













使用PyTorch實現去噪擴散模型
在深入研究去噪擴散概率模型(DDPM)如何工作的細節之前,讓我們先看看生成式人工智能的一些發展,也就是DDPM的一些基礎研究。

VAE
VAE 采用了編碼器、概率潛在空間和解碼器。在訓練過程中,編碼器預測每個圖像的均值和方差。然后從高斯分布中對這些值進行采樣,并將其傳遞到解碼器中,其中輸入的圖像預計與輸出的圖像相似。這個過程包括使用KL Divergence來計算損失。VAEs的一個顯著優勢在于它們能夠生成各種各樣的圖像。在采樣階段簡單地從高斯分布中采樣,解碼器創建一個新的圖像。
GAN
在變分自編碼器(VAEs)的短短一年之后,一個開創性的生成家族模型出現了——生成對抗網絡(GANs),標志著一類新的生成模型的開始,其特征是兩個神經網絡的協作:一個生成器和一個鑒別器,涉及對抗性訓練過程。生成器的目標是從隨機噪聲中生成真實的數據,例如圖像,而鑒別器則努力區分真實數據和生成數據。在整個訓練階段,生成器和鑒別器通過競爭性學習過程不斷完善自己的能力。生成器生成越來越有說服力的數據,從而比鑒別器更聰明,而鑒別器又提高了辨別真實樣本和生成樣本的能力。這種對抗性的相互作用在生成器生成高質量、逼真的數據時達到頂峰。在采樣階段,經過GAN訓練后,生成器通過輸入隨機噪聲產生新的樣本。它將這些噪聲轉換為通常反映真實示例的數據。
為什么我們需要另一個模型架構
兩種模型都有不同的問題,雖然GANs擅長于生成與訓練集中的圖像非常相似的逼真圖像,但VAEs擅長于創建各種各樣的圖像,盡管有產生模糊圖像的傾向。但是現有的模型還沒有成功地將這兩種功能結合起來——創造出既高度逼真又多樣化的圖像。這一挑戰給研究人員帶來了一個需要解決的重大障礙。
在第一篇GAN論文發表六年后,在VAE論文發表七年后,一個開創性的模型出現了:去噪擴散概率模型(DDPM)。DDPM結合了兩個世界的優勢,擅長于創造多樣化和逼真的圖像。

在本文中,我們將深入研究DDPM的復雜性,涵蓋其訓練過程,包括正向和逆向過程,并探索如何執行采樣。在整個探索過程中,我們將使用PyTorch從頭開始構建DDPM,并完成其完整的訓練。
這里假設你已經熟悉深度學習的基礎知識,并且在深度計算機視覺方面有堅實的基礎。我們不會介紹這些基本概念,我們的目標是生成人類確信其真實性的圖像。
DDPM
去噪擴散概率模型(DDPM)是生成模型領域的一種前沿方法。與依賴顯式似然函數的傳統模型不同,DDPM通過對擴散過程進行迭代去噪來運行。這包括逐漸向圖像中添加噪聲并試圖去除該噪聲。其基本理論是基于這樣一種思想:通過一系列擴散步驟轉換一個簡單的分布,例如高斯分布,可以得到一個復雜而富有表現力的圖像數據分布。或者說通過將樣本從原始圖像分布轉移到高斯分布,我們可以創建一個模型來逆轉這個過程。這使我們能夠從全高斯分布開始,以圖像分布結束,有效地生成新圖像。
DDPM的訓練包括兩個基本步驟:產生噪聲圖像這是固定和不可學習的正向過程,以及隨后的逆向過程。逆向過程的主要目標是使用專門的機器學習模型對圖像進行去噪。
正向擴散過程
正向過程是一個固定且不可學習的步驟,但是它需要一些預定義的設置。在深入研究這些設置之前,讓我們先了解一下它是如何工作的。
這個過程的核心概念是從一個清晰的圖像開始。在用“T”表示的特定步長上,少量噪聲按照高斯分布逐漸引入。

