













機器金槍魚尾部內置的彈性調節執行器能根據當前游動速度實時調節尾部彈性。來源:Qiang Zhong(鐘強),Daniel Quinn /University of Virginia.
傳統的螺旋槳驅動水下潛航器系統能在特定的設計巡航速度下保持較高的推進效率,但通常無法同時在高速和低速下保持高推進效率。相對比之下,自然界的魚類卻能夠在較大的速度范圍內保持極高的游動效率。而其中的關鍵因素便是魚類那由肌肉構成的柔性身體。受此啟發,過去的研究人員開發了一些模仿魚類的柔性機器魚系統,如通過柔性液壓驅動器、柔性仿生肌腱來模仿魚體的解剖學結構。然而,如何選擇合適的彈性設計卻是一大難題。
不恰當的彈性結構設計會降低機器魚的游動性能,其推進速度和效率也往往遠不及生物學原型。機器魚尾部的剛度就如同自行車上的換擋齒輪。固定彈性(剛度)設計的機器魚就像是一臺不能變速的自行車,僅僅一小段山路就足以令人精疲力竭。但通過變速機構,我們則可以針對不同騎行路況選擇最優擋位來節省體力。全面且細致地研究尾部彈性對于游動性能的影響及其背后的流體力學機理,對于未來高性能仿生水下潛航器的開發至關重要。
在最新一期《Science Robotics》的文章中,來自弗吉尼亞大學的教授 Dan Quinn 和博士后鐘強結合生物力學、流體力學和機器人學揭秘了如何利用動態彈性調節實現高性能游動。該研究介紹了一種具有動態尾部彈性調節功能的機器金槍魚平臺,能夠根據當前的游動速度通過可編程的人造肌腱自動調節尾巴剛度。通過動態彈性調節,該機器金槍魚在實驗中實現了更大的游動速度調節范圍的同時實現了接近 100% 的推進效率增長。這種動態彈性調節方法解決了目前柔性仿生機器魚的性能瓶頸,并為將來開發高頻率、高速的大型仿生水下潛航系統提供了新的解決方案。

論文地址:https://robotics.sciencemag.org/content/6/57/eabe4088
材料硬度難以把控?
不如學魚類自行調節尾部「硬度」
生物學研究認為,魚類在通過自身肌肉驅動尾部擺動的同時,部分肌肉也被應用于身體彈性調節以實現高推進效率。金槍魚通過肌肉控制貫穿全身的肌腱系統來調節尾巴彈性。但由于其結構特性,我們沒有辦法直接在活的金槍魚體上測試動態彈性調節對于游動性能的影響。
