3500元,人形機器人1:1復刻人類動作 | 上海AI Lab開源新成果
《環太平洋》名場面之“用真人操縱機甲”,如今照進現實了。

話不多說,請看VCR:
原來,這是上海AI Lab最新推出的人形機器人“駕駛艙”——HOMIE(Humanoid Loco-Manipulation with Isomorphic Exoskeleton Cockpit) 。
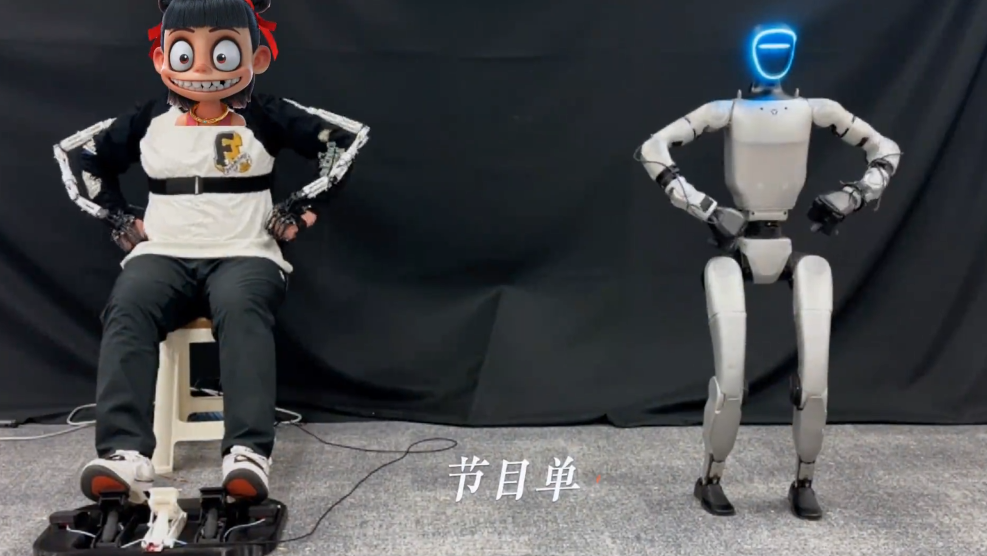
一副機械臂外骨骼、一雙動作感應手套,以及一塊三軸腳踏板,人們就能對雙足人形機器人全身進行精準遙操作了。
這也意味著,無需昂貴動作捕捉設備,人形機器人也能1:1復刻人類動作。

根據研究團隊的說法,HOMIE主打一個“快準省”:
- 快:與傳統最快VR手柄采集方案相比,速度還要快200%,任務完成時間縮短50%;
- 準:解決了傳統人形機器人遙操作面臨的全身協調控制難(需同時控制移動與操作)和高精度指令獲取難(依賴昂貴動捕設備或視覺算法)兩大難題,支持其完成搬運、協作、開門等復雜移動操作任務;
- 省:整套硬件僅約3500元人民幣,而且HOMIE還開源了。
該系統由強化學習驅動的運動控制框架和低成本同構外骨骼硬件組成,首次實現了單一操作者對雙足人形機器人全身的精準遙操作。
由強化學習驅動的運動控制框架
這第一步,我們先來拆個箱,詳細康康上面提到的“三件套”。
三大核心組件
一直以來,傳統人形機器人遙操作面臨兩大難題:
- 全身協調控制難:需同時控制移動與操作
- 高精度指令獲取難:依賴昂貴動捕設備或視覺算法
而HOMIE的突破在于將“人機同構”理念發揮到極致,其駕駛艙包含三大核心組件:
1、同構機械臂外骨骼:7自由度機械臂與機器人關節一一對應,操作者只需像控制自己手臂一樣運動,即可精準映射機器人動作,誤差小于0.09度,頻率高達260Hz。
2、動作感應手套:15自由度傳感器捕捉手指細微動作,霍爾效應磁感技術實現低成本高精度(200人民幣/只),可適配多種靈巧手型號。
3、三軸腳踏板:通過踏板控制機器人移動速度、轉向與下蹲高度,支持“踩油門式”直覺操作。

