聊聊視覺慣性里程計的IMU預積分模型
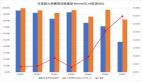
為什么工程實踐中我們使用視覺與IMU融合的解決方案即視覺慣性里程計(VIO)來估計運動而不是簡單地使用視覺里程計(VO)。視覺慣性里程計的傳感器主要包括相機和慣性測量單元(IMU)兩種傳感器各有優缺點,VIO的優勢就在于IMU與相機的互補性。
視覺傳感器在大多數紋理豐富的場景中效果很好,但是遇到玻璃或白墻這樣特征少的場景就很難有效工作了。盡管如此相機數據的優點在于數據基本不會有漂移。如果將相機放在原地固定,那么估計的位姿也是固定不動的。
IMU傳感器本身也是有自身缺點的,比如IMU長時間使用就會有非常大的累積誤差。但是在短時間內,其相對位移數據又有很高的精度,所以當視覺傳感器失效時,融合IMU數據,能夠提高定位的精度。IMU雖然可以測得角速度和加速度,但這些量都存在明顯的漂移,使得積分兩次得到的數據就會存在很大誤差。如果將IMU固定不動,其數據也會因為漂移的影響使得積分得到的位姿飄走。但是對于短時間內的快速運動,IMU能夠提供相對準確的估計,這又剛好彌補了相機的缺點。相機運動過快時會出現模糊或者兩幀之間重疊區域太少無法匹配。
IMU和相機就這樣相輔相成,因此現在很多SLAM算法的研究都是融合相機和IMU數據進行位姿估計。
IMU誤差部分
一提到VIO,相信很多人都會立刻想到一個名詞——預積分。這也是希望接觸VIO的研究者們最長看到的詞匯。那么究竟預積分是怎么回事,為什么預積分在VIO中這么重要,就是接下來討論的重點了。

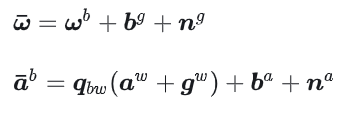

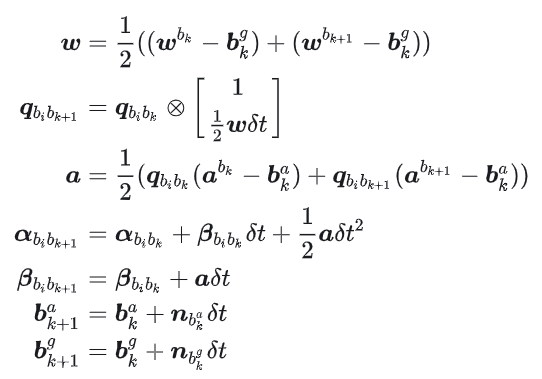
從上面的公式可以看出,我們讀的數據都不是客觀事實,是在客觀事實的基礎上疊加上傳感器的誤差,也就是偏置和噪聲。
a 和 g 分別表示 acc 和 gyro,w 表示在世界坐標系,b 表示IMU體坐標系。在后面的公式中會有很多下標,很容易混淆。
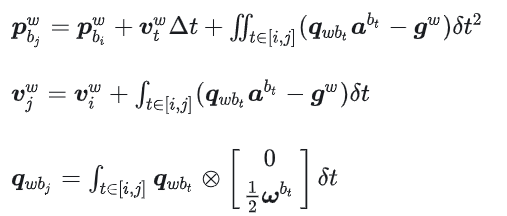
位移,速度和姿態(position, velocity, quaternion, i.e. PVQ)對時間的導數可以寫成
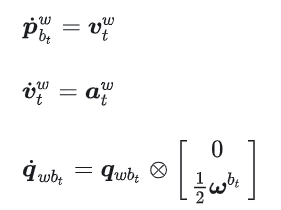
前兩個公式沒問題,就是三個運動量之間的積分微分。第三個關于四元數微分,在這里稍微推導一下,方便大家后續閱讀。
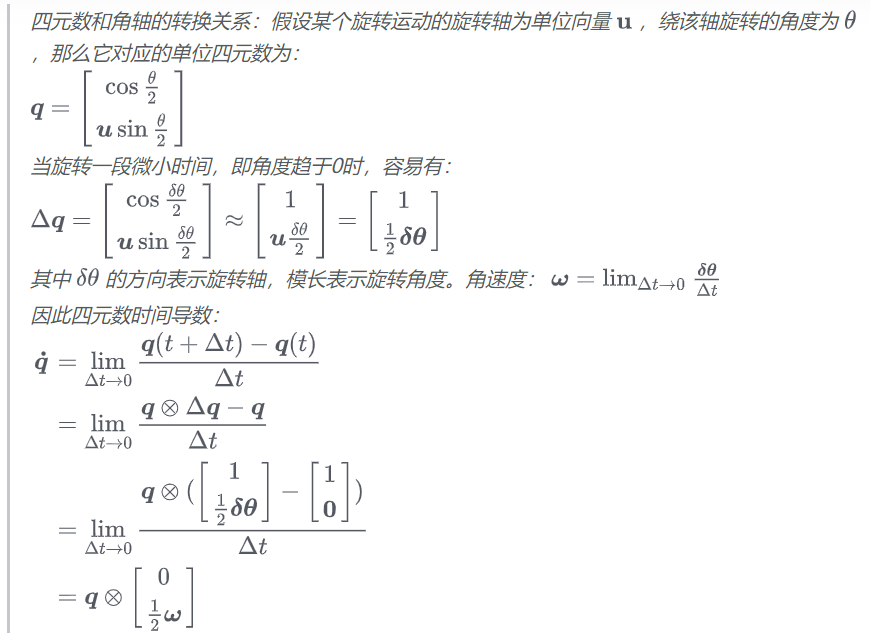
中間穿插了一段四元數推導,現在繼續。
從第 i 時刻的PVQ 對 IMU的測量值進行積分得到第 j 時刻的PVQ:
因為IMU的采樣頻率高,通常為100Hz - 1000Hz,數據量非常大,在做優化的時候,不可能將如此多的數據都放到狀態變量中,因此通常的做法是每隔一段時間提取一個數據,比如每隔1秒提取一個。也就是上式中假如 i 是第一秒提取的IMU數據,j 是第二秒提取的IMU數據。基本過程就是:已知第 i 秒的PVQ;第 i 秒和第 j 秒中間所有數據(如100個)以及我們已知的運動學知識積分,從第 i 秒一點一點積分得到第 j 秒的PVQ。但是這樣在做后端優化的過程中,當我們進行迭代求解計算來更新和調整PVQ的值時,一旦(比如第 1 秒)的PVQ進行了調整,每一個中間過程以及后面所有的軌跡都要重新再積分算一遍,如果是100Hz,兩秒之間有100個采集數據,就要計算100次積分。有沒有什么方法是可以不用如此牽一發而動全身,擺脫冗繁的積分過程?預積分的目的就是嘗試將這100次積分過程變成只有1次積分,或者說用1個值來代替100個值,通過預積分模型的應用可以大大節省了計算量。
一個簡單的公式就可以將積分模型轉為預積分模型。