從圖像中可以看出,噪聲是在每一步遞增的,我們深入研究這種噪音的數學表示。
噪聲是從高斯分布中采樣的。為了在每一步引入少量的噪聲,我們使用馬爾可夫鏈。要生成當前時間戳的圖像,我們只需要上次時間戳的圖像。馬爾可夫鏈的概念在這里是關鍵的,并對隨后的數學細節至關重要。
馬爾可夫鏈是一個隨機過程,其中過渡到任何特定狀態的概率僅取決于當前狀態和經過的時間,而不是之前的事件序列。這一特性簡化了噪聲添加過程的建模,使其更易于數學分析。

用beta表示的方差參數被有意地設置為一個非常小的值,目的是在每個步驟中只引入最少量的噪聲。
步長參數“T”決定了生成全噪聲圖像所需的步長。在本文中,該參數被設置為1000,這可能顯得很大。我們真的需要為數據集中的每個原始圖像創建1000個噪聲圖像嗎?馬爾可夫鏈方面被證明有助于解決這個問題。由于我們只需要上一步的圖像來預測下一步,并且每一步添加的噪聲保持不變,因此我們可以通過生成特定時間戳的噪聲圖像來簡化計算。采用對的再參數化技巧使我們能夠進一步簡化方程。

將式(3)中引入的新參數納入式(2)中,對式(2)進行了發展,得到了結果。
逆向擴散過程
我們已經為圖像引入了噪聲下一步就是執行逆操作了。除非我們知道初始條件,即t = 0時的未去噪圖像,否則無法從數學上實現對圖像進行逆向處理去噪。我們的目標是直接從噪聲中采樣以創建新圖像,這里缺乏關于結果的信息。所以我需要設計一種在不知道結果的情況下逐步去噪圖像的方法。所以就出現了使用深度學習模型來近似這個復雜的數學函數的解決方案。
有了一點數學背景,模型將近似于方程(5)。一個值得注意的細節是,我們將堅持DDPM原始論文并保持固定的方差,盡管也有可能使模型學習它。

該模型的任務是預測當前時間戳和前一個時間戳之間添加的噪聲的平均值。這樣做可以有效地去除噪音,達到預期的效果。但是如果我們的目標是讓模型預測從“原始圖像”到最后一個時間戳添加的噪聲呢?
除非我們知道沒有噪聲的初始圖像,否則在數學上執行逆向過程是具有挑戰性的,讓我們從定義后方差開始。

模型的任務是預測從初始圖像添加到時間戳t的圖像的噪聲。正向過程使我們能夠執行這個操作,從一個清晰的圖像開始,并在時間戳t處進展到一個有噪聲的圖像。
訓練算法
我們假設用于進行預測的模型體系結構將是一個U-Net。訓練階段的目標是:對于數據集中的每個圖像,在[0,T]范圍內隨機選擇一個時間戳,并計算正向擴散過程。這產生了一個清晰的,有點噪聲的圖像,以及實際使用的噪聲。然后利用我們對逆向過程的理解,使用該模型來預測添加到圖像中的噪聲。有了真實的和預測的噪聲,我們似乎已經進入了一個有監督的機器學習問題。
最主要的問題來了,我們應該用哪個損失函數來訓練我們的模型呢?由于處理的是概率潛在空間,Kullback-Leibler (KL)散度是一個合適的選擇。
KL散度衡量兩個概率分布之間的差異,在我們的例子中,是模型預測的分布和期望分布。在損失函數中加入KL散度不僅可以指導模型產生準確的預測,還可以確保潛在空間表示符合期望的概率結構。
KL散度可以近似為L2損失函數,所以可以得到以下損失函數:

最終我們得到了論文中提出的訓練算法。

采樣
逆向流程已經解釋完成了,下面就是如何使用了。從時刻T的一個完全隨機的圖像開始,并使用逆向過程T次,最終到達時刻0。這構成了本文中概述的第二種算法

參數
我們有很多不同的參數beta,beta_tildes,alpha, alpha_hat 等等。目前都不知道如何選擇這些參數。但是此時已知的唯一參數是T,它被設置為1000。
對于所有列出的參數,它們的選擇取決于beta。從某種意義上說,Beta決定了我們要在每一步中添加的噪聲量。因此,為了確保算法的成功,仔細選擇beta是至關重要的。其他的參數因為太多,請參考論文。
在原始論文的實驗階段探索了各種抽樣方法。最初的線性采樣方法圖像要么接收到的噪聲不足,要么變得過于嘈雜。為了解決這個問題,采用了另一種更常用的方法,即余弦采樣。余弦采樣提供了更平滑和更一致的噪聲添加。

模型Pytorch實現
我們將利用U-Net架構進行噪聲預測,之所以選擇U-Net,是因為U-Net是圖像處理、捕獲空間和特征地圖以及提供與輸入相同的輸出大小的理想架構。

考慮到任務的復雜性和對每一步使用相同模型的要求(其中模型需要能夠以相同的權重去噪完全有噪聲的圖像和稍微有噪聲的圖像),調整模型是必不可少的。這包括合并更復雜的塊,并通過正弦嵌入步驟引入對所用時間戳的感知。這些增強的目的是使模型成為去噪任務的專家。在繼續構建完整的模型之前,我們將介紹每個塊。
ConvNext塊
為了滿足提高模型復雜度的需要,卷積塊起著至關重要的作用。這里不能僅僅依賴于u-net論文中的基本塊,我們將結合ConvNext。

輸入由代表圖像的“x”和大小為“time_embedding_dim”的嵌入的時間戳可視化“t”組成。由于塊的復雜性以及與輸入和最后一層的殘差連接,在整個過程中,塊在學習空間和特征映射方面起著關鍵作用。
class ConvNextBlock(nn.Module):
def __init__(
self,
in_channels,
out_channels,
mult=2,
time_embedding_dim=None,
norm=True,
group=8,
):
super().__init__()
self.mlp = (
nn.Sequential(nn.GELU(), nn.Linear(time_embedding_dim, in_channels))
if time_embedding_dim
else None
)
self.in_conv = nn.Conv2d(
in_channels, in_channels, 7, padding=3, groups=in_channels
)
self.block = nn.Sequential(
nn.GroupNorm(1, in_channels) if norm else nn.Identity(),
nn.Conv2d(in_channels, out_channels * mult, 3, padding=1),
nn.GELU(),
nn.GroupNorm(1, out_channels * mult),
nn.Conv2d(out_channels * mult, out_channels, 3, padding=1),
)
self.residual_conv = (
nn.Conv2d(in_channels, out_channels, 1)
if in_channels != out_channels
else nn.Identity()
)
def forward(self, x, time_embedding=None):
h = self.in_conv(x)
if self.mlp is not None and time_embedding is not None:
assert self.mlp is not None, "MLP is None"
h = h + rearrange(self.mlp(time_embedding), "b c -> b c 1 1")
h = self.block(h)
return h + self.residual_conv(x)正弦時間戳嵌入
模型中的關鍵塊之一是正弦時間戳嵌入塊,它使給定時間戳的編碼能夠保留關于模型解碼所需的當前時間的信息,因為該模型將用于所有不同的時間戳。
這是一個非常經典的是實現,并且應用在各個地方,我們就直接貼代碼了
class SinusoidalPosEmb(nn.Module):
def __init__(self, dim, theta=10000):
super().__init__()
self.dim = dim
self.theta = theta
def forward(self, x):
device = x.device
half_dim = self.dim // 2
emb = math.log(self.theta) / (half_dim - 1)
emb = torch.exp(torch.arange(half_dim, device=device) * -emb)
emb = x[:, None] * emb[None, :]
emb = torch.cat((emb.sin(), emb.cos()), dim=-1)
return embDownSample & UpSample

