才能產生壟斷市場份額的效果,缺一不可。
前百度總裁陸奇博士提出過“母生態”概念,智能汽車將是繼PC、智能手機之后更大的母生態,也是中國汽車行業和科技產業最大的機遇所在。而且,芯片所在的科技產業逐步走向成熟的標志之一就是形成完整的生態。
作為車企來說,還有一個芯片的成本問題。算力有多重要,就有多昂貴。據有關機構評估下來,做一顆車規級的AI芯片,就是L2+、L3的 AI芯片大概成本在5億到7億美金之間,時間是在2~3年。
現在算力的軍備競賽是已經掀起來了,但是芯片的算力本質上對于智能駕駛系統還是必要不充分的條件,現在大家更多提的算力是峰值算力。我們經常會看到一個優化程度不好的芯片宣稱有10TOPS算力,實際跑出來的應用等效只有3~4TOPS的算力。
現在的一種傾向是“L4硬件+L2軟件”,先硬件“預埋”以達標或者超標,軟件上慢慢積累。但是反過來說,這是不是一種浪費?恐怕,還是要對每一個TOPS都要精打細算地使用。
芯片算力的無限膨脹和硬件預埋不會是未來的趨勢,硬件也需要匹配實際,有業內人士就說過:特別是在SoC上,我們需要精準高效的算力來適配電子電氣架構的變革。
此外,車企面對的消費端是不是立刻就需要那么高端的算力呢?也不見得。
自動駕駛算力主要是體現在感知層面的融合,對于L3 100~200已經夠了,對于L4可能需要200~300,更關鍵是怎么用算力,不是說越多越好,如果要做1000,其實是沒有必要的,并且高算力背后是高功耗和低利用率的問題。
高功耗、低利用率日益突出
算力也不能說無限增長,芯片PPA(功耗、成本和面積)都是很要命的。
這是因為,對于車載AI芯片來說,算力指標重要,能效比更重要。在傳統芯片行業,PPA是最經典的性能衡量指標。而現在出于自動駕駛對算力的追求,業界還是把“峰值算力”當作衡量AI芯片的主要指標的話,就導致了一種“唯算力論”的偏頗。
評價一顆芯片的維度來講,其實有這樣幾個指標:
- 性能,即所謂的算力
- 成本
- 功耗
- 易用性,或者是叫易開發性
- 同構性,就是芯片平臺對其他系統的兼容性
功耗和利用率是兩個概念:
- 功耗是如何去平衡整個板載級、芯片級層面功耗。但是對于芯片公司來講,芯片的功耗不僅包括AI部分,因為目前很多芯片都是多核異構的
- 利用率是AI算法優化利用算力的能力。跟每一家神經網絡的架構是有關系的,對于有的大通量、并行計算,它的利用率一定是有天花板的
- 在ASIC方案中,每一家的架構是不一樣的,算法也不盡相同
- 對于同一個算法在不同的芯片平臺上去跑,算子庫越豐富,算法跨平臺移植的效果就會越好,所以ASIC的利用率一定比GPU要高
以英偉達的芯片為例,它GPU的功耗是最高的。Orin、Xavier的利用率基本上是30%,怎樣優化基本都是30%。不同于英偉達的GPU方案,高通、mobileye、華為,包括國內這些創業公司都走的是ASIC路線。ASIC芯片針對不同的神經網絡模型去優化,基本上可以做到60%~80%之間,好一點的可能會做到80%再高一些。
在手機領域,英偉達基本上敗給了高通,在PC領域,英偉達敗給了Intel。在專業芯片領域,英偉達其實并沒有太多的成功案例和經驗,其實本質上與它整個GPU的生態有關系。當前來看,英偉達所有的開發工具,包括它的算子庫豐富程度,都是非常好的。客戶用英偉達的芯片,除了功耗和利用率之外,別的都特別順手。所以我們現在看到英偉達能夠如日中天的在整個行業里面存在,但是未來在市場中它肯定會往下降。
從利用率、功耗這些關鍵指標上來講,筆者預測:高通可能會在三年之后,2024年2025年這個期間搶走很大一個市場。