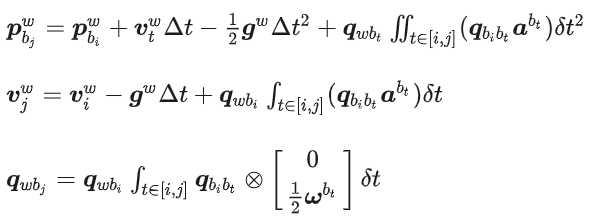

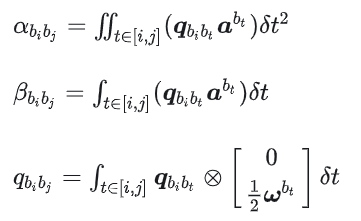
改叫 IMU預積分。分別對應了位置,速度和姿態。
預積分量僅和IMU測量值有關,它將一段時間內的IMU數據直接積分起來就得到了預積分量。
下圖為IMU和視覺傳感器的模型,可以在一定程度上幫助理解。
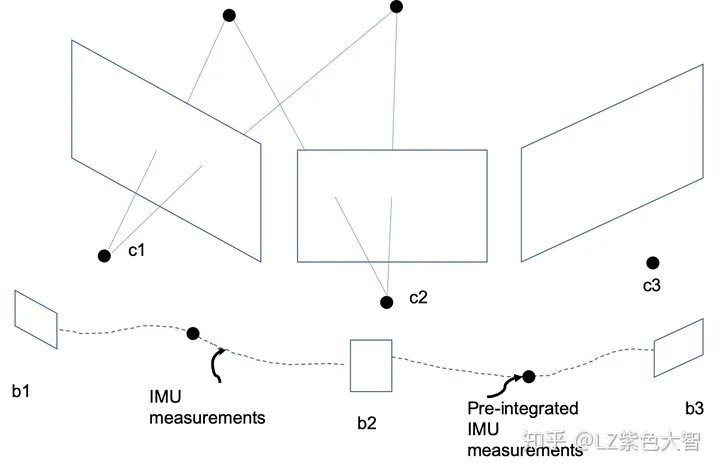
IMU相機模型
預積分的離散形式