class DownSample(nn.Module):
def __init__(self, dim, dim_out=None):
super().__init__()
self.net = nn.Sequential(
Rearrange("b c (h p1) (w p2) -> b (c p1 p2) h w", p1=2, p2=2),
nn.Conv2d(dim * 4, default(dim_out, dim), 1),
)
def forward(self, x):
return self.net(x)
class Upsample(nn.Module):
def __init__(self, dim, dim_out=None):
super().__init__()
self.net = nn.Sequential(
nn.Upsample(scale_factor=2, mode="nearest"),
nn.Conv2d(dim, dim_out or dim, kernel_size=3, padding=1),
)
def forward(self, x):
return self.net(x)時間多層感知器
這個模塊利用它來基于給定的時間戳t創建時間表示。這個多層感知器(MLP)的輸出也將作為所有修改后的ConvNext塊的輸入“t”。

這里,“dim”是模型的超參數,表示第一個塊所需的通道數。它作為后續塊中通道數量的基本計算。
sinu_pos_emb = SinusoidalPosEmb(dim, theta=10000)
time_dim = dim * 4
time_mlp = nn.Sequential(
sinu_pos_emb,
nn.Linear(dim, time_dim),
nn.GELU(),
nn.Linear(time_dim, time_dim),
)注意力
這是unet中使用的可選組件。注意力有助于增強剩余連接在學習中的作用。它通過殘差連接計算的注意機制和中低潛空間計算的特征映射,更多地關注從Unet左側獲得的重要空間信息。它來源于ACC-UNet論文。

gate 表示下塊的上采樣輸出,而x殘差表示在應用注意的水平上的殘差連接。
class BlockAttention(nn.Module):
def __init__(self, gate_in_channel, residual_in_channel, scale_factor):
super().__init__()
self.gate_conv = nn.Conv2d(gate_in_channel, gate_in_channel, kernel_size=1, stride=1)
self.residual_conv = nn.Conv2d(residual_in_channel, gate_in_channel, kernel_size=1, stride=1)
self.in_conv = nn.Conv2d(gate_in_channel, 1, kernel_size=1, stride=1)
self.relu = nn.ReLU()
self.sigmoid = nn.Sigmoid()
def forward(self, x: torch.Tensor, g: torch.Tensor) -> torch.Tensor:
in_attention = self.relu(self.gate_conv(g) + self.residual_conv(x))
in_attention = self.in_conv(in_attention)
in_attention = self.sigmoid(in_attention)
return in_attention * x最后整合
將前面討論的所有塊(不包括注意力塊)整合到一個Unet中。每個塊都包含兩個殘差連接,而不是一個。這個修改是為了解決潛在的過度擬合問題。

