













去高精地圖成為自動駕駛行業趨勢,這正確嗎?
2022年下半年到進入2023年重感知輕地圖的大趨勢似乎一下子就席卷了整個自動駕駛行業,車企自動駕駛都大張旗鼓的宣布要擺脫高精地圖從而拓展高階自動駕駛功能的覆蓋范圍,甚至連一直強調高精地圖在全無人的自動駕駛安全性上至關重要的L4公司如小馬,元戎也開始轉向投入到去高精地圖的技術研發之中。猶記得高精地圖曾是Diss某西方大廠的兩大核心法寶之一,如今高精地圖轉眼變成人見人嫌,人們對激光雷達的熱情也開始逐漸冷卻,真可謂前天還是小甜甜,轉眼間就變成了牛夫人。
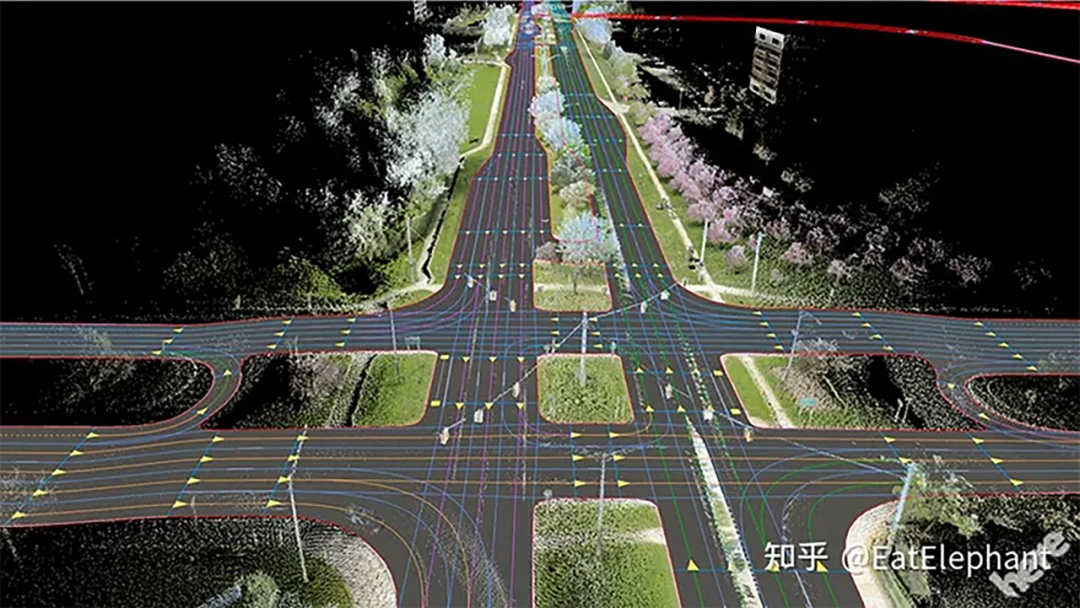
基于點云幾何圖層衍生出來的具有厘米級別精度的車道語義圖層的高精地圖曾被視為自動駕駛必不可少的基礎設施
01 高精地圖到底惹誰了
作為從事過高精定位和靜態BEV感知算法研發人員可以很負責任的講,高精地圖有百般好,可以說是誰用誰知道,高精地圖極大的簡化了自動駕駛功能的研發,可以彌補感知能力的上限,做到對周圍靜態環境的了如指掌,還可以提供超視距的靜態環境信息,讓車輛擁有超越傳感器限制的超前量, 最重要的是在高精地圖的世界里一切靜態環境都是確定的,道路限速,特殊車道,前方路形分叉匯合,曲率變化,一切都確切無疑毫不含糊。這一切的一切都使得基于高精地圖的自動駕駛難度和復雜性下降了至少一個數量級,因此很多人在高精地圖上的自動駕駛與其說是自動駕駛汽車不如說更像是運行在虛擬鐵軌上的自動駕駛火車。
好的東西一般有一個缺點就是貴,高精地圖也不例外。高精地圖的貴體現在多個方面,傳統高精地圖制備方法需要非常昂貴的采集設備,一般一輛具備高精地圖采集能力的地圖采集車成本在百萬元以上,即使行業頂尖的圖商據我了解其高精車隊規模也就在百八十兩輛這樣的量級,算上人工,維護,車隊成本粗略估計也是十億量級。