IMU的預積分誤差
一段時間內IMU構建的預積分量作為測量值,對兩時刻之間的狀態量進行約束。
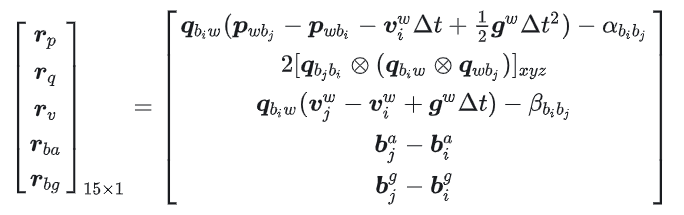
誤差中的位移,速度和偏置都是直接相減得到的,也就是測量值減估計值。第二行是四元數的旋轉誤差。
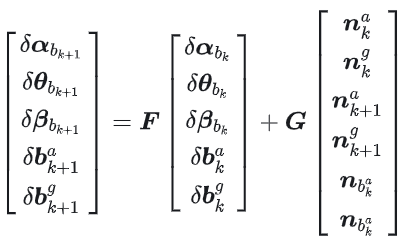
通過將積分模型轉化為預積分模型有效地減小了計算量,但是我們同時丟失了一些東西。當我們用1個結果代替(如100個)數據點的時候,我們就不知道這1個結果的不確定度了。在轉化之前,這100個數據點每一個數據點的不確定度我們是知道的(因為IMU數據作為測量值的噪聲方差我們能夠標定),但是這100個數據積分形成的預積分量的方差是多少呢?這就需要我們在得到IMU預積分的結果之后,還要推導預積分量的協方差,需要知道IMU噪聲和預積分量之間的線性遞推關系。
假設已知了相鄰時刻誤差的線性傳遞方程:

即誤差的傳遞分為兩部分:當前時刻的誤差傳遞給下一時刻,當前時刻測量噪聲傳遞給下一時刻。
協方差矩陣可以通過遞推計算得到:



其中
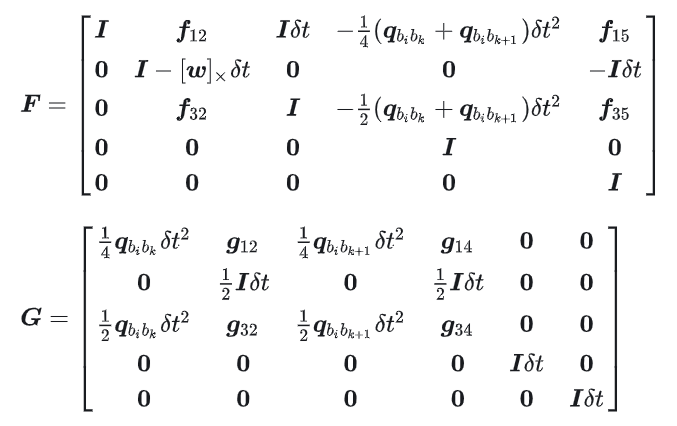
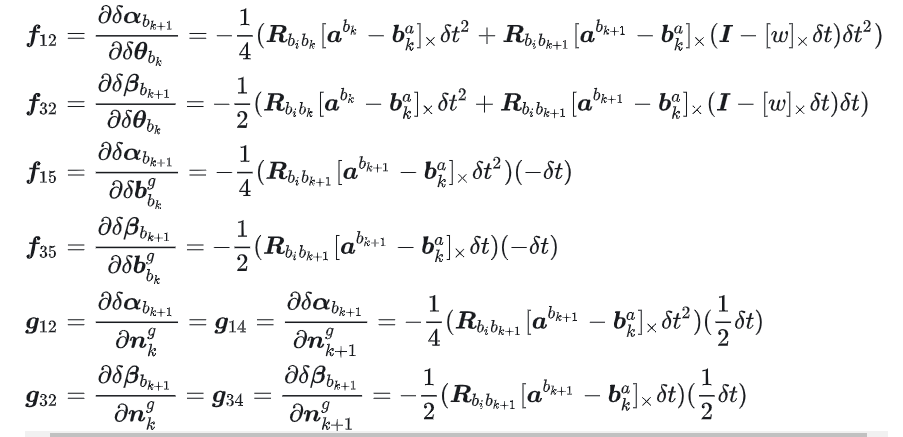
以上結果的推導利用了李群李代數的知識,過程過于繁復,因此沒有在這里展開推導過程,以上結果與主流VIO開源代碼(VINS-MONO)中寫出的公式形式相同,讀者可以直接對應代碼中的部分來對照。如果有時間,我會再更新以上公式的推導過程。
以上就是預積分的簡要介紹,在VIO開源框架(如VINS-MONO)中,IMU預積分部分屬于前端部分,是在采集了IMU數據之后就立刻進行的運算。在完整的VIO系統中除前端外還有很多其他的部分,包括:初始化部分(即IMU數據與相機數據的對齊)以及最重要的后端優化求解部分。而后端優化求解還包括很多內容,比如整體的目標函數如何構建,求解優化的過程中運用了滑動窗口的方法來保證狀態量的數量從而控制計算量等,隨著我個人學習進度的推進還會進行總結和整理。