class TwoResUNet(nn.Module):
def __init__(
self,
dim,
init_dim=None,
out_dim=None,
dim_mults=(1, 2, 4, 8),
channels=3,
sinusoidal_pos_emb_theta=10000,
convnext_block_groups=8,
):
super().__init__()
self.channels = channels
input_channels = channels
self.init_dim = default(init_dim, dim)
self.init_conv = nn.Conv2d(input_channels, self.init_dim, 7, padding=3)
dims = [self.init_dim, *map(lambda m: dim * m, dim_mults)]
in_out = list(zip(dims[:-1], dims[1:]))
sinu_pos_emb = SinusoidalPosEmb(dim, theta=sinusoidal_pos_emb_theta)
time_dim = dim * 4
self.time_mlp = nn.Sequential(
sinu_pos_emb,
nn.Linear(dim, time_dim),
nn.GELU(),
nn.Linear(time_dim, time_dim),
)
self.downs = nn.ModuleList([])
self.ups = nn.ModuleList([])
num_resolutions = len(in_out)
for ind, (dim_in, dim_out) in enumerate(in_out):
is_last = ind >= (num_resolutions - 1)
self.downs.append(
nn.ModuleList(
[
ConvNextBlock(
in_channels=dim_in,
out_channels=dim_in,
time_embedding_dim=time_dim,
group=convnext_block_groups,
),
ConvNextBlock(
in_channels=dim_in,
out_channels=dim_in,
time_embedding_dim=time_dim,
group=convnext_block_groups,
),
DownSample(dim_in, dim_out)
if not is_last
else nn.Conv2d(dim_in, dim_out, 3, padding=1),
]
)
)
mid_dim = dims[-1]
self.mid_block1 = ConvNextBlock(mid_dim, mid_dim, time_embedding_dim=time_dim)
self.mid_block2 = ConvNextBlock(mid_dim, mid_dim, time_embedding_dim=time_dim)
for ind, (dim_in, dim_out) in enumerate(reversed(in_out)):
is_last = ind == (len(in_out) - 1)
is_first = ind == 0
self.ups.append(
nn.ModuleList(
[
ConvNextBlock(
in_channels=dim_out + dim_in,
out_channels=dim_out,
time_embedding_dim=time_dim,
group=convnext_block_groups,
),
ConvNextBlock(
in_channels=dim_out + dim_in,
out_channels=dim_out,
time_embedding_dim=time_dim,
group=convnext_block_groups,
),
Upsample(dim_out, dim_in)
if not is_last
else nn.Conv2d(dim_out, dim_in, 3, padding=1)
]
)
)
default_out_dim = channels
self.out_dim = default(out_dim, default_out_dim)
self.final_res_block = ConvNextBlock(dim * 2, dim, time_embedding_dim=time_dim)
self.final_conv = nn.Conv2d(dim, self.out_dim, 1)
def forward(self, x, time):
b, _, h, w = x.shape
x = self.init_conv(x)
r = x.clone()
t = self.time_mlp(time)
unet_stack = []
for down1, down2, downsample in self.downs:
x = down1(x, t)
unet_stack.append(x)
x = down2(x, t)
unet_stack.append(x)
x = downsample(x)
x = self.mid_block1(x, t)
x = self.mid_block2(x, t)
for up1, up2, upsample in self.ups:
x = torch.cat((x, unet_stack.pop()), dim=1)
x = up1(x, t)
x = torch.cat((x, unet_stack.pop()), dim=1)
x = up2(x, t)
x = upsample(x)
x = torch.cat((x, r), dim=1)
x = self.final_res_block(x, t)
return self.final_conv(x)擴散的代碼實現
最后我們介紹一下擴散是如何實現的。由于我們已經介紹了用于正向、逆向和采樣過程的所有數學理論,所里這里將重點介紹代碼。
class DiffusionModel(nn.Module):
SCHEDULER_MAPPING = {
"linear": linear_beta_schedule,
"cosine": cosine_beta_schedule,
"sigmoid": sigmoid_beta_schedule,
}
def __init__(
self,
model: nn.Module,
image_size: int,
*,
beta_scheduler: str = "linear",
timesteps: int = 1000,
schedule_fn_kwargs: dict | None = None,
auto_normalize: bool = True,
) -> None:
super().__init__()
self.model = model
self.channels = self.model.channels
self.image_size = image_size
self.beta_scheduler_fn = self.SCHEDULER_MAPPING.get(beta_scheduler)
if self.beta_scheduler_fn is None:
raise ValueError(f"unknown beta schedule {beta_scheduler}")
if schedule_fn_kwargs is None:
schedule_fn_kwargs = {}
betas = self.beta_scheduler_fn(timesteps, **schedule_fn_kwargs)
alphas = 1.0 - betas
alphas_cumprod = torch.cumprod(alphas, dim=0)
alphas_cumprod_prev = F.pad(alphas_cumprod[:-1], (1, 0), value=1.0)
posterior_variance = (
betas * (1.0 - alphas_cumprod_prev) / (1.0 - alphas_cumprod)
)
register_buffer = lambda name, val: self.register_buffer(
name, val.to(torch.float32)