這樣的量級,覆蓋全國高速已經實屬不易,而全中國高速大概不到20w公里,只占500w公里總公路長度的不到4%,要憑借幾百輛采集車覆蓋道路元素更豐富,采集難度更大的城市道路難上加難,更不要說作為基建狂魔的我國城市道路不斷的進行翻修,要保持高精地圖的時效性更是幾乎不可能完成的任務了。
另外我國地圖測繪資質管制極其嚴格,高精地圖被認為是關乎國家安危的大事,地圖的發布要做到每個圖商逐城審核,層層把關,對其發布進度的把控遠遠超出了圖商和車企可控范疇,勢必對自動駕駛產品的功能擴展發布造成重大影響。這樣的資金成本和時機,政策成本都讓個大車企不得不考慮放棄高精地圖。

武裝到牙齒的采集車,其中高精Riegl測繪激光雷達成本一般上百萬
02 自動駕駛是否能離開高精地圖
高精地圖作為曾經被認為是自動駕駛不可或缺的重要基礎設施,想要去掉對高精地圖的依賴遠比說起來困難。自動駕駛的感知部分依賴于高精地圖提供的先驗信息來避免誤撿漏檢,定位本質上是在高精地圖而不是在現實世界上確定自車的位置姿態,道路參與者行為軌跡預測依賴于高精地圖所存儲的參與者所處位置的環境信息,自車軌跡規劃也要基于高精地圖所提供的無懼遮擋的超視距信息來進行決策。
事實上目前真正能稱得上不依賴高精地圖的自動駕駛功能唯有Tesla做到過,也正是因為有人在前邊領跑,大家才有底氣去嘗試類似的技術方案。根據Tesla的技術分享和個人的理解,我認為不依賴高精地圖的自動駕駛主要有三個難點:
1.更強的感知能力
具備強大的靜態感知能力,能夠在不依賴高精地圖先驗的前提下最大限度的感知周圍駕駛環境,包括遮擋或道路元素磨損情況下腦補出道路環境的能力。另外針對無圖方案,感知需要能夠輸出可通行區域的能力,因為在車道線磨損或缺失的場景下再沒有高精地圖提供虛擬車道和行駛參考線,那么可通行區域就決定了車子哪里能走,怎么走。最后要通過感知道路環境形成一個帶有置信度的感知感知結果,因為沒有高精地圖給出的確定性環境信息,下游必須知道哪里的感知是可信的,哪里是相對不確定的。