同時這也是國內初創企業的一個機會,從這個用戶痛點著手,拿下市場。地平線提出了一個新的方法MAPS(Mean Accuracy-guaranteed Processing Speed,在精度有保障范圍內的平均處理速度),用以評估芯片的AI真實性能。而在業內沒有統一的測評標準情況下,目前還只能算是一家之言。
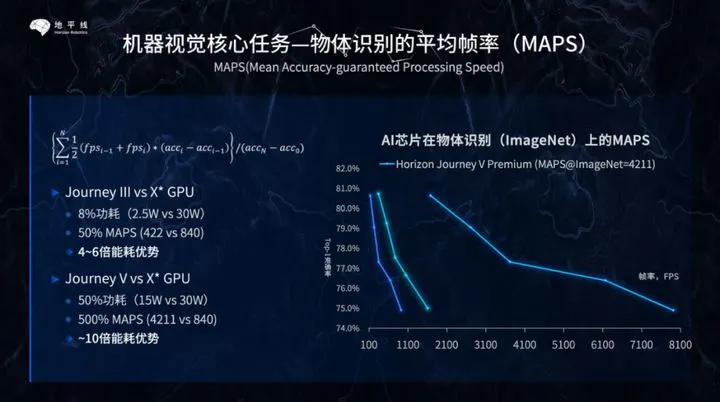
不過功耗方面地平線還是有巨大優勢的。以地平線2020年最先商用量產的征程2芯片為例,它搭載自主研發的計算架構BPU2.0(Brain Processing Unit),可提供超過4TOPS的等效算力,典型功耗僅2瓦,而且,每TOPS的AI能力輸出可達同等算力GPU的10倍以上。
對于車企來說,在最高性能模式下,如果自動駕駛控制器的芯片功耗級別較高,即便其自身性能強勁,但也會引發某些不可預知的隱患,如發熱量成倍增加,耗電率成倍增加,這些結果對于智能電動車來說毫無疑問是顆“雷”。
高算力AI芯片的致命一擊
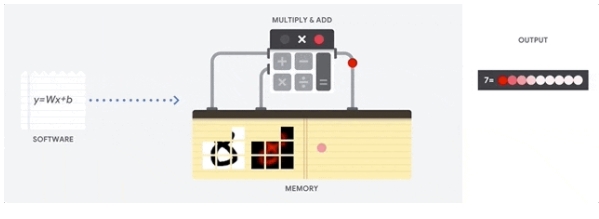
當今自動駕駛領域所運用的視覺識別算法,基本上都基于卷積神經網絡,視覺算法的運算本質上是一次次的卷積運算。這種計算并不復雜,本質上只涉及到加減乘除,也就是一種乘積累加運算。但這種簡單運算在卷積神經網絡中是大量存在的,這就對處理器的性能提出了很高的要求。
以ResNet-152為例,這是一個152層的卷積神經網絡,它處理一張224*224大小的圖像所需的計算量大約是226億次,如果這個網絡要處理一個1080P的30幀的攝像頭,他所需要的算力則高達每秒33萬億次,十分龐大。
實際上自動駕駛領域99%的視覺數據在AI處理中是無用的背景。這就好像檢測鬼探頭,變化的區域是很小一部分,但傳統的視覺處理仍然要處理99%的沒有出現變化的背景區域,這不僅浪費了大量的算力,也浪費了時間。亦或者像在沙礫里有顆鉆石,AI芯片和傳統相機需要識別每一顆沙粒,篩選出鉆石,但人類只需要看一眼就能檢測到鉆石,AI芯片和傳統相機耗費的時間是人類的100倍或1000倍。
事件相機的工作機制是,當某個像素所處位置的亮度發生變化達到一定閾值時,相機就會回傳一個上述格式的事件,其中前兩項為事件的像素坐標,第三項為事件發生的時間戳,最后一項取值為極性(polarity)0、1(或者-1、1),代表亮度是由低到高還是由高到低,也常被稱作Positive or Negative Event,又被稱作On or Off Event。
就這樣,在整個相機視野內,只要有一個像素值變化,就會回傳一個事件,這些所有的事件都是異步發生的(再小的時間間隔也不可能完全同時),所以事件的時間戳均不相同,由于回傳簡單,所以和傳統相機相比,它具有低時延的特性,可以捕獲很短時間間隔內的像素變化,延遲是微秒級的。
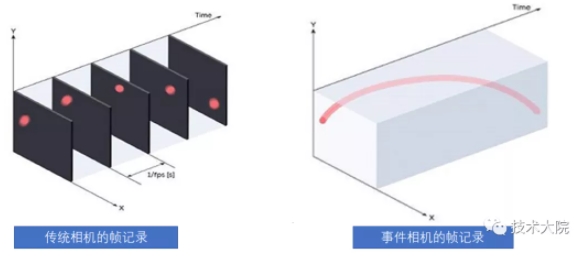
事件相機的靈感來自人眼和動物的視覺,也有人稱之為硅視網膜。生物的視覺只針對有變化的區域才敏感,比如眼前突然掉下來一個物體,那么人眼會忽視背景,會將注意力集中在這個物體上,事件相機就是捕捉事件的產生或者說變化的產生。在傳統的視覺領域,相機傳回的信息是同步的,所謂同步,就是在某一時刻t,相機會進行曝光,把這一時刻所有的像素填在一個矩陣里回傳,一張照片就誕生了。一張照片上所有的像素都對應著同一時刻。至于視頻,不過是很多幀的圖片,相鄰圖片間的時間間隔可大可小,這便是我們常說的幀率(frame rate),也稱為時延(time latency)。事件相機類似于人類的大腦和眼睛,跳過不相關的背景,直接感知一個場景的核心,創建純事件而非數據。