)
register_buffer("betas", betas)
register_buffer("alphas_cumprod", alphas_cumprod)
register_buffer("alphas_cumprod_prev", alphas_cumprod_prev)
register_buffer("sqrt_recip_alphas", torch.sqrt(1.0 / alphas))
register_buffer("sqrt_alphas_cumprod", torch.sqrt(alphas_cumprod))
register_buffer(
"sqrt_one_minus_alphas_cumprod", torch.sqrt(1.0 - alphas_cumprod)
)
register_buffer("posterior_variance", posterior_variance)
timesteps, *_ = betas.shape
self.num_timesteps = int(timesteps)
self.sampling_timesteps = timesteps
self.normalize = normalize_to_neg_one_to_one if auto_normalize else identity
self.unnormalize = unnormalize_to_zero_to_one if auto_normalize else identity
@torch.inference_mode()
def p_sample(self, x: torch.Tensor, timestamp: int) -> torch.Tensor:
b, *_, device = *x.shape, x.device
batched_timestamps = torch.full(
(b,), timestamp, device=device, dtype=torch.long
)
preds = self.model(x, batched_timestamps)
betas_t = extract(self.betas, batched_timestamps, x.shape)
sqrt_recip_alphas_t = extract(
self.sqrt_recip_alphas, batched_timestamps, x.shape
)
sqrt_one_minus_alphas_cumprod_t = extract(
self.sqrt_one_minus_alphas_cumprod, batched_timestamps, x.shape
)
predicted_mean = sqrt_recip_alphas_t * (
x - betas_t * preds / sqrt_one_minus_alphas_cumprod_t
)
if timestamp == 0:
return predicted_mean
else:
posterior_variance = extract(
self.posterior_variance, batched_timestamps, x.shape
)
noise = torch.randn_like(x)
return predicted_mean + torch.sqrt(posterior_variance) * noise
@torch.inference_mode()
def p_sample_loop(
self, shape: tuple, return_all_timesteps: bool = False
) -> torch.Tensor:
batch, device = shape[0], "mps"
img = torch.randn(shape, device=device)
# This cause me a RunTimeError on MPS device due to MPS back out of memory
# No ideas how to resolve it at this point
# imgs = [img]
for t in tqdm(reversed(range(0, self.num_timesteps)), total=self.num_timesteps):
img = self.p_sample(img, t)
# imgs.append(img)
ret = img # if not return_all_timesteps else torch.stack(imgs, dim=1)
ret = self.unnormalize(ret)
return ret
def sample(
self, batch_size: int = 16, return_all_timesteps: bool = False
) -> torch.Tensor:
shape = (batch_size, self.channels, self.image_size, self.image_size)
return self.p_sample_loop(shape, return_all_timesteps=return_all_timesteps)
def q_sample(
self, x_start: torch.Tensor, t: int, noise: torch.Tensor = None
) -> torch.Tensor:
if noise is None:
noise = torch.randn_like(x_start)
sqrt_alphas_cumprod_t = extract(self.sqrt_alphas_cumprod, t, x_start.shape)
sqrt_one_minus_alphas_cumprod_t = extract(
self.sqrt_one_minus_alphas_cumprod, t, x_start.shape
)
return sqrt_alphas_cumprod_t * x_start + sqrt_one_minus_alphas_cumprod_t * noise
def p_loss(
self,
x_start: torch.Tensor,
t: int,
noise: torch.Tensor = None,
loss_type: str = "l2",
) -> torch.Tensor:
if noise is None:
noise = torch.randn_like(x_start)
x_noised = self.q_sample(x_start, t, noise=noise)
predicted_noise = self.model(x_noised, t)
if loss_type == "l2":
loss = F.mse_loss(noise, predicted_noise)
elif loss_type == "l1":
loss = F.l1_loss(noise, predicted_noise)
else:
raise ValueError(f"unknown loss type {loss_type}")
return loss
def forward(self, x: torch.Tensor) -> torch.Tensor:
b, c, h, w, device, img_size = *x.shape, x.device, self.image_size
assert h == w == img_size, f"image size must be {img_size}"
timestamp = torch.randint(0, self.num_timesteps, (1,)).long().to(device)
x = self.normalize(x)
return self.p_loss(x, timestamp)擴散過程是訓練部分的模型。它打開了一個采樣接口,允許我們使用已經訓練好的模型生成樣本。
訓練的要點總結
對于訓練部分,我們設置了37,000步的訓練,每步16個批次。由于GPU內存分配限制,圖像大小被限制為128x128。使用指數移動平均(EMA)模型權重每1000步生成樣本以平滑采樣,并保存模型版本。
在最初的1000步訓練中,模型開始捕捉一些特征,但仍然錯過了某些區域。在10000步左右,這個模型開始產生有希望的結果,進步變得更加明顯。在3萬步的最后,結果的質量顯著提高,但仍然存在黑色圖像。這只是因為模型沒有足夠的樣本種類,真實圖像的數據分布并沒有完全映射到高斯分布。