Tesla FSD的感知中灰色區域代表不可通行區域,感知元素的透明度代表感知的置信度
2.要求更高的定位和地圖使用
不依賴高精地圖不代表無地圖,實際上宏觀層面的軌跡規劃離不開超視距的地圖信息,視野范圍外的預測決策也都離不開地圖,而使用地圖的前提則是相對精確的定位能力。事實上從第一性原理角度出發人類駕駛也斷不能離開地圖,無論是人類駕駛員腦海中構建的對自己熟悉的街區的記憶地圖,還是如今現代駕駛員越來越習慣依賴的導航地圖都是做好駕駛必不可少的一環。
離開了高精地圖的加持,想做到精確的定位變得愈發困難,依賴于感知地圖匹配的方案失效意味著GPS,IMU,輪速計便成了自動駕駛功能更需要倚重的傳感器。包括Tesla和Comma AI在內的不依賴高精地圖的自動駕駛公司,都很強調對于GPS,IMU,輪速所組成的組合導航的使用,使用更加底層的原始信號,加入更多對自車軌跡,噪聲的約束,以及用導航地圖拓撲對于軌跡形成約束,眾多的方式都是之前自動駕駛團隊較少涉及領域,然而地圖的信息量降低了,可用于定位的傳感器也變少了,就更需要團隊利用好手中僅存的資源做好全局和相對定位,才能最大程度利用好導航信息。
所以擺脫高精地圖不代表就不做定位,不實用地圖,恰恰相反,當你手中食材有限,仍舊要做出色香味俱全的佳肴,代表對烹飪技巧必須更加精益求精。有關注Tesla FSD測試視頻的朋友應該會記得早在2020-2021年,導航引起的接管仍舊是FSD接管最重要的原因之一,時至今日導航問題雖然已經大大減少了,但是仍舊是困擾FSD用戶的一大癥結。
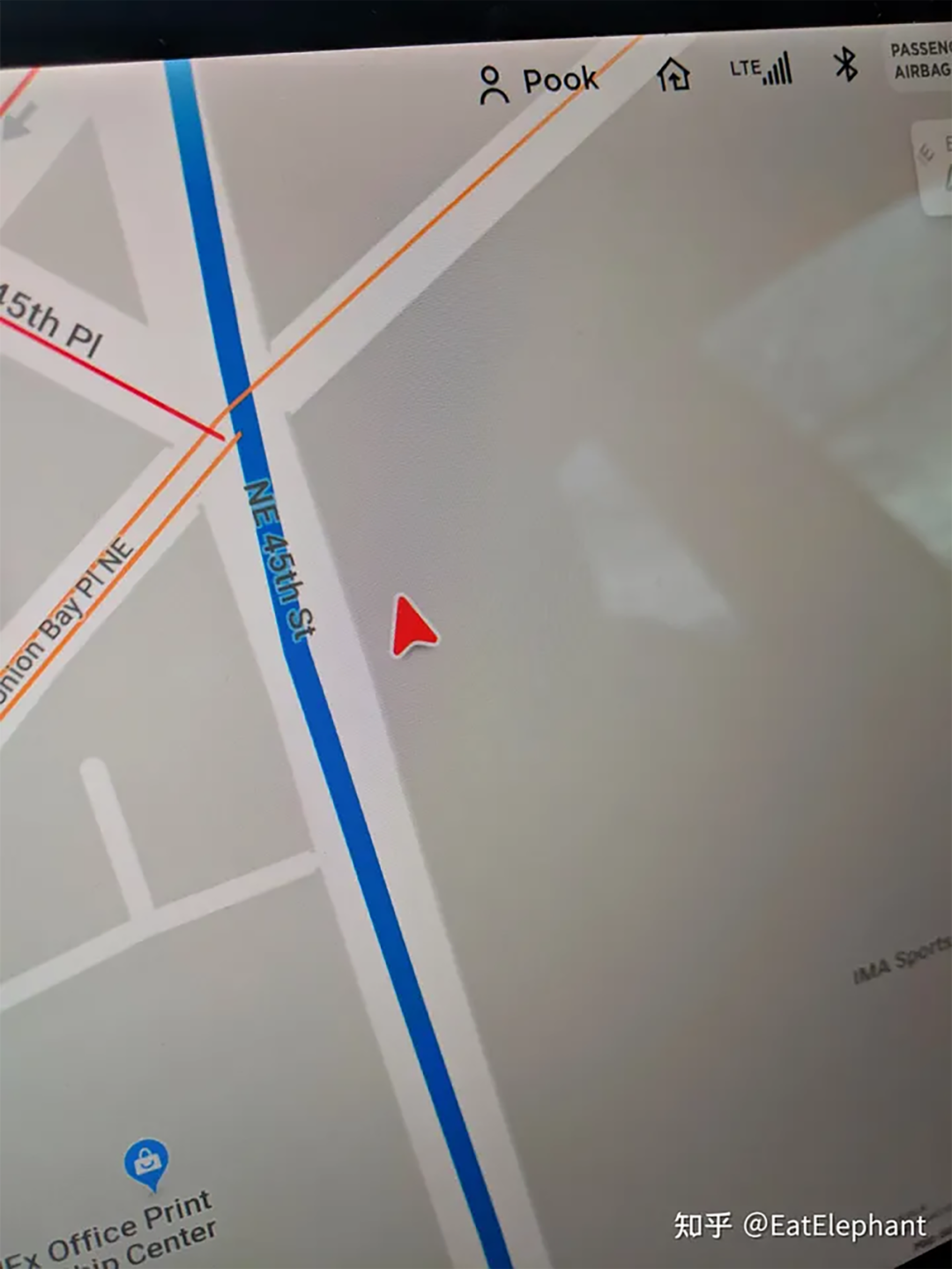
缺少高精地圖和感知地圖匹配所帶來的精確定位能力,FSD也經常被GPS定位不準問題所困擾
3.在不確定性環境下進行決策規劃的能力
