突破非視距條件依賴!大規模區域、低成本的UWB-LiDAR標定與單次定位框架
本文經3D視覺之心公眾號授權轉載,轉載請聯系出處。
UWB大規模實時工業定位
超寬帶(UWB)是一種短距離、節能的無線電通信技術,主要用于精確的定位檢測和相對距離測量。例如,Apple 的 AirTags 和 Android 的 SmartTags 等設備因其能夠精確追蹤家用物品而越來越受歡迎。
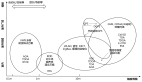
雖然 UWB 在運動跟蹤(如足球比賽)等應用中表現出色,但在大規模實時工業定位應用中仍然面臨重大挑戰。目前,大多數 UWB 研究僅限于較小或室內環境,并以絕對定位(AP)模式運行,如圖 1 所示。在這種條件下,所有基站必須經過標定,并且標簽需要持續從多個基站進行距離測量。然而,在遮擋環境中,這種方式變得不切實際。這樣的限制降低了 UWB 在如港口或倉庫等大規模區域中的實用性,因為這些場景中障礙物顯著增加了技術難度。

在大規模室外環境中使用 UWB 的挑戰主要包括:非視距(NLoS)問題的頻繁出現和其他設備的干擾,這些問題會限制有效的測量范圍。在最糟糕的情況下,由于新加入的集裝箱,基站之間可能完全失去連接(如圖 1 所示)。可靠 GPS 信號的缺乏進一步加劇了標定的復雜性。即便完成標定,在非視距條件下,系統在定位方面仍然困難,成為現場機器人和物流自動化的一個瓶頸。
針對這些問題,本文介紹一種綜合方法【1】,以解決大規模 UWB 標定和單次定位的挑戰。利用連續時間 LiDAR 慣性里程計(CT-LIO)生成可在任意點采樣的軌跡。通過對該軌跡進行插值,我們將每個 UWB 測量值與其對應的位置對齊。然后,使用高斯過程迭代優化基站位置估計。盡管完成標定后,標準 UWB 技術在非視距模式下依然無法定位,為解決此問題,結合了一種基于快速描述符的方法,增強了在大規模重復環境中的單次全局定位能力。我們的方法顯著改進了現有的定位方法,并引入了此前未曾探索的新可能性。
主要貢獻:
- 提出了一種結合 UWB 數據、CT-LIO 和高斯過程的方法,僅需一次采樣便能在大規模環境中精確標定 UWB 基站。這種方法在遮擋和重復環境中顯著提高了定位性能,在 UWB 或 LiDAR 單獨使用均失效的場景中尤為有效。
- 提出了單次定位流程,通過利用已有描述符對 UWB 范圍進行過濾,減少了搜索時間,從而實現了復雜區域中的高效準確定位,不再需要多個 UWB 基站,使得該方案經濟實惠且實用。
- 方法通過真實世界實驗驗證,在600x450 平方米的環境中實現了更高的精度和更短的處理時間,證明了其在具有挑戰性條件下的大規模應用的實用性。
- 將公開數據集和標定代碼,以供社區使用。
問題描述


連續時間 LiDAR-慣性里程計
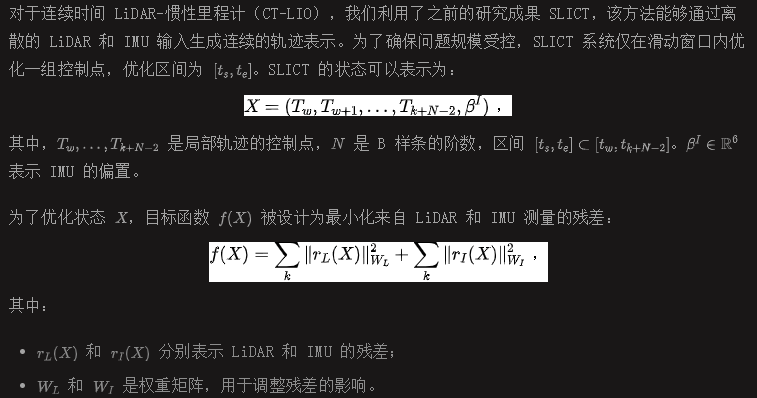
目標函數通過一個基于流形的優化求解器進行最小化,該求解器僅依賴于 Eigen 庫,從而實現最高的計算效率。這種優化方法保證了在指定時間窗口內生成連續時間軌跡,同時處理傳感器輸入中的噪聲和偏差問題。
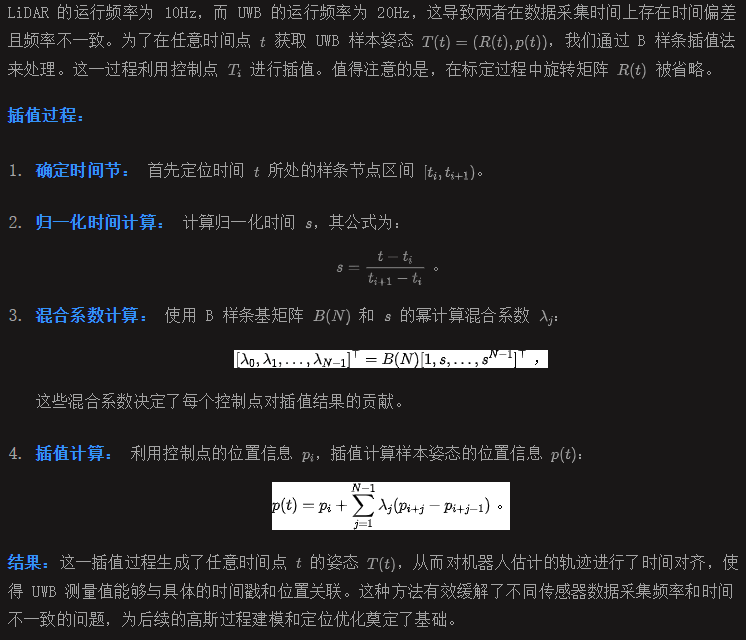
插值的 UWB 姿態
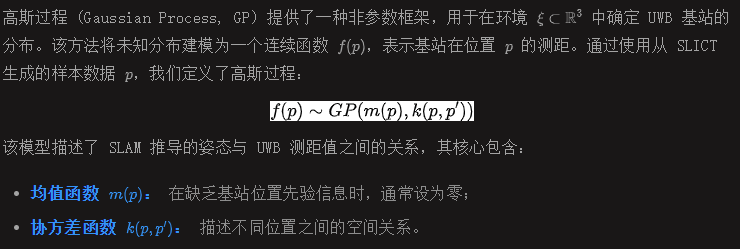
基于高斯過程的 UWB 基站標定
協方差函數
為了準確捕捉空間關系,我們采用了 Matérn 3/2 核函數,其能夠適應空間數據中不同的平滑程度:
其中:
- 是平滑度參數;
- 是長度尺度參數;
- 是修正貝塞爾函數;
- 是伽馬函數。
這些參數根據環境復雜性和數據的變化性進行調整,以提高模型的適應性。
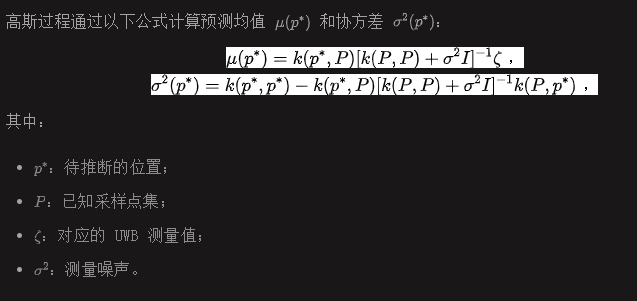
預測方程
標定過程
標定基站位置的具體過程如下:
- 初始擬合: 首先在較粗的尺度上擬合初始點。
- 區域采樣: 在矩形區域內按規則間隔采樣未定義的位置。
- 模型更新: 選取采樣值中前 10 個最佳值的均值,更新高斯過程模型。
- 分層隨機采樣: 確保數據覆蓋整個區域,從而提升泛化能力,并加速收斂。
優勢
通過高斯過程標定 UWB 基站位置,可以實現更高的精度和魯棒性。相比傳統方法,該方法能夠更好地應對復雜和非視距 (NLoS) 環境中的基站標定問題,從而顯著提升整體定位性能。