有了最終的模型權重,我們可以生成一些圖片。盡管由于128x128的尺寸限制,圖像質量受到限制,但該模型的表現還是不錯的。
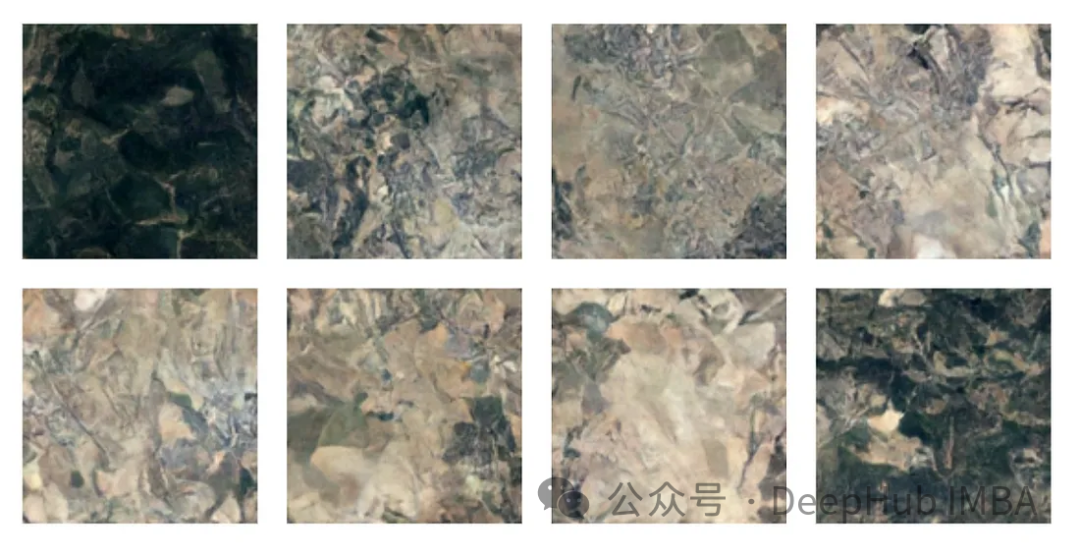
注:本文使用的數據集是森林地形的衛星圖片,具體獲取方式請參考源代碼中的ETL部分。
總結
我們已經完整的介紹了有關擴散模型的必要知識,并且使用Pytorch進行了完整的實現,本文的代碼:
https://github.com/Camaltra/this-is-not-real-aerial-imagery/




