為了探索金槍魚在變速游動中的彈性調節機理以及其背后的流體力學原理,我們以金槍魚解剖結構為原型并將其建模,基于此設計了機器金槍魚平臺。不同于此前的仿生學研究偏向于模仿魚體結構及游動姿態,我們刻意地減少了魚體結構復雜度以專注于研究尾部彈性對于游動性能的影響。除此之外,我們還配套開發了高頻率驅動裝置來驅動機器金槍魚,以達到類似真實金槍魚的游動頻率(7 赫茲左右)。
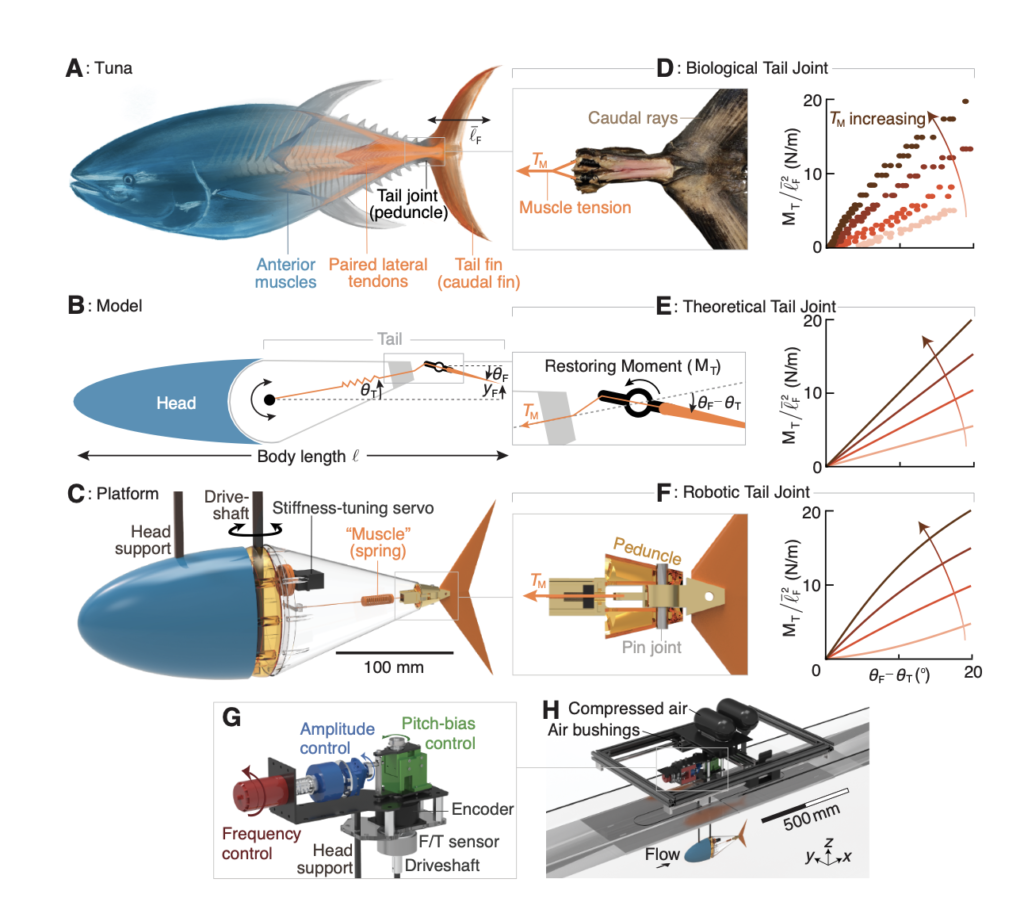
基于真實金槍魚結構和簡化數學建模設計機器金槍魚。
結合流體力學與機器人學,來看看游動的魚尾如何變「硬」
在這個研究中,我們結合機器人學和流體力學,同步從流體力學建模和實驗兩個方向入手來全面探索動態彈性調節對于游動性能的影響。通過結合魚體的動力學模型和非定常空氣動力學模型(Theodorsen Model), 我們能夠用數學模型對動態彈性調節和魚體游動性能做出預測。除此之外,我們還開發了一套智能化的信息物理實驗系統,并在我們設計的機器金槍魚上開展了大量實驗。
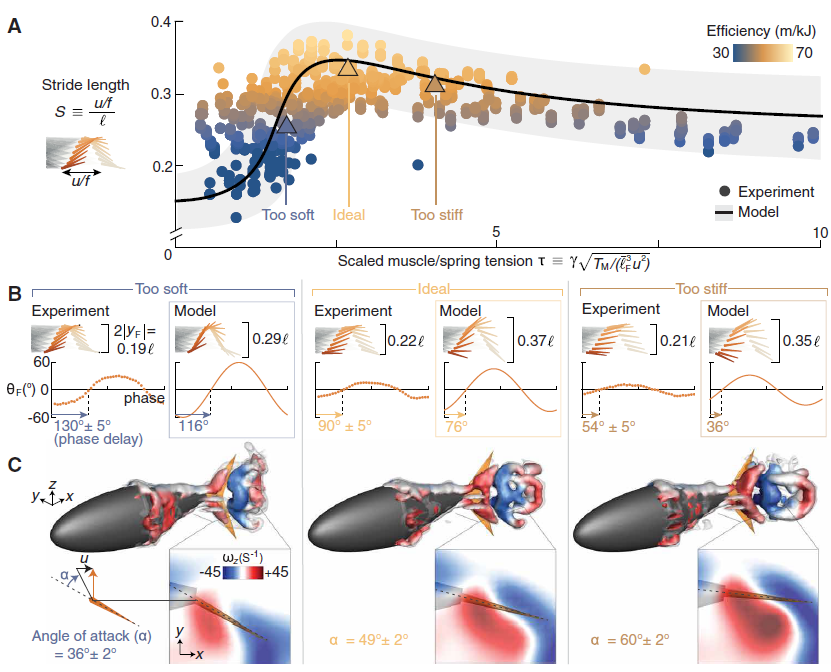
流體力學實驗和數學模型預測高度吻合,由此得出尾巴彈性應根據游速平方比例調節以實現最高游動性能。
我們發現,在變速游動過程中,尾巴的彈性系數應隨著游動速度平方比例增長,從而通過這種簡單的調節來實現最高推進效率。為了進一步驗證動態彈性調節在真實環境中的有效性,我們利用信息物理實驗系統去模擬了長續航機動游動任務,在與金槍魚相似的游動參數范圍內(擺動頻率:0 到 6 赫茲,游動速度:0 到 2 體長每秒),動態彈性調節最多能實現接近 100% 推進效率提升。
動態彈性調節應用前景廣闊
我們提出的動態彈性調節方法解決了困擾研究人員多年的柔性仿生機器魚的性能瓶頸,為未來設計高頻率、高速的大型仿生水下潛航系統提供了理論基礎。該研究結果不僅適用于當前的機器金槍魚平臺,更能拓展至很多其他的仿生推進應用場景。基于我們的模型預測,動態彈性調節尤其適合于大尺寸、高速、高頻率的仿生潛航器。該項研究為未來的高性能仿生推進系統開發提供了新的解決方案,有望大幅度提高仿生柔性機器系統的推進性能和應用能力,讓柔性智能設備從單一的實驗環境走向實際海洋作業等復雜場景。
