除了冗余信息減少和幾乎沒有延遲的優點外,事件相機的優點還有由于低時延,在拍攝高速物體時傳統相機會發生模糊(由于會有一段曝光時間),而事件相機幾乎不會。再就是真正的高動態范圍,由于事件相機的特質,在光強較強或較弱的環境下(高曝光和低曝光),傳統相機均會“失明”,但像素變化仍然存在,所以事件相機仍能看清眼前的東西。
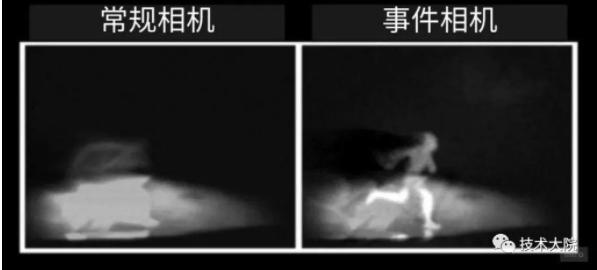
傳統相機的動態范圍是無法做寬的,因為放大器會有線性范圍,照顧了低照度就無法適應強光,反過來適應了強光就無法顧及低照度。事件相機在目標追蹤、動作識別等領域具備壓倒性優勢,尤其適合自動駕駛領域。
空中一個球的軌跡,

扔一個球,看看兩種相機的軌跡記錄:
事件相機的出現對高算力AI芯片是致命打擊,它只需要傳統高算力AI芯片1%甚至0.1%的算力就可完美工作,功耗是毫瓦級。事件相機基于流水線時間戳方式處理數據,而不是一幀幀地平面處理各個像素。傳統卷積算法可能無用,AI芯片最擅長的乘積累加運算可能沒有用武之地。為了準確檢測行人并預測其路徑,需要多幀處理,至少是10幀,也就是330毫秒。這意味著相關系統可能需要數百毫秒才能實現有效探測,而對于一輛以60公里每小時行進中的車輛來說,330毫秒的時間就能行駛5.61米,而事件相機理論上不超過1毫秒。
技術路線展望
中國自動駕駛正在顯示出三條主流技術路線:
- 特斯拉路線:純視覺路線,特斯拉芯片+特斯拉算法+視覺傳感器
- 英偉達路線:融合感知路線,英偉達芯片+多種傳感器+OEM自研算法
- 華為路線:融合感知路線,華為芯片+華為算法+多種傳感器
特斯拉目前最頂配的FSD,8個攝像頭的分辨率只有130萬像素,就已經需要144TOPS的算力,而目前英偉達的自動駕駛試驗車型用的攝像頭已經是800萬像素,因此1000TOPS的算力是必須的,如此大的算力不僅帶來高成本,還有高熱量。除非能挖礦,否則是太浪費了。
今年1月初,瑞典初創公司Terranet宣布斬獲了來自汽車產業巨頭戴姆勒梅賽德斯奔馳的Voxelflow原型采購訂單,訂單價值31000歐元。這筆采購訂單是Terranet和戴姆勒于2020年10月簽署的諒解備忘錄(MoU)的延續,雙方的諒解備忘錄涉及ADAS和防撞解決方案的原型驗證、產品開發和產業化。下一步是將VoxelFlow集成到奔馳的測試車輛中。實際Terranet的核心是基于事件的圖像傳感器(Event-based Camera Sensor,或Event-driven Camera Sensor)。
事件相機仍然無法取代激光雷達或雙目系統,因為它無法提供深度信息,因此事件相機必須配合激光雷達才能實現完美的3D感知。VoxelFlow技術能夠憑借很低的算力,以極低的延時對動態移動物體進行分類。每秒可以生成1000萬個3D點云,提供沒有運動模糊的快速邊緣檢測。基于事件的傳感器的超低延時性能,能夠確保車輛及時應對“鬼探頭”問題,采取緊急制動、加速或繞過突然出現在車輛后方的物體以避免碰撞事故。
現在的AI本質上還是一種蠻力計算,依靠海量數據和海量算力,對數據集和算力的需求不斷增加,這顯然離初衷越來越遠,文明的每一次進步都帶來效率的極大提高,唯有效率的提高才是進步,而依賴海量數據和海量算力的AI則完全相反,效率越來越低,事件相機才是正確的方向。