單次定位
我們對 Stable Triangle Descriptor (STD) 穩定三角形描述符進行了改進,以優先匹配靠近已知 UWB 基站的場景。這種方法通過整合標定后的 UWB 基站位置與 STD 描述符,旨在降低大規模重復環境中的誤匹配率。
改進的 STD 方法
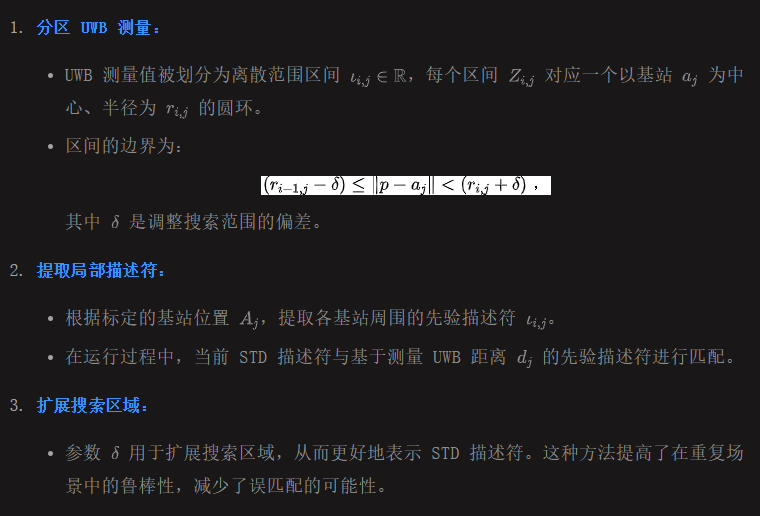
STD 僅依賴三角形描述符來識別場景,但在重復場景中容易出錯。通過將 STD 與標定后的 UWB 數據結合,我們引入了基于范圍的分區搜索來增強定位性能。
單次定位流程
通過改進的 STD 方法,我們實現了以下單次定位流程:
- 預處理: 根據標定的 UWB 基站位置,劃分搜索區域并提取先驗描述符。
- 實時匹配: 使用當前 STD 描述符與預定義區域內的描述符進行匹配。
- 位置推斷: 基于匹配結果,快速定位機器人或目標物體的當前位置。
參數選擇

優勢
與傳統 STD 方法相比,結合 UWB 基站位置的改進方案具有以下優勢:
- 提高準確性: 標定后的基站位置能夠顯著減少重復場景中的誤匹配。
- 增強魯棒性: 即便在非視距 (NLoS) 和復雜環境下,也能保持較高的定位成功率。
- 優化效率: 基于范圍的分區搜索縮小了搜索空間,從而減少了計算時間。
通過這一方法,我們能夠在大規模重復環境中實現高效且準確的單次定位,為工業物流和機器人應用提供了經濟實用的解決方案。
實驗效果



總結一下
該文章提出了一種應對非視距 (NLoS) 問題的 UWB 標定方法,利用 SLICT 生成連續時間軌跡。通過采樣 UWB 采集的姿態并應用迭代高斯過程,我們成功地在600x450平方米的大規模環境中實現了大約2米的標定精度。即便在傳統 UWB 定位失效的非視距條件下,標定后的基站位置也能作為獨立插件,提高重復性和大規模環境中的單次定位成功率。實驗表明,配備稀疏 UWB 和車載 LiDAR 的集裝箱運輸自動移動機器人可以在具有挑戰性的重復環境中實現精確的單次定位,同時成本最低。