挨個來看的話。
同構外骨骼機械臂是基于Unitree G1與Fourier GR-1機器人形態定制,7自由度關節與機器人完全對應。
它采用Dynamixel伺服電機(精度0.09°),通過URDF模型對齊坐標系,確保操作者動作與機器人運動1:1映射。
通常情況下,它被固定于操作者背部與手掌,覆蓋機器人絕大部分工作空間且不限制人體活動。

至于200元/只的動作感應手套,它每根手指配備3組霍爾傳感器,捕捉指尖彎曲、指節偏轉等15自由度動作。
同時,磁鐵隨關節旋轉改變磁場強度,通過微控制器實時轉換為關節角度,支持即插即用適配多種靈巧手。

而腳下踩的三軸腳踏板,可以看到線性速度、轉向角速度、下蹲高度分別由三個踏板控制,壓力信號經高精度電位器轉換。
對了,模式切換按鈕支持前進/后退、左轉/右轉快速切換,操作邏輯類似汽車油門。

以上設計能夠讓操作者如同“穿戴”機器人,徹底擺脫傳統VR手柄的延遲與誤差。
實驗結果顯示,HOMIE的指令采集速度比最快VR方案快200%,任務完成時間縮短50%。尤其當操作者伸手抓取物體時,機器人幾乎同步響應。
而且,背后團隊特意提醒:
由于外骨骼基于同構概念設計,僅手臂部分需要根據不同機器人的手臂設計進行微調;不過因為現行人形機器人手臂設計基本是7自由度的范式,因此這個調整并不會很大。
手套和踏板部分對所有市面上的人形機器人都是通用的。
其次,我們來重點談談HOMIE背后所采用的強化學習。
在強化學習框架中引入三大創新技術
現有的強化學習方法無法讓人形機器人穩定、快速地下蹲到指定位置,同時現有方法均依賴于大量數據和運動先驗來實驗機器人運動對上身姿勢的適配。
前者很大程度限制了機器人的可操作空間,后者則提高了機器人訓練的成本。
為了最大程度拓展機器人的操作空間,并保證任何機器人都能快速學會在任何上身姿勢下保持平衡,HOMIE在其強化學習框架中引入三大創新技術:

1、上半身姿勢課程學習
傳統方法直接隨機采樣上身關節角度,訓練初期機器人頻繁失衡,導致訓練緩慢甚至無法訓練。而HOMIE引入了設計漸進式課程學習的方法,使得訓練過程中機器人上肢動作的采樣難度更平滑地提升:

- 初始階段限制上身動作幅度(動作比率ra=0),此時大概率上身姿勢保持默認姿勢,更容易訓得穩定步態;
- 當速度跟蹤獎勵達標后,逐步擴大ra至1,最終采樣分布變為純隨機分布??(0,1);
- 采用特殊概率分布平滑過渡,避免動作突變引發的失衡。
2、高度跟蹤獎勵函數
為拓展機器人操作空間(如從地面撿物或高處放置),HOMIE在通用的追蹤高度的獎勵函數基礎上引入了一個新的輔助函數:

該函數通過膝關節角度與目標高度的動態耦合,引導機器人自主調整蹲姿。
訓練中,每次對命令的采樣均保證有1/3環境專門學習下蹲,2/3環境學習站立行走,同一個環境在兩種模式下不斷切換,最終可以同時學會穩定的行走和下蹲。
3、對稱性增強技術
為了充分利用人形機器人的左右對稱性,避免人形機器人左右不對稱動作易導致失衡,HOMIE在數據采集與訓練中引入鏡像翻轉:
- 將觀測狀態(關節角度、速度等)沿x-z平面鏡像,生成對稱樣本。
- 在策略網絡優化時,額外計算對稱動作與價值的均方誤差損失,強制網絡學習對稱行為。
已通過從仿真到現實的全面驗證
研究人員針對HOMIE強化學習框架中提出的三個新的方法分別進行了蒸餾實驗,將得到的結果在幾個關鍵指標上進行測試,最終發現:
1)上半身姿勢課程學習可以充分幫助機器人更快的學會在各種連續變化的上身姿勢下保持平衡并穩定行走,并且HOMIE的課程學習方式確實比直接利用隨機概率進行課程學習更加優越;
2)高度跟蹤獎勵函數的提出相比于只用高度追蹤獎勵函數,能夠讓機器人更好、更快的學會穩定的下蹲,而簡單粗暴的調大高度追蹤獎勵的獎勵函數比例反而會讓機器人的學習更加困難;
3)對稱性增強技術的使用不止讓訓得的策略更加具有對稱性,更是直接大幅提高了機器人訓練的速度,從而提高了數據效率。

上述結論都表明,HOMIE的訓練框架很好的幫助機器人更好的學習完成移動操作任務,可以使人們獲得更好的移動操作底層控制策略。
而且,HOMIE不止能應用于Unitree G1,研究人員還使用同樣的框架訓練了傅利葉GR-1機器人。
結果證明,即使G1和GR-1在結構和尺寸上差別很大,HOMIE的強化學習框架依然能夠讓GR-1快速學到穩定的行走和下蹲。

與此同時,研究人員對HOMIE的硬件系統進行了系統性的測試,并發現得益于舵機和霍爾傳感器的使用,這套低成本的硬件系統具有極高的響應頻率和姿勢獲取精度。
同時由于同構的設計,系統不需要額外進行姿勢估計和求解,在無需GPU和SoC的前提下依然可以達到遠超別的方法的姿勢獲取頻率。

此外,研究團隊利用HOMIE在不同環境下完成了豐富的移動操作任務。
包括從低貨架拿貨物到高貨架、兩人分別用HOMIE一起完成物體在兩臺機器人之間的傳遞、貨物搬運、推人前進、開微波爐、撿水平、捧花等復雜的動作,這些任務充分體現了HOMIE遙操人形機器人完成任務的多樣性。
任務本身對機器人全身協調能力的高要求也證明了利用HOMIE框架訓練得到的策略的穩定性。

為了展示使用HOMIE的硬件系統進行桌面遙操任務的優越性,研究人員還在4項桌面任務中,用HOMIE和VR方案(OpenTelevision)分別完成四個不同的桌面任務。
最終發現,HOMIE在完成速度上具有顯著優勢,尤其在需要精確徑向移動的任務中完成速度超過VR方案的2倍。

同時,研究人員還初步嘗試了用HOMIE采集數據訓練模仿學習算法的可能性。
通過在下蹲撿蘋果和站立撿蘋果兩個任務上分別采集50條數據,并利用Seer模型進行訓練,從而部署到真實機器人上,最終取得了超過70%的成功率。

概括而言,HOMIE的價值不僅在于技術突破,更在于其開源與低成本特性(整套硬件僅約3500人民幣)。
目前主流的基于VR的方法是OpenTelevision,是基于Apple的VisionPro進行操作,目前一臺最基本的256G的Vision Pro國內售價約3萬人民幣,因此其成本只有VisionPro的約12%。
它讓人形機器人擺脫動捕依賴,像智能手機一樣通過“直覺化駕駛艙”走入倉庫等復雜場景。
正如團隊所言:
或許不久的將來,每個機器人都會擁有自己的“神經連接駕駛艙”,而HOMIE正是這條征途上的第一塊里程碑。
鑒于已經開源,動手能力強的小伙伴已經躍躍欲試啰~

論文鏈接:https://arxiv.org/abs/2502.13013
項目主頁:https://homietele.github.io/
代碼申請:https://forms.gle/NSLiABo3bPWN89wZ8