













地圖、GPS不靠譜也無妨,UC伯克利機器人陌生環境導航超三公里

大多數機器人導航方式與多數人類導航方式截然不同。當機器人對環境有全面的了解,并對周圍的一切進行完整的幾何重建以及準確了解自身位置和方向時,它們表現最好。激光雷達、預先存在的地圖、強大的計算機,甚至是動作捕捉系統,可以說,自主機器人的「需求」永無止境。
但很顯然,這些東西并不能很好地擴展,當然也可能是研究負擔不起。
考慮到這些,在近期一篇論文《ViKiNG: Vision-Based Kilometer-Scale Navigation with Geographic Hints》中,UC 伯克利分校的人工智能博士生 Dhruv Shah 及其導師 Sergey Levine 探索了一種不同的機器人導航方式。他們主張機器人導航中消除高端耗能的組件,只需要一個單目相機、一些神經網絡、一個基礎的 GPU 系統以及一些以人類可讀的非常基礎的俯視圖形式的簡單提示就足夠了。
這樣的提示聽起來可能沒有那么有影響力,但它們使一個非常簡單的機器人能夠高效、智能地穿越陌生環境,到達遙遠的目的地。
- 論文地址:https://arxiv.org/pdf/2202.11271.pdf
- 項目主頁:https://sites.google.com/view/viking-release
具體而言,該研究提出了一種基于學習的方法,即將學習和規劃集成起來,并且可以利用諸如示意路線圖、衛星地圖和 GPS 坐標等輔助信息作為規劃啟發式。ViKiNG 結合了一個局部可遍歷性模型,該模型可以查看機器人當前基于相機的觀察結果和一個潛在子目標,以推斷到達子目標難易程度。
此外,ViKiNG 還包括一個啟發式模型,該模型查看俯視圖并嘗試估計各種子目標到目的地的距離。ViKiNG 不執行顯式幾何重建,只利用環境的拓撲表示。
盡管在 ViKiNG 訓練數據集中從未見過超過 80 米的軌跡,但其可以利用基于圖像的學習控制器和目標導向啟發式(goal-directed heuristic),在以前沒見過的環境中導航到最遠 3 公里以外的目標,并表現出復雜的行為。ViKiNG 對不可靠的地圖和 GPS 也有很強的魯棒性,因為底層控制器最終基于自身圖像觀察做出決策,而地圖僅作為規劃的啟發式。
ViKiNG 機器人的導航是這樣的:
ViKiNG 簡介
如果那個小機器人看起來很眼熟,那是因為我們幾年前通過 Levine 的學生 Greg Khan 認識了它。當時,這個機器人被命名為 BADGR,它的特殊技能是學習根據簡單的圖像和生活經驗在新的環境中導航 —— 或者任何與生活經驗相當的機器人。