沒有了高精地圖挑戰最大的莫過于決策規劃模塊了,失去了高精地圖提供的完善的參考軌跡,規劃模塊必須具備在更廣泛的可通行區域內規劃出合理的路徑的能力,失去了定義明確的車道,軌跡規劃就再不能簡單的拆解成橫向和縱向,寬度和形狀都不規則的可通行區域也對空間離散和無碰撞的最有路徑求解所需要的算力和時效性提出了非常高的要求。另外高精地圖的缺失意味著依賴于感知輸出的周圍環境是充滿不確定性的,決策規劃必能夠接受這種不確定性,并利用子車行為去降低這些不確定性的影響。
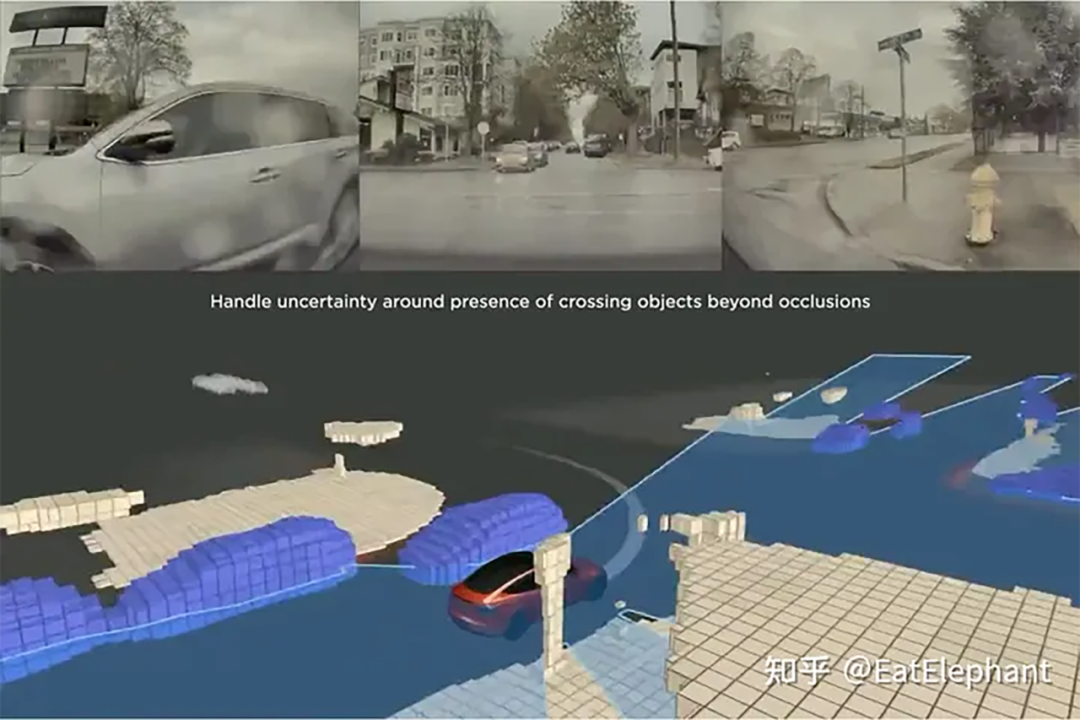
FSD利用Occupancy來建模遮擋,并利用自車緩行開視野就是利用自車規劃來降低無圖不確定性的一個絕佳案例
03 一點思考
我個人覺得做技術的人其實不應該講究什么主義或流派,一切應該從實際情況和功能實現角度出發。高精地圖具有巨大的價值,但其建設維護成本一直是其最大的致命傷。Tesla使用不依賴高精地圖的方案是出于一系列權衡取舍以及技術洞見,其結果是不依賴高精地圖的自動駕駛功能,其條件是環環相扣的技術方案設計和構建,所以要想同樣實現不依賴高精地圖的功能,傳統技術方案的各個環節都需要巨大的推翻充足和迭代創新,絕不是單單引入BEV感知就可以的,照貓畫虎是絕對不可取的。
另外Tesla是一家國際化的公司,其市場面向全球,很難想象巴西,菲律賓擁有完善且維護良好的地圖基礎設施,所以拋棄高精地圖對于致力于全球化的Tesla是必然也是迫不得已。顯然通過單純的模仿是無法超越行業領頭羊的,過去幾年高精地圖和激光雷達一直被認為是國內自動駕駛超越Tesla所倚仗的兩點優勢,這個到了今天其實沒什么改變。
顯然優先國內市場的國內企業不應該一味學習Tesla,在高精地圖可用的條件下棄之不用有一點自廢武功的意味。國內高精地圖采集建設的條件顯然高于其他一些國家,在這種情況下優化建圖特別是眾包建圖技術,降低地圖維護成本,同時推動算法對不同等級地圖的兼容并包,提高自動駕駛功能對不同等級地圖的包容性也許是一條可以彎道超車的機遇之路。
