ViKiNG的前身BADGR。BADGR 現在已經演變成 ViKiNG,它代表帶有地理提示的基于視覺的公里級導航。雖然 BADGR 可以自由的在小區域四處行走,但它的繼任者 ViKiNG 旨在穿越長距離尋找目標,這是邁向實際應用的重要一步。
導航,非常廣泛地,包括了解你在哪里,你想去哪里,以及你想如何到達那里。對于機器人來說,這相當于一個長期目標。一些遙遠的 GPS 坐標可以通過實現一系列短期目標來達到,例如在接下來的幾米內停留在特定路徑上。達到足夠的短期目標,你就達到了你的長期目標。但其中也有一種中期目標,這尤其棘手,因為它涉及對最佳路徑可能是什么做出更復雜和抽象的決定。或者,換句話說,哪種短期目標組合最適合實現長期目標的使命。
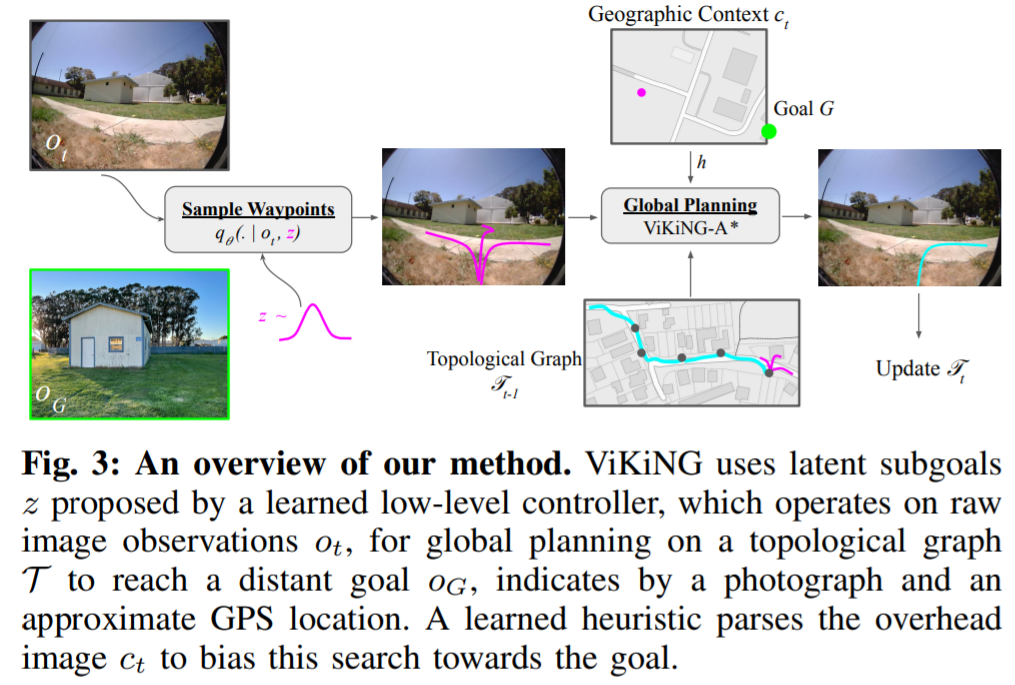
方法概述。
這就是 ViKiNG 的提示所在。使用衛星地圖或路線圖,機器人可以就短期目標做出更明智的選擇,從而大大增加實現目標的可能性。即使有了路線圖,ViKiNG 也不局限于道路;它只是可能有利于道路,因為這就是它所擁有的信息。衛星圖像,包括道路和其他地形,為機器人提供了更多信息。這些地圖是提示,而不是說明,這意味著 ViKiNG 可以適應它沒有預料到的障礙。當然,地圖無法準確地告訴機器人在更小的范圍內去哪里(這些短期目標是否可以穿越),但 ViKiNG 可以通過其單目相機自行處理。
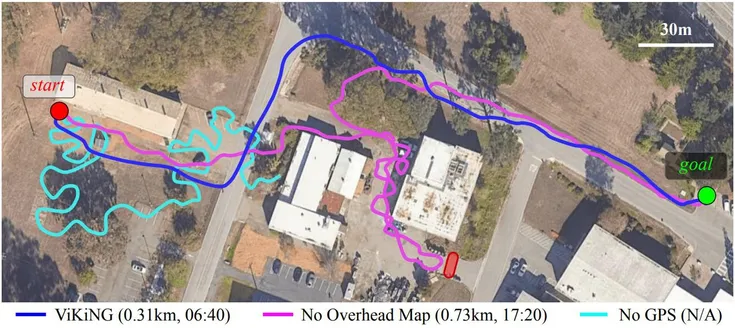
ViKiNG 性能令人驚艷,正如你在圖中看到的,藍色的線為 ViKiNG 導航路徑,綜合來看這是通往目標的最佳路線。值得一提的是,研究者沒有為 ViKiNG 提供周圍環境地圖,它通過基本的 GPS 完成這項任務,此外,你還需要提供一張照片、目標 GPS 坐標、單目相機和地圖。上圖顯示了機器人正在穿越一條短路徑,ViKiNG 可以自主導航。
論文通訊作者、UC 伯克利分校助理教授、強化學習大牛 Sergey Levine 表示:這項研究令人興奮,因為整個過程都非常簡單。與自動駕駛系統使用大量軟件棧和交互組件不同,該系統使用兩個神經網絡(一個處理第一人稱圖像,一個處理地圖圖像)和一個規劃算法來決定機器人行走路徑。

可以說這項研究意義重大,因為當今機器人導航系統非常復雜,不能進行大規模部署。如果簡單的基于學習的系統能夠匹配或超過復雜的手工設計方法,這可能會為未來機器導航應用指明道路